激光跟蹤儀相位法絕對測距研究與設計
2015-03-27 03:01:54劉嬌月楊聚慶紀榮祎
實驗技術與管理 2015年6期
劉嬌月, 楊聚慶, 紀榮祎
(1. 河南工業職業技術學院, 河南 南陽 473009; 2. 北京工業大學 應用數理學院, 北京 100124;3. 中國科學院光電研究院, 北京 100094)
激光跟蹤儀相位法絕對測距研究與設計
劉嬌月1, 楊聚慶2,3, 紀榮祎3
(1. 河南工業職業技術學院, 河南 南陽 473009; 2. 北京工業大學 應用數理學院, 北京 100124;3. 中國科學院光電研究院, 北京 100094)
基于激光跟蹤儀對絕對測距的技術要求,敘述了系統的測量原理,設計了激光相位法測距的激光跟蹤儀ADM單元。闡述了基于混頻、外差探測和相位測量的差頻鑒相式激光測距系統總體設計方案和相關技術,構建了信號發射和接收測量總體系統構架,對信號模塊、硬件電路實現和器件選用做了具體描述。進行了系統調試及相關測量實驗,結果表明該激光絕對測距單元達到了儀器整體設計指標要求。
激光跟蹤儀; 絕對測距; 混頻; 差頻; 相位測量
激光跟蹤儀主要用于大尺寸目標工件的尺寸和形位誤差測量,為大型部件的裝配和檢驗提供實時測量基準,在大型工程安裝檢測、大型裝備建造、航空航天、船舶、汽車、軌道鋪設等零部件檢測和裝配過程中具有非常高的應用價值[1]。一般激光跟蹤儀采用激光干涉法對空間點坐標的距離進行精確測量,但在測量過程中,由于測量靶標的隨動特性以及光束被擋、跟蹤系統瞬時失靈等原因,激光跟蹤干涉測量會產生斷光現象。激光干涉法屬于增量式相對測量,一旦中斷,系統將不能繼續跟蹤目標,只能重新進行測量[2]。因此,在激光跟蹤儀設計中一般還要同時配置絕對距離測量系統(ADM),在斷光瞬間快速切換,提供基準距離測量數據,保證激光干涉測量系統(IFM)恢復正常工作,實現斷光續接[3]。
常用激光ADM技術包括脈沖測距與相位測距兩種。激光脈沖測距是通過發射周期性脈沖,測量激光脈沖往返被測目標所需時間差進行測距。激光脈沖測距主要用于中遠程快速距離測量,受激光發射系統和接收系統帶寬、脈沖寬度和脈沖激光大氣衰減等影響,其精度最高以厘米級為主,不能滿足本系統續接測量精度要求。激光相位法測距是通過對激光束進行幅度調制并測定調制光往返測線產生的相位延遲,間接測量目標距離。測量精度可以達到亞毫米級,具有測量精度高、速度快、測量范圍廣等優點[4-5],適合于作為激光干涉測量基準位置的斷光續接測量。
本課題依托激光跟蹤儀樣機(中科院光電研究院研制),對激光ADM絕對測距單元進行技術研究與應用設計。采用級聯式PLL(鎖相環)高穩定頻差技術、差頻數字鑒相技術和全相位傅里葉變換法,進行高、低雙頻測量、差頻數字處理和相位差測量,實現高精度數字相位法絕對測距。
1 激光測距原理與測相方法
1.1 激光相位測距原理
激光相位測距以測量被調制的激光信號在待測距離d上往返傳播所形成的相移Δφ來獲得激光的飛行時間,從而獲得距離信息,基本原理見圖1。

圖1 相位測距基本原理示意圖
用調制頻率f對發射激光幅值調制,則激光光束經過距離為d的目標反射后信號的相位變化為:
式中C為光速。
由于相位位移是以2π為周期變化的,相移測量時,相位變化的整周期數是無法確定的,利用上式解算距離值時存在模糊多解問題。為解決這一問題,可選擇較低的調制頻率,使調制周期大于激光在待測距離d上的往返時間td,使激光信號在待測距離上往返傳播形成的相移小于2π,因此不存在模糊多解的非模糊距離nar應滿足[6-7]:
相位測距的距離分辨率由相位分辨率決定:
由上式可知,當系統測相誤差不變時,調制頻率越低,測距誤差越大。為了達到既能測長距離,又有較高測距精度的要求,可以采用雙頻調制信號進行測量。測距時,可以先用較低的頻率進行粗測,然后用較高的頻率進行精測,最后將2個測量結果結合得到最終測量距離。其中,低頻保證測距系統的測程,高頻保證測距精度,解決了測距精度和測程間的矛盾。
1.2 差頻測相的外差探測方法
由于測距信號頻率高,在數字處理時誤差較大,為此系統設計引入混頻環節,采用參考信號和測量信號差頻處理的外差探測方法,以取下變頻的方式降低待測相位差信號頻率,進行低頻信號相位測量。降頻后,相位信息不變,信號周期擴大,相位測量分辨率提高,從而提高測距精度[8]。
設激光發射信號為Se(t)=Ecos(ω1t),光返回信號為Sr(t)=αEcos(ω1t+φd),參考光信號為Sl(t)=αEcos(ω2t+ψ)。
分別將光發射信號、光返回信號與參考信號進行混頻,可以得到以下2個信號:
設ω1=ω2+ωm,ωm較小。Xref、Xmes通過低通濾波器后得:
式中:E為信號幅值,φd為相位差,ψ為參考光信號初相,α為衰減系數。信號Ymes和Yref之間的相位位移φd就是測距要測量的相差。外差相位測量的原理見圖2。

圖2 外差探測原理
2 激光跟蹤儀ADM單元設計分析
2.1 總體設計
激光跟蹤儀樣機設計指標:ADM測程最大為35 m,測距精度300 μm,測距分辨率為5 μm。由測程和測距精度要求,考慮到粗測和精測2個頻率差較大時鎖相環控制方便,回波濾波放大電路相互間干擾較小且容易分離,可同時接收和處理數據,測量速度快,因此采用粗測和精測頻率組合測量方案。同時,考慮到測相誤差引起的測距誤差與調制頻率有關,采用差頻的外差探測法,降低測相信號頻率。對于相同的測相誤差,調制頻率越高相應的測距誤差越小,但增加調制頻率會導致相應的最大不模糊距離降低,調制頻率高對激光調制驅動要求高,相應的接收系統帶寬過寬,不利于后續電路系統設計與實現,接收系統帶寬增加會使電路噪聲和干擾增加,降低信號的信噪比[9]。
綜合上述各種因素,選擇發射頻率分別為4 MHz和1 000 MHz,本振頻率為4.005 MHz和1 000.005 MHz,差頻信號頻率為5 kHz,計數脈沖頻率為300 MHz。測尺頻率為1 GHz,相位差的幅度擴大了20萬倍,用300 MHz的計數時鐘對進行測量,可滿足分辨率的設計要求。使用10 MHz恒溫晶振作為主振蕩器,其頻率穩定度為±0.005 ppm,理想狀態下,它產生的距離抖動為±3 μm,能夠滿足測量精度為300 μm的要求。
ADM測距單元系統組成見圖3,主要由激光調制發射、回波接收調理、信號處理等模塊組成。激光調制發射模塊包括多頻激光調制信號的產生、合成、激光器驅動電路;接收調理模塊主要包括回波信號光電探測、前置及后級放大、濾波混頻;信號處理模塊包括并行 AD、CPLD數據采集與數字測相,接收主控信號并將測量結果傳送給主控單元。采用LVDS差分信號與主控單元通信,LVDS接口具有高速、低功率、抗干擾性能好等特點,在差分 PCB導線對或平衡電纜上傳輸速率可以達到幾百Mbit/s,甚至上Gbps,總傳輸時間不大于100 μs。
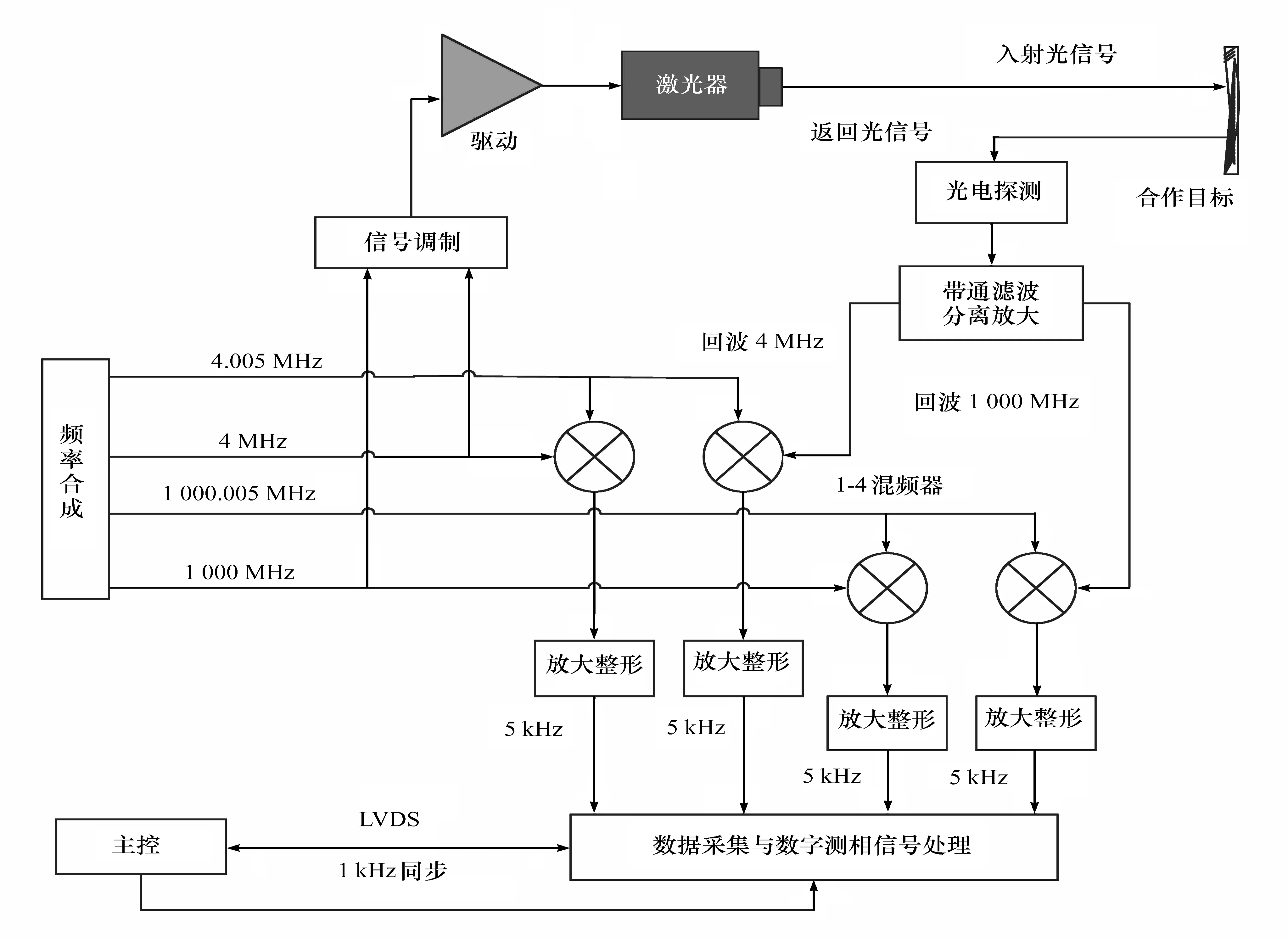
圖3 激光相位測距系統框圖
此外,系統還包括激光光束的準直、共光路和分光路。激光跟蹤儀跟蹤單元與ADM單元共用探測和返回光路。為了與跟蹤激光器發射的632 nm激光有效分束,相位測距激光器選擇與632 nm相差較大的1 550 nm通信波長,同時滿足高頻調制要求。選用Bookham的LC25W-A帶尾纖輸出半導體激光器,其調制頻率最高可達2.5 GHz,最大輸出功率可達10 mW,且集成TEC和熱敏電阻,便于進行溫度控制。LC25W-A纖芯9 μm,數值孔徑NA=0.14。準直器選用美國THORLABS公司的F810APC-1550,其焦距為37.13 mm,數值孔徑為0.24。
混頻器將攜帶相位信息的發射信號和回波信號分別與本振信號混頻,實現將發射信號和回波信號的相位信息搬移到中頻上,進行外差探測。設計4路混頻器:混頻器1為回波信號1 000 MHz和本振1 000.005 MHz混頻;混頻器2為發射信號1 000 MHz和本振1 000.005 MHz混頻;混頻器3為回波信號4 MHz和本振4.005 MHz混頻;混頻器4為發射信號4 MHz和本振4.005 MHz混頻。經過混頻后的信號為正弦信號,采用LM293作為波形轉換器將正弦信號轉換成方波信號,以便后續數字電路進行相位差計算。
2.2 頻率合成
采用鎖相環進行頻率合成,獲得穩定且頻率相差5 kHz的頻率信號。基本的鎖相環電路框圖(見圖4)由鑒相器、環路濾波器及壓控振蕩器組成。利用2個電信號的相位誤差,通過環路自身的調整,實現頻率的鎖定。加入分頻器M及倍頻器N,使輸出頻率在一定范圍內可調并鎖定。

圖4 鎖相環原理框圖
鎖相環輸出頻率為
式中,M為分頻器分頻次數,N為倍頻器倍頻次數。
設計使用CDCE706全數字鎖相環電路芯片頻率合成,一個輸入參考時鐘就可以輸出6路完全獨立的設計時鐘信號。其輸入參考時鐘既可以是LVCOMS信號,也可以是差分信號,并通過SMBus總線的數據接口進行選擇。CDCE706集成鑒相器、環路濾波器以及壓控振蕩器在一個芯片,每一個PLL的分頻器M可設置為1~511間的任意值,倍頻器N可設置為1~4095間任意值[10]。
從鎖相環得到的頻率信號為方波信號,而后續電路需要處理的均為正弦波信號,因此需要設計濾波器濾除方波中的奇次諧波信號。考慮到所需設計的濾波器只對衰減特性有要求,選用七階切比雪夫型濾波器(chebyshev filter)。其特點是通帶內衰減特性具有等波紋起伏,截止特性陡峭。因為需要得到的是正弦波,因此波紋起伏不會引起波形的失真。
2.3 激光信號發射、調制與接收
設計將1 000 MHz和4 MHz信號同時加在激光器上,在接收端用濾波器將其分開。驅動器的輸入信號是1 000 MHz和4 MHz直接相加的信號,功率驅動晶體管選用寬帶寬的微波管2N5109、2N5109和2N3904,對1 000 MHz和4 MHz信號進行緩沖及隔離作用。其中2N5109和2N3904的截止頻率本別是1.2G Hz和300 MHz,能很好地起到信號隔離和電流放大作用,輸入阻抗高,對信號源影響很小;而輸出阻抗低,可以減小負載變動對電壓增益的影響。
光電接收電路由PIN光電二極管、RC濾波網絡和兩級放大組成。返回光波被會聚到光電二極管PIN上。PIN光電流的大小隨測距光波而變化,獲得與測距光波頻率變化規律相同的電壓信號。光電探測器選用日本濱松公司G6854-01型InGaAs PIN光電探測器,峰值波長為1 550 nm,峰值響應率0.95 A/W。PIN光電二極管采用負偏壓工作方式,一端接地,一端接反向電壓。
2.4 數字測量相差
精測和粗測得到的信號經LM293整形后,得到四路占空比1∶1的方波信號。1 000 MHz發射信號和1 000.005 MHz本振信號經混頻、濾波、整形后的5 kHz中頻信號,記做“S1000M”;1 000 MHz回波信號和1 000.005 MHz本振信號經混頻、濾波、整形后的5 kHz中頻信號,記做“R1000M”;4 MHz發射信號和4.005 MHz本振信號經混頻、濾波、整形后的5 kHz中頻信號,記做“S4M”;4 MHz回波信號和4.005 MHz本振信號經過混頻、濾波、整形后的5 kHz中頻信號,記做“R4M”。數字測量相差原理見圖5。

圖5 數字測相原理圖
其中,R1000M方波或R4M方波的下降沿滯后S1000M方波或S4M方波的下降沿多少,代表了精測信號或粗測信號在測量距離上非整周期的相位差的多少。所以,數字法測量相位差的過程就是測量R1000M下降沿滯后S1000M下降沿的時間過程和測量R4M下降沿滯后S4M下降沿的時間過程。采用自動數字鑒相法進行信號相差的計算,采樣頻率為300 MHz。由于參考信號和測量信號為同頻、同相信號,則分別與本振信號混頻后經相差檢測,原理上各個通道對應相差檢測結果應為 0。當調制頻率增加時,固定相差的標準差有增加的趨勢,這是由于信號串擾造成的,在高頻時串擾的影響尤為明顯。不同頻率測量時產生的通道不匹配相差可作為系統誤差,可在測量結果中進行修正[7-8]。
3 信號測試調整
對ADM測距信號板進行實際信號測試,ADM合成頻率發射信號見圖6,差頻探測信號見圖7。由圖6和圖7可知,經光電轉換、放大及帶通濾波后,得到了穩定的參考信號6(b)和測量信號6(a),且不同調制頻率對應的參考信號和測量信號間分別包含與被測距離相關的相位差,實現了不同頻率接收信號的分離,為高精度激光測距的實現奠定了基礎。
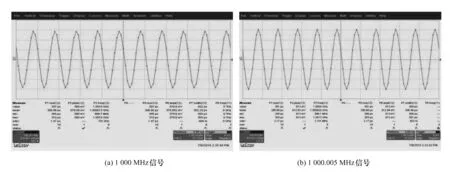
圖6 ADM頻率合成結果
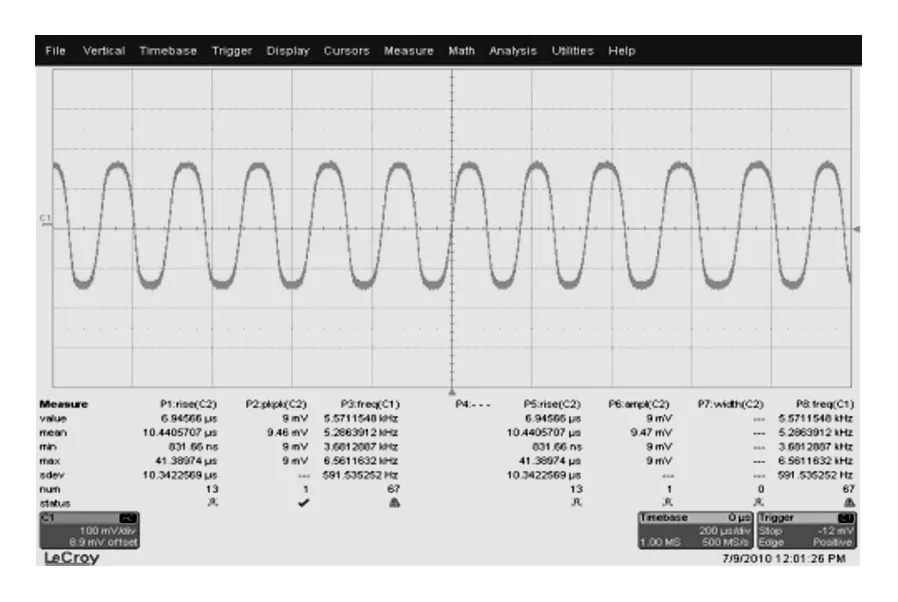
圖7 ADM差頻測量信號5 kHz輸出
進行信號測試時發現以下實際問題并給以解決。
(1) 在LM293過零檢測,將正弦信號變為方波信號的過程中,由于電源或是地電平的不穩定而引起下降沿的抖動,給測量帶來誤差。解決方法:多次測量取平均值。即計算多個測量周期的相差,使插入的計數脈沖成倍增加,再取平均值,可以有效減小電源或是地電平的抖動帶來的測量誤差。
(2) 當測量相差大于0但很接近0或測量相差小于2π又很接近2π時,如果此時脈沖計數器稍有抖動,就很有可能使這兩種情況相互混淆,從而使測量的數據有很大的跳躍,測量結果誤差大且使系統不穩定。解決方法:在CPLD內部將回波信號反相,達到將相位移π的目的。此時,將0或是2π附加的相位移動到π附近,在內部處理數據時把平移的半個周期的脈沖數加上或是減去。
4 實測結果及結論
在近距離測量中,以3 m精密三維電動平移臺為基準。3~35 m遠距離測量中,以激光跟蹤儀干涉測量為基準。分別設置多個方位測量點進行多次測量,測距實驗數據分析結果見表1。測得測量點測距標準差均不超過0.09 mm,表明測量精度達到亞毫米量級,具有較高的測量穩定性和較高的測距精度,該激光絕對測距單元滿足儀器整體設計指標要求。

表1 測距實驗數據分析結果 mm
References)
[1] 周維虎,丁蕾,王亞偉,等.光束平差在激光跟蹤儀系統精度評定中的應用[J].光學精密工程,2012,20(4):851-856.
[2] 周維虎,崔惠絨,丁金濱,等.基于激光跟蹤儀的天基望遠鏡安裝測量技術[J].紅外與激光工程,2008(增刊):250-252.
[3] 劉峰.脈沖半導體激光測距機的研制及應用[J].紅外與激光工程2003,32(2):118-122.
[4] Kalisz J. Review of methods for time interval measurements with picosecond resolution[J].Metrologia,2004,41(1):17-32.
[5] 陳千頌,楊成偉.激光飛行時間測距關鍵技術進展[J].激光與紅外,2002,32(1):7-10.
[6] 魏彪,盛新志.激光原理及應用[M].重慶:重慶大學出版社,2007.
[7] 付有余.激光測距與跟蹤系統低噪聲電子設計方法[J].光學精密工程,2000,8(3):250-251.
[8] 賈方秀.多頻調制的相位法激光測距中若干關鍵技術研究[D].哈爾濱:哈爾濱工業大學,2010.
[9] 唐琴.高線性零中頻混頻器設計[M].南京:東南大學出版社,2008:39-40.
[10] 李勝寅,劉祖深,趙穎.基于 DDS 和外差混頻的頻率合成器的設計[J].電子測量技術,2013,36(4):121-124.
Research and design of absolute distance measurement by using laser tracker’s phase range finding technology
Liu Jiaoyue1, Yang Juqing2,3, Ji Rongyi3
(1. Henan Polytechnical Institute,Nanyang 473009,China;2. Collage of Applied Science,Beijing University of Technology,Beijing 100124,China;3. Academy of Opto-Electronics,Chinese Academy of Sciences,Beijing 100094,China)
Measuring principle of the absolute distance measurement(ADM) system is analyzed and the laser tracker’s ADM unit of laser phase range finding is designed based on its technical requirements.Difference frequency phase laser ranging system’s overall design and related technical analysis are elaborated based on frequency mixing,heterodyne detection and phase measurement, the overall measurement system architecture of signal transmitting and receiving is built, and the implementation of signal modules,hardware circuit and devices’ selection are described in details.System’s debugging and related measuring experiments are carried on. The results show that laser’s absolute distance measurement unit has achieved equipment’s overall design indexes.
laser tracker; absolute distance measurement(ADM);frequency mixing; difference frequency; phase range finding
2014- 12- 14 修改日期:2015- 03- 23
國家重大科學儀器設備開發專項(2011YQ120022);中國科學院科研裝備研制項目(090206A01Y);北京工業大學研究生科技基金項目(ykj-2014-11443)
劉嬌月(1974—),女,河南南陽,碩士,副教授,河南省高等學校青年骨干教師,研究方向為精密儀器、機電一體化技術及應用.
E-mail:15838706952@139.com
TP216
A
1002-4956(2015)6- 0079- 05
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
藝術啟蒙(2018年7期)2018-08-23 09:14:18
電子制作(2018年11期)2018-08-04 03:25:42
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21