水輪機調速系統抗負荷擾動的動態仿真研究
2015-03-27 03:02:15陳功貴杜陽維郭艷艷唐賢倫
實驗技術與管理 2015年6期
陳功貴, 杜陽維, 郭艷艷, 唐賢倫
(1. 重慶郵電大學 復雜系統分析與控制研究中心, 重慶 400065;2. 武漢鐵路職業技術學院 機車車輛工程系, 湖北 武漢 430205)
虛擬仿真技術探索與實踐
水輪機調速系統抗負荷擾動的動態仿真研究
陳功貴1, 杜陽維1, 郭艷艷2, 唐賢倫1
(1. 重慶郵電大學 復雜系統分析與控制研究中心, 重慶 400065;2. 武漢鐵路職業技術學院 機車車輛工程系, 湖北 武漢 430205)
對負荷擾動工況下結構復雜的非線性水輪機調速系統進行了仿真實驗研究。在Simulink環境下搭建了系統仿真模塊,實驗內容主要是不同調速器參數及被控系統參數的調節。實驗結果表明:參數選取決定了系統動態特性的優劣,合適的參數組合可使系統在一定程度上獲得最優的動態性能。學生通過Simulink仿真實驗,可以提高仿真實驗能力,并進一步掌握水輪機調速系統的結構和動態性能。
水輪機調速系統; 仿真; Simulink; 負荷擾動; 動態特性
在水力發電系統中,用戶端負荷的不斷變化會導致水輪機發電機組頻率的不穩定,從而影響供電的質量和安全。這就要求水輪機控制系統具有良好的動態特性,使水輪機在受到負荷擾動后快速恢復到穩定狀態[1]。水輪機調節系統動態特性的好壞主要取決于水輪機調速器的控制規律及參數,因此,調速器參數的選取極其重要。若進行現場試驗需耗費大量人力、物力,且很難改變實驗參數;而采用計算機仿真技術則具有經濟、高效、直觀的優點,已被廣泛應用[2]。
Matlab是目前計算機仿真技術中非常有效和實用的工具之一,Matlab中的Simulink不需要復雜的程序代碼,系統的仿真模型可視、直觀,且可以十分方便地改變模塊和仿真參數[3-7]。在Simulink中有多種非線性模塊,能夠適用水輪機調速系統中非線性控制環節[8-10]。筆者在Simulink環境中,通過改變調速器參數及某些被控對象參數進行仿真實驗,觀察負荷擾動工況下系統的動態變化,根據仿真結果詳細分析了參數取值變換對系統性能的影響。將Simulink用于水輪機調速系統實驗教學,能讓學生更快熟悉整個系統的結構及系統控制原理,獲得詳細、直觀的實驗波形圖及數據,使學生對系統動態過渡過程有更直觀的理解與掌握。
1 水輪機調節系統模型
水輪機調節系統是一個綜合水輪機水流特性、機械特性和電氣特性,其被控對象具有非線性及變結構、變參數等特性的非最小相位系統[11]。本文采用典型的具有較短水渠、剛性水擊等特性的水輪機調速系統模型作為實驗對象,其數學模型框圖如圖1所示。

圖1 水輪機調速系統數學模型框圖
由于PID控制結構簡單、穩定性好且容易實現,因而在工程控制系統中被廣泛采用。本文采用的是并聯PID調速器。如果能夠找到適當的調速器參數組合,可以在一定程度上實現水輪機的最優控制[12-13]。如圖1所示,控制器輸出信號為比例部分、積分部分和微分部分三者之和,其表達式如下:
(1)
式中,KP、KI、KD分別為增益系數,S為拉普拉斯算子,Tn為微分時間常數(單位為s)。
在數學模型建立過程中,忽略一些非線性環節,則調速器控制信號yPID和接力器行程信號y之間的關系可用下式來表示[11]:
(2)
當機組導葉開度快速改變時(如導葉開度快速減小),由于水流的慣性作用,流入轉輪的水流速度隨開度的減小而增大,從而會使得水輪機轉矩增大。考慮到這種現象,筆者在數學模型中引入了水輪機流量對轉速的傳遞系數eqx。
水輪機將接力器行程信號y作為輸入,將水輪機主動力轉矩mt作為輸出,在所研究的負荷擾動小波動工況下,水輪機的數學模型可表示如下[11]:
(3)
式中,ey,ex,eh,eqy,eqx,eqh均為水輪機傳遞系數,qt、ht分別為機組流量與有壓引水管道水壓增量的相對值。
在該負荷擾動小波動下,可以認為水和引水系統管壁均為剛性的,此時引水系統特性可表示為:
(4)
式中,Tw為水流慣性時間常數(s)。
當系統處于負荷擾動工況下,發電機組及負荷擾動量的動態方程可表示如下[11]:
(5)
其中,Ta為機組慣性時間常數(s),en為被控系統自調節系數,GD2為發電機負荷轉矩(kN·m2),Pr為發電機額定功率輸出(kW)。
2 水輪機調節系統Simulink仿真模塊
在Simulink環境中建立水輪機調節系統仿真模塊時,可對系統中一些非線性因素予以考慮,從而增強系統模型的準確性。在Simulink環境下構建的控制系統及被控對象子系統的仿真模塊如圖2所示,其中控制系統包括并聯PID控制器以及含有非線性死區環節和飽和環節的電液隨動系統(見圖2(a)),被控對象則包括含剛性水錘的水輪機系統及一階發電機系統(見圖2(b))。
在負荷擾動工況下,系統總輸入端輸入信號為0,即K1接到0端;在負荷端輸入5%的額定負荷擾動量,即K2接到階躍信號端。分別改變不同的參數數值,觀察系統隨之而發生的變化情況。

圖2 水輪機調速系統仿真模塊
3 負荷擾動仿真實驗及結果分析
水輪機調速系統負荷擾動動態特性試驗是實際工程中必須進行的重要試驗,它關系到水輪發電機組運行安全及電能質量。筆者在Matlab/Simulink仿真環境中,根據建立的水輪機調速系統數學模型搭建仿真模塊,在5%負荷擾動工況下,改變調速器參數及被控對象,如機組慣性時間常數Ta、被控系統自調節系數en的參數數值,在20 s的仿真時間內,來觀察系統動態變化過程,根據仿真數據及仿真圖形進行具體分析。基本實驗數據如表1所示。

表1 基本實驗數據
在表2中,Case 1中調速器參數來自一種改進模糊粒子群算法整定后的結果,而Case 2—Case 7為在Case 1的基礎上分別改變KP、KD、KI數值的仿真案例。表2中所有的案例,Ta=5.72 s,en=0.8771。
表3中所設的案例為改變機組慣性時間常數Ta和被控系統自調節系數en的仿真實驗,所有的案例,其調速器參數均采用Case 1中的數據。
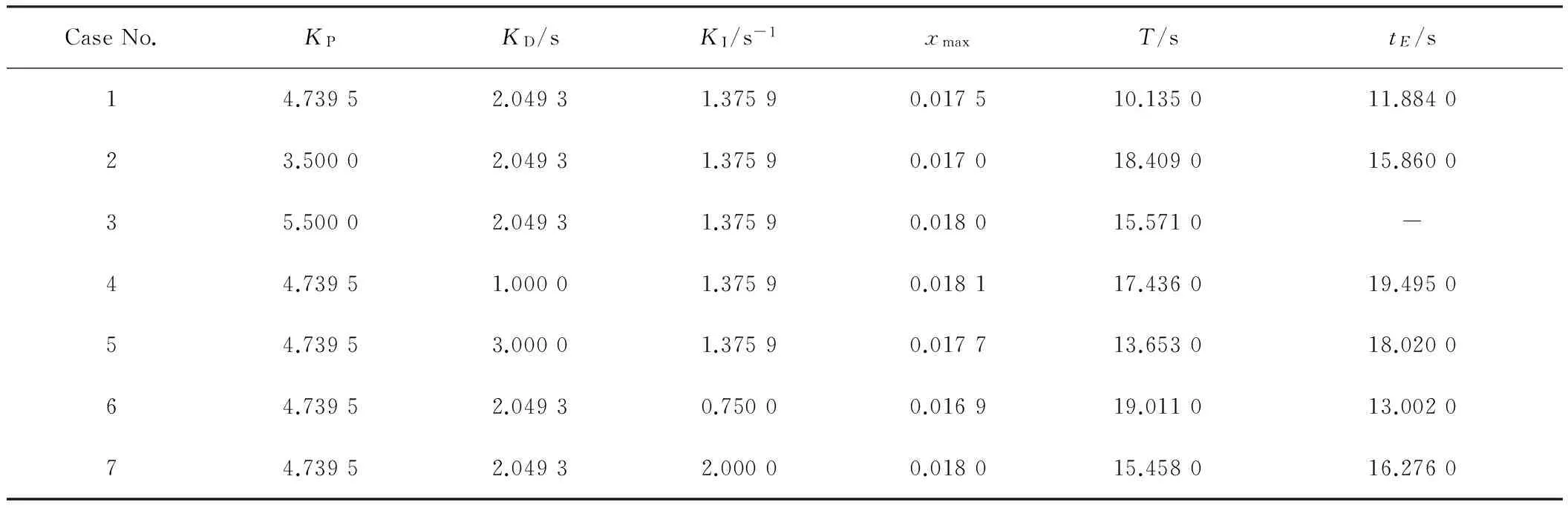
表2 不同PID參數取值的仿真結果

表3 不同被控系統參數取值的仿真結果
圖3所示分別為KP數值改變時系統轉速相對偏差及接力器行程相對偏差的過渡過程,橫坐標均為實驗仿真時間(單位為s)。從圖中可以看出,經過參數優化后的調速器(Case 1)對系統性能控制良好,當受到負荷擾動后,系統能較為迅速地響應,向穩定值恢復的速度也較快,系統轉速相對偏差最大值xmax為0.017 5,轉速調節穩定時間T=10.135 0 s,接力器行程穩定時間tE=11.884 0 s。當KP取值較小時(Case 2),雖然系統超調量有略微減小,但向穩定值恢復的速度極為緩慢。當KP取值較大時(Case 3),系統動態響應過程極不穩定,出現了較為嚴重的振蕩現象,并且接力器開度在仿真時間內都很難達到穩定。

圖3 改變KP數值的仿真結果
從圖4可以看出,當KD取值過小(Case 4)和過大(Case 5)時,系統均會出現振蕩現象,并且系統超調量都會增大,系統調節穩定時間比較長。
從圖5可以看出,相對KP和KD參數來說,積分增益KI的取值對系統性能影響較小。當KI較小時(Case 6),系統向穩定值恢復的速度極為緩慢;而當其取值較大時(Case 7),系統超調量有所增大,穩定時間也增加。
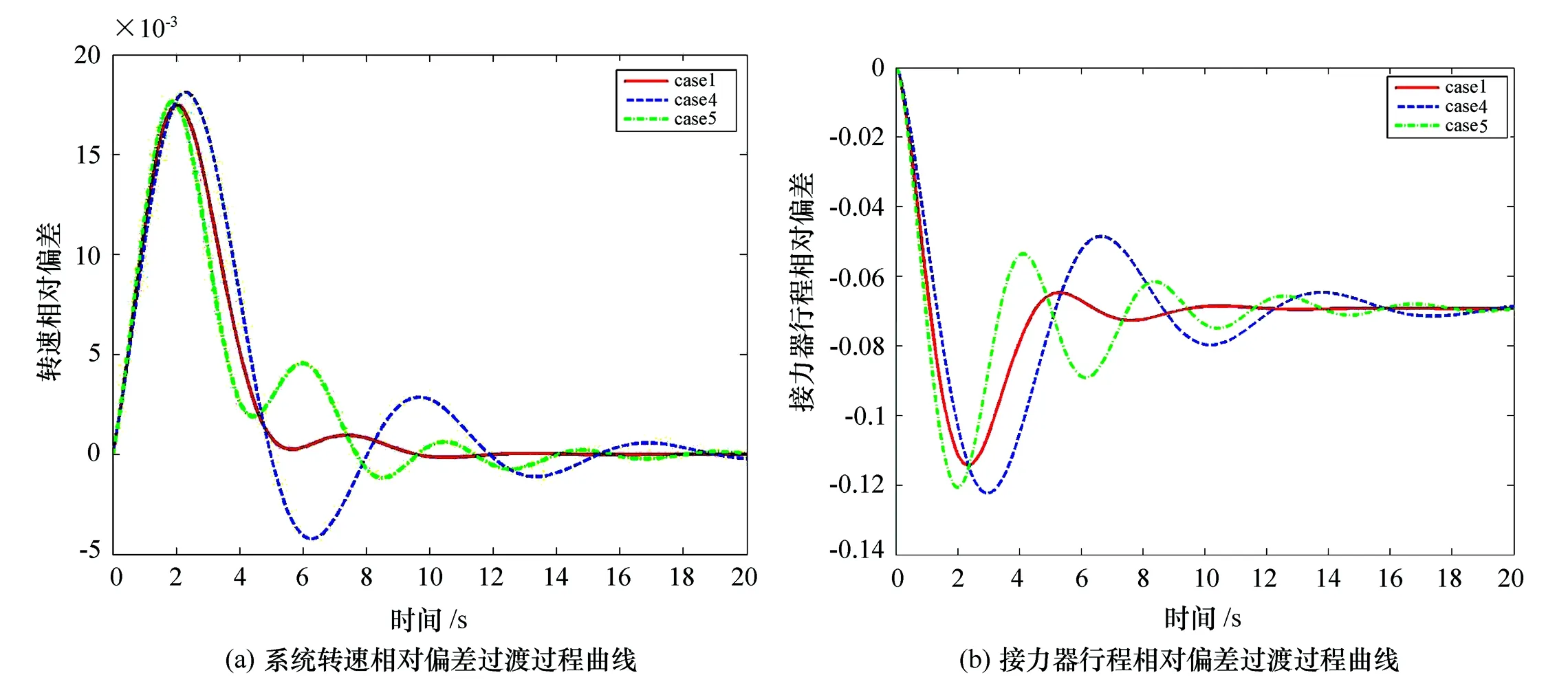
圖4 改變KD數值的仿真結果

圖5 改變KI數值的仿真結果
如圖6所示,當Ta減小時(Case 8),系統超調量增大,響應過程極不穩定,系統出現振蕩現象,當Ta較大時(Case 9),雖然超調量有所減小,但是系統穩定時間大大增加。
如圖7所示,當en取值較小時(Case 10),系統超調量增大,而當en取值較大時(Case 11),系統極不穩定,出現較嚴重的振蕩現象。并且在這2個Case中,系統穩定時間都相當長,在仿真時間內都很難達到穩定狀態。

圖6 改變Ta數值的仿真結果
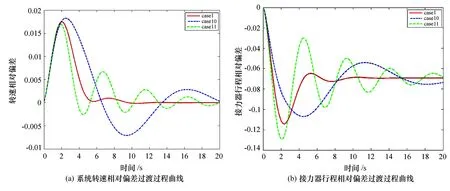
圖7 改變en數值的仿真結果
4 結束語
根據對典型的具有較短水渠和剛性水擊特性的水輪機調速系統數學模型的分析,在Matlab/Simulink環境下建立了相應的仿真模塊,在5%負荷擾動下,分別改變調速器參數、機組慣性時間常數Ta和被控系統自調節系數en。仿真結果表明,系統參數數值改變對系統性能影響很大,而合適的參數組合能使系統擁有良好的動態特性,在一定程度上實現最優控制。
筆者將Simulink仿真技術引入課程教學,激發了學生的學習興趣,提高了教學效率。仿真實驗結果中豐富、直觀的圖形及數據,使學生對系統的動態過渡過程有充分理解,對參數變化而引起的水輪機調速系統性能的改變有了更進一步認識。
References)
[1] Gonggui Chen,Lilan Liu,Peizhu Song,et al.Chaotic improved PSO-based multi-objective optimization for minimization of power losses and L index in power systems[J].Energy Conversion and Management,2014,86:548-560.
[2] 魏守平.水輪機調節系統的空載特性仿真[J].水電自動化與大壩監測,2009,33(5):20-25.
[3] 許允之,劉昊,馮宇,等.Matlab在電力系統仿真實驗中的應用[J].實驗技術與管理,2007,24(1):103-105,125.
[4] 結碩,韓光勝.Matlab在自動控制原理實驗中的應用[J].實驗技術與管理,2012,29(2):95-97,108.
[5] 薛定宇.基于MATLAB/Simulink的系統仿真技術與應用[M].北京:清華大學出版社,2011.
[6] 魏偉.基于SIMULINK異步電機矢量控制仿真實驗研究[J].實驗技術與管理,2009,26(1):71-73,77.
[7] 高仕紅.基于Matlab的異步電動機工作特性的研究[J].電氣電子教學學報,2010,32(4):40-42,54.
[8] 唐昆,王平軍,武衛.基于Simulink的舵機伺服系統非線性建模與仿真[J].微計算機信息,2010(22):139-141.
[9] 李建海,皮之軍,張晨亮,等.Matlab/Simulink仿真技術在電機實驗教學中的應用[J].實驗技術與管理,2011,28(8):79-82.
[10] FangHongqing,Chen Long,Nkosinathi Dlakavu,et al. Basic modeling and simulink tool for analysis of hydraulic transients in hydroelectric power plants[J]. Energy Conversion,IEEE Transactions on,2008,23(3):834-841.
[11] 魏守平.水輪機調節系統仿真[M].武漢:華中科技大學出版社,2011:1-142.
[12] ChenGonggui,Du Yangwei,Song Peizhu. Parameter optimization of hydro turbine governor PID controller by chaotic improved PSO algorithm[J].Energy Education and Technology Part A: Energy Science and Research. 2014,32(5):3949-3962.
[13] 王釗,陳真.基于Simulink的PID控制器設計[J].實驗技術與管理,2007,24(5):70-72.
Study on dynamic simulation of resisting load disturbance for water turbine governing system
Chen Gonggui1, Du Yangwei1, Guo Yanyan2, Tang Xianlun1
(1. Research Center on Complex Power System Analysis and Control,Chongqing University of Posts andTelecommunications,Chongqing 400065,China;2. Department of Locomotive and Vehicle Engineering,Wuhan Railway Vocational College of Technology,Wuhan 430205,China)
The simulation experiment research is conducted on the complex nonlinear water turbine governing system under load disturbance condition. The mathematical model is set up in the Simulink environment,and the experiments of adjusting for the systems with different parameters of governor and controlled system are carried out. The experimental results indicate that the parameters selection determines the performance of the system dynamic characteristics and the suitable parameter combination can make the system obtain the optimal dynamic performance to a certain extent. By the Simulink experiments,the students can not only improve the ability of the simulation,but also grasp the structure and properties of turbine governing system further.
water turbine governing system; simulation; Simulink; load disturbance; dynamic characteristics
2014- 11- 10 修改日期:2015- 01- 06
重慶郵電大學教育教學改革項目(XJG1416);重慶市高等教育教學改革研究重點項目(132016)
陳功貴(1964—),男,重慶,博士,教授,主要從事電氣工程專業的教學和科研工作.
E-mail:chenggpower@126.com
TM612; G434
A
1002-4956(2015)6- 0097- 05
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
工業設計(2022年8期)2022-09-09 07:43:20
中學生數理化·中考版(2022年11期)2022-02-16 07:01:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
發明與創新(2016年38期)2016-08-22 03:02:52