基于飛行器姿態控制系統的導引頭跟蹤實驗
2015-03-27 03:02:31王佳偉楊亞非錢玉恒
實驗技術與管理 2015年6期
關鍵詞:實驗
王佳偉, 楊亞非, 錢玉恒
(哈爾濱工業大學 飛行器控制實驗教學中心, 黑龍江 哈爾濱 150001)
基于飛行器姿態控制系統的導引頭跟蹤實驗
王佳偉, 楊亞非, 錢玉恒
(哈爾濱工業大學 飛行器控制實驗教學中心, 黑龍江 哈爾濱 150001)
為形象地模擬導彈跟蹤目標時的姿態控制和調整過程,提高學生對于飛行器控制課程的理解,開發了飛行器姿態控制系統的導引頭跟蹤實驗。介紹了實驗系統的組成,包括硬件結構和軟件平臺;闡述了導引頭跟蹤目標實驗的原理,分別驗證了在目標靜止和運動情況下,導引頭對目標進行跟蹤的效果,并且得到了仿真圖形。
飛行器姿態控制系統; 導引頭; 目標跟蹤
導引頭是導彈系統的重要組成部分,作用相當于導彈的“眼睛”,通過導引頭跟蹤需要打擊的目標,獲取目標的圖像或者坐標,然后選擇相應的制導律來控制導彈飛行的軌跡和姿態,最終成功擊落目標[1-5]。上述過程的實驗仿真可以全部通過軟件編程來實現,優點是成本低、易于實現,但實驗效果不理想,學生難以形成感性的認識。哈爾濱工業大學飛行器控制實驗教學中心自制了飛行器姿態控制系統來模擬導彈導引頭的工作過程,學生可以通過該系統進行導彈制導律的設計和仿真驗證,更好地掌握理論課程的學習內容。
1 系統組成原理
飛行器姿態控制系統由轉臺本體、電控箱、運動控制器、傳感器件和軟件平臺組成(見圖1)。

圖1 系統總體組成圖
1.1 轉臺本體
轉臺本體如圖2所示,由2個轉動的機械結構件、伺服電機以及限位開關組成。結構設計采用U字形,具有位置、速率、搖擺和仿真運動功能,可用于各類飛行器目標特性飛行控制系統仿真試驗。

圖2 轉臺本體
轉臺的3個軸均采用直流力矩電機加增量式光電編碼器控制。伺服電機為40 000線,采用專用ADT-8940A1運動控制卡進行控制,可實現單軸相對運動,多軸插補運動等多種運動。轉臺在極限位置裝有2個限位開關,當轉臺運動到限位處時,限位信號使轉臺即刻停止。轉臺上安裝視覺傳感器(攝像頭)模擬導彈的導引頭,通過3個直流伺服電機來控制該導引頭的3個軸的運動,進行目標跟蹤。
靶標上的LED是用來模擬導彈所要跟蹤或者攔截的目標,可以通過串口發送命令控制點亮任意LED。靶標的轉動是模擬目標的位置變化,采用步進電機驅動,步進電機步進角為1.8°,驅動器進行200細分,即發送40 000脈沖步進電機旋轉一圈。
1.2 電控箱
電控箱內安裝有如下主要部件:伺服驅動器、I/O接口板、開關電源、開關、指示燈等電氣元件。
(4)技術力量在突破人類中心論中扮演了重要角色。因為技術力量對人類行為及其后果的改變,使得倫理學研究范疇超越了傳統的時間和空間范圍,因此,勢必將打破大部分早期倫理體系中的人類中心論地位。與早期倫理學關注人、人的行為和行為后果不同,技術時代的倫理視域已經擴展開來,并逐漸呈現出一種宏大的、整體的視角。人的倫理學不僅關注人,而且關注人類整體,關注人類處于其中的自然。此外,從一種存在主義的視角看,人類的獨斷的情感和態度,與人類自身生存的未來已經不相符合,對人類自身,尤其是大自然的認識需要調整適應,建立一種突破人類中心論的倫理學勢在必行。
伺服驅動器MLDS3810為直流伺服驅動器,它接收來自ADT-8940A1運動控制卡的PWM和DIR控制信號。
1.3 運動控制器
運動控制卡ADT-8940A1是基于PCI總線的高性能四軸伺服/步進控制卡,安裝在計算機上。可支持多達16塊控制卡,可控制64路伺服/步進電機,支持即插即用,采用脈沖輸出方式。
1.4 系統軟件控制平臺
實驗平臺仿真系統的開發軟件為Matlab7.0,通過Matlab7.0中圖形用戶界面(GUI)的程序編寫,控制程序與運動控制卡及硬件平臺的連接關系如圖3所示。
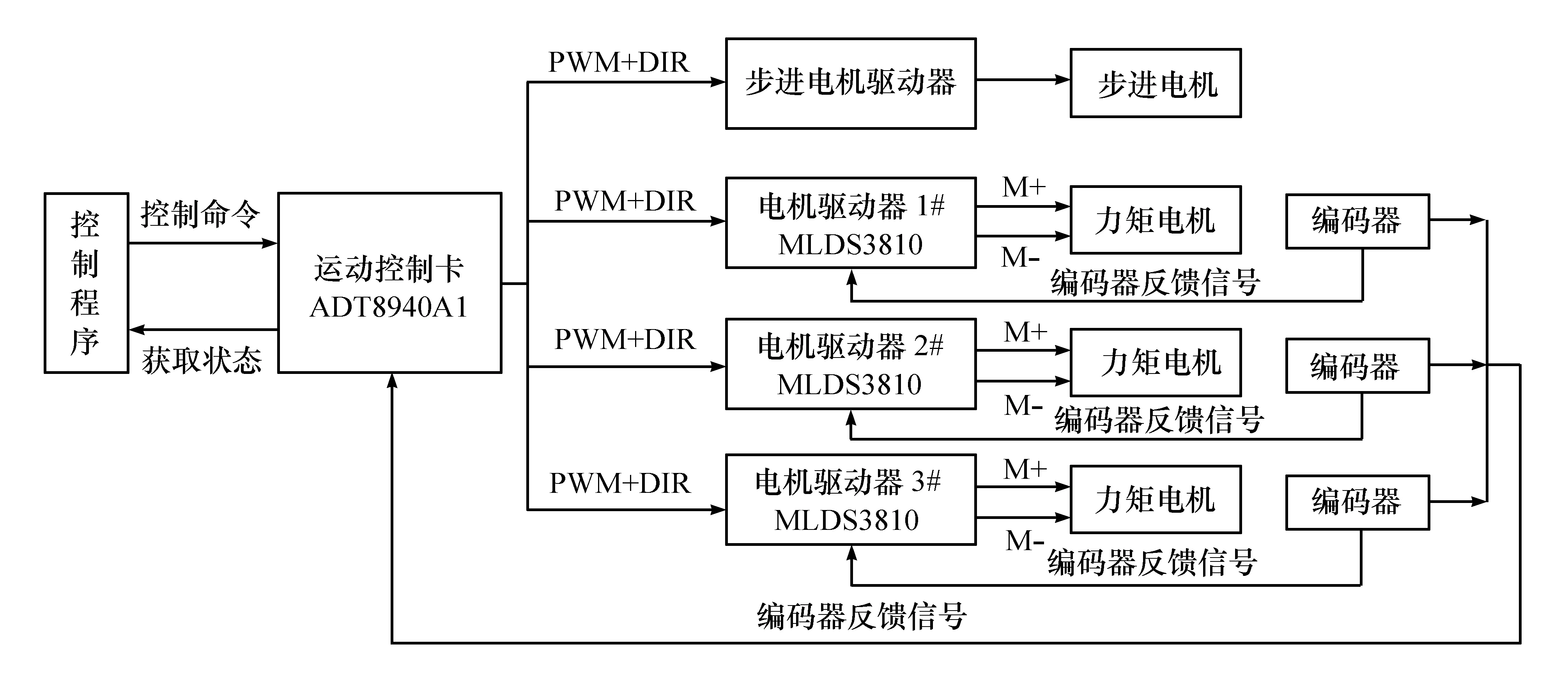
圖3 軟件控制過程
2 導引頭跟蹤實驗原理
靶標上點亮的LED燈模擬所要跟蹤或攔截的目標,通過步進電機控制靶標運動來模擬目標的運動情況。首先利用轉臺上安裝的攝像頭模擬導彈的導引頭,進行目標圖像的獲取,通過圖像算法進行處理,得到目標的位置信息;然后利用該位置信息作為給定輸入,選擇制導律,通過轉臺的3個力矩電機控制轉臺的運動,進而實現導引頭對目標的準確和實時跟蹤。
常用的圖像處理算法有很多種[6-11],包括圖像變換、圖像編碼壓縮、圖像增強和復原等。
本文選擇的圖像處理算法按照以下步驟進行:
第二步:對獲得的圖像進行切割,縮小圖像處理的時間;
第三步:灰度拉伸,圖像濾波處理;
第四步:二值處理,然后獲取目標點的質心位置坐標(x,y)。
經過圖像處理后得到坐標(x,y),作為目標跟蹤部分的給定輸入。選擇控制器的控制方法,可選PD控制和PID控制,輸出的控制信號經過電機驅動器,驅動力矩電機的運動,進而調整飛行器的姿態,即俯仰角和偏航角,使得導引頭始終能夠跟蹤目標。不論跟蹤靜止或運動的目標,如果LED燈的圖像始終位于視場的中心位置上,則說明實現了視覺跟蹤。
3 導引頭跟蹤實驗仿真
程序的界面如圖4。左邊是實時狀態顯示:第一個坐標圖是實時將圖像采集單元采集到的視頻動態顯示出來,圖右側顯示的狀態是實時的轉臺角度大小以及轉臺角度變化率;第二個坐標圖則顯示轉臺角度變化曲線。控制方法欄可以改變當前的控制方法或者控制方法的參數。

圖4 靜態目標跟蹤的程序界面
界面右側主要是控制方式和控制按鈕。控制方式框中可以選擇靶標是否運動,若選擇靶標運動,則靶標以轉動角度框中的輸入速度進行勻速轉動;若選擇靶標靜止,則靶標首先轉動到轉動角度框中的角度,然后靜止下來。控制方式面板可以設置LED運動變化率。若選擇LED變化,則LED按照設定的LED變化速率,在靶標上反復順次點亮;若選擇LED不變,則LED燈從默認的24號燈處,逐個亮到指定的LED燈號,然后靜止不再變化。
3.1 靜態目標跟蹤
靜止目標的跟蹤主要是驗證圖像處理部分的功能,驗證圖像處理算法的有效性。
實驗步驟是:在“控制方式”的“設置靶標”中選定“靶標靜止”,靜止的位置設置為5°;在“設置LED”中,選擇“LED不變”,則LED保持不變,即目標保持靜止。導引頭的初始位置可以是任意的,因此LED的出現不一定在視場的中心,導引頭獲取圖像,圖像經過軟件實時處理,可以得到LED燈的位置坐標(x1,y1),將其作為2個輸入,分別加到2個控制閉環上(見圖5),選擇PD控制器,指定P、D參數。
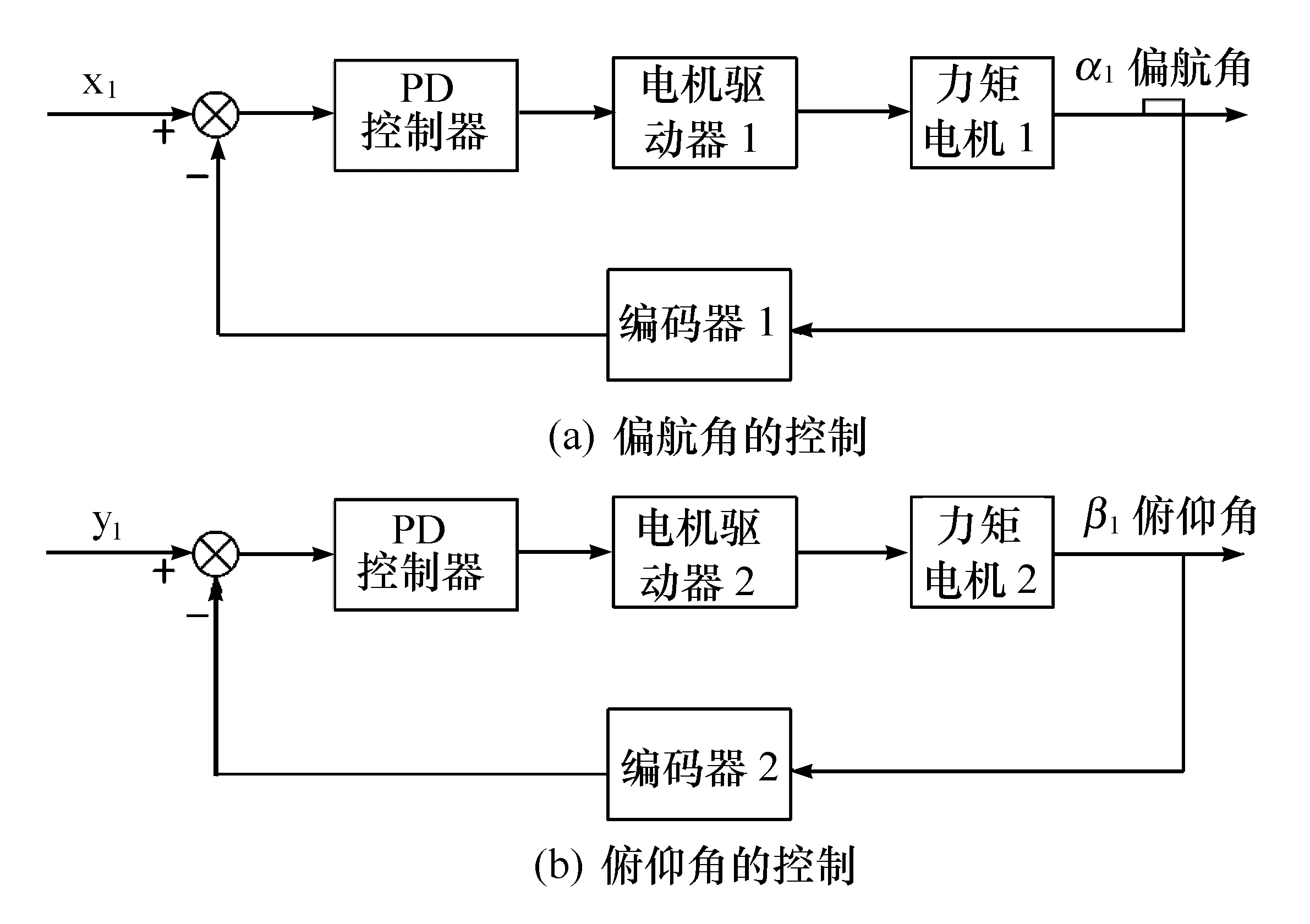
圖5 靜態目標的跟蹤控制
經過閉環控制的作用,電機控制轉臺運動,使得轉臺的俯仰角和偏航角發生變化,達到使導引頭對準目標的目的,這時目標出現在視場的中心,如圖4中左上的坐標所示。由于是靜態的目標,之后轉臺的俯仰角和偏航角保持不變,如圖4中坐標系中的曲線所示。
3.2 運動目標跟蹤
運動目標的跟蹤是驗證目標位置跟蹤算法的有效性和精度。
實驗步驟:靶標仍然設置為靜止,位置可保持在5°;在“設置LED”中,選擇“LED變化”,變化速率為每秒1個燈,則相當于目標是運動變化的。導引頭獲取圖像,經過軟件實現圖像處理,可以得到LED燈的位置坐標(x2,y2)。將位置坐標作為2個輸入,分別加到2個控制閉環上,選擇PID控制器,指定P、I、D參數(見圖6)。

圖6 運動目標的跟蹤控制
通過圖7可以看出,經過閉環控制的作用,電機帶動轉臺運動,使得轉臺的俯仰角和偏航角發生變化,達到使導引頭對準目標的目的,這時目標出現在視場的中心,如圖7中左上的坐標圖所示。由于是運動的目標,目標的位置是不斷變化的,則轉臺的俯仰角和偏航角跟隨著變化,如圖7中第2個坐標圖中的曲線所示,保證了目標始終處于視場的中心位置處,實現了跟蹤目標的目的。
4 結束語
飛行器姿態控制實驗系統為飛行器控制課程提供了一個很好的實驗仿真驗證平臺,解決了軟件仿真的不足,所設計的制導律符合工程實際的要求,使得學生得到了良好的實踐鍛煉。

圖7 運動目標跟蹤的程序界面
References)
[1] 趙善彪.紅外導引頭綜述[J].飛航導彈,2006(8):42-45.
[2] 毛峽,張俊偉.半捷聯導引頭光軸穩定的研究[J].紅外與激光工程,2007,36(1):9-12.
[3] 李世忠,李相平,李亞昆,等.毫米波導引頭的技術特點及發展趨勢[J].制導與引信,2007,28(1):11-15.
[4] 楊衛平,沈振康.紅外成像導引頭及其發展趨勢[J].激光與紅外,2007,37(11):1129-1132.
[5] 范晉祥.美國動能攔截彈紅外成像導引頭的發展分析[J].紅外與激光工程,2009,38(1):1-6.
[6] 周心明,蘭賽,徐燕.圖像處理中幾種邊緣檢測算法的比較[J].現代電力,2000,17(3):65-69.
[7] 劉志才,李志廣.紅外熱像儀圖像處理技術綜述[J].紅外技術,2000,22(6):27-32.
[8] 程正興,林勇平.小波分析在圖像處理中的應用[J].工程數學學報,2001,18(增刊):57-86.
[9] 王樹文,閆成新,張天序,等.數學形態學在圖像處理中的應用[J].計算機工程與應用,2004(32):89-92.
[10] 高浩軍,杜宇人.中值濾波在圖像處理中的應用[J].電子工程師,2004,30(8):35-36.
[11] 張旭明,徐濱士,董世運.用于圖像處理的自適應中值濾波[J].計算機輔助設計與圖形學學報,2005,17(2):295-299.
Seeker tracking experiment based on spacecraft attitude control system
Wang Jiawei, Yang Yafei, Qian Yuheng
(Experiment and Training Center for Flight Vehicle Control,Harbin Institute of Technology,Harbin 150001,China)
The spacecraft attitude control system can simulate the process of attitude control and adjustment of missile while tracking target,and improve the students’ understanding of the courses for spacecraft control. Firstly,the structure of the experimental system is introduced,including the hardware structure and software platform,and then the principle of seeker tracking target experiment is explained. Finally,the effect of seeker tracking to the target is verified through the target stationary and mobile cases,and simulation graphics are given.
spacecraft attitude control system; seeker; target tracking
2014- 10- 25
黑龍江省教學研究項目(JG2013010268)
王佳偉(1982—),男,黑龍江哈爾濱,在讀博士生,工程師,主要研究方向為控制系統的實驗研究和故障診斷.
E-mail:wangjiawei1982@163.com
TP271
A
1002-4956(2015)6- 0120- 03
猜你喜歡
作文·小學低年級(2025年2期)2025-02-13 00:00:00
小雪花·小學生快樂作文(2024年11期)2024-12-31 00:00:00
作文·小學低年級(2024年2期)2024-04-29 00:00:00
作文·小學低年級(2023年3期)2023-04-29 00:00:00
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
小主人報(2022年4期)2022-08-09 08:52:06
中學生數理化·中考版(2022年11期)2022-02-16 07:01:20
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55