一種用于PID 控制參數優(yōu)化的混合果蠅算法*
2015-03-27 07:54:10宋娟
傳感器與微系統(tǒng) 2015年6期
關鍵詞:優(yōu)化
宋 娟
(寧夏大學 物理電氣信息學院,寧夏 銀川750021)
0 引 言
PID 控制是最早發(fā)展起來的控制策略之一[1],但隨著現代工業(yè)系統(tǒng)非線性復雜程度的提高和被控對象不確定性因素的增加,傳統(tǒng)的PID 優(yōu)化方法往往難以達到滿意的控制效果[2]。針對不穩(wěn)定被控對象的PID 控制系統(tǒng),迄今為止,許多智能優(yōu)化技術已經應用于此,例如:遺傳算法(GA)[3]、粒子群優(yōu)化(PSO)算法等[4,5]。相對于GA,PSO算法具有更快的收斂速度[6],但存在易陷入局部極值、運行后期收斂速度變慢等缺陷。
果蠅優(yōu)化算法(fly fruit optimization algorithm,FOA)是新近提出的一種基于果蠅覓食行為尋求全局優(yōu)化的智能優(yōu)化算法[7,8]。相對于標準PSO 算法,FOA 較為適合復雜問題的優(yōu)化求解,但是其應用于非穩(wěn)定對象的PID 控制參數整定目前研究較為少見。通過分析可知,FOA 中果蠅移動的距離與方向較為隨機,導致果蠅味道濃度判定值的表達形式過于單一化和不確切,算法運行后期搜索的盲目性較大、尋優(yōu)結果精度低,從而影響了該算法搜索的質量和效率。
為了彌補FOA 存在的一些缺陷,本文采用分段優(yōu)化的思想,在FOA 優(yōu)化后期引入具有良好收斂特性的PSO 算法,用來優(yōu)化果蠅個體飛行距離和味道濃度判定值,提出一種混合FOA(hybrid FOA,HFOA),實現一類不穩(wěn)定受控對象的PID 控制參數自整定。仿真結果證明:該算法穩(wěn)定性、計算效率和尋優(yōu)精度優(yōu)于標準的FOA 和PSO 算法,應用于PID 控制器參數優(yōu)化效果良好。
1 PID 控制參數的設計
PID 控制器一般形式為

其中,e(t)為系統(tǒng)誤差;u(t)為控制器輸出信號;Kp,Ki和Kd分別為對系統(tǒng)誤差信號及其積分與微分量的加權,控制器通過這樣的加權就可以計算出控制信號,驅動受控對象。如果控制器設計合理,那么控制信號將能朝誤差減小的方向變化,達到控制要求[9]。
采用HFOA 整定PID 控制器參數,必須建立綜合評價各項性能指標的適應度函數,采用ITAE(積分準則)作為系統(tǒng)性能評價函數

選取被控對象為以下不穩(wěn)定系統(tǒng)[10]

在Simulink 環(huán)境建立的仿真模型如圖1 所示。圖中的微分環(huán)節(jié)由一個一階環(huán)節(jié)近似,輸出端口即為式(1)所示的ITAE 指標,通過將時間與誤差絕對值的乘積進行積分后得到。
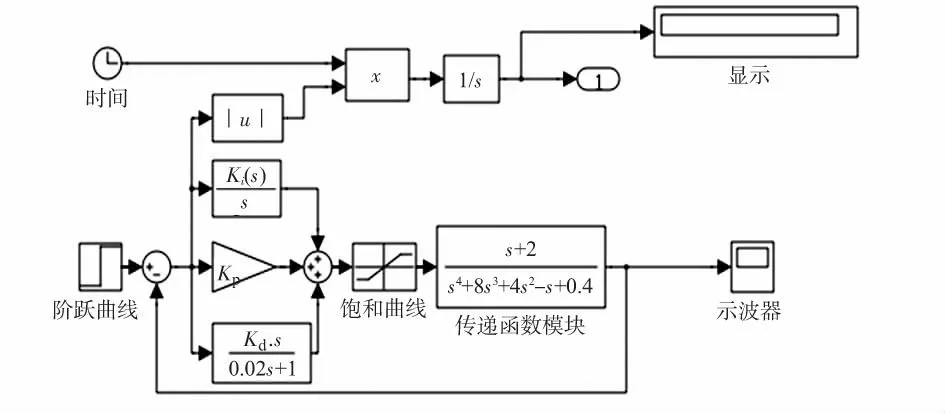
圖1 PID 控制器的SimuLink 模型Fig 1 SimuLink model of PID controller
對于PID 控制器的整定,從優(yōu)化的角度來說,就是在Kp,Ki和Kd這3 個參數中尋找最優(yōu)值,使系統(tǒng)的性能達到最優(yōu),輸出良好的階躍響應曲線。由于面向的是一類不穩(wěn)定被控對象,本文采用時域動態(tài)性能指標(包括調節(jié)時間ts、上升時間tr、峰值時間tp和最大超調量σ%)側重評價系統(tǒng)的動態(tài)性能。
2 FOA 基本原理
FOA 起源于對簡單社會系統(tǒng)的模擬,最初是模擬果蠅覓食的過程,通過群體中個體之間的合作與競爭來對其搜索過程進行指導,從而實現對復雜優(yōu)化問題的求解。
FOA 優(yōu)化流程如圖2 所示。FOA 具有原理簡潔和計算高效等優(yōu)點,較為適合對PID 控制參數進行優(yōu)化。但算法本身果蠅個體飛行距離取值較為隨機,直接影響到味道濃度判定值的表達形式,從而削弱了全局性能和收斂精度。為了提高FOA 優(yōu)化性能,本文考慮引入收斂穩(wěn)定度較好的PSO 算法來改善FOA 的優(yōu)化性能。
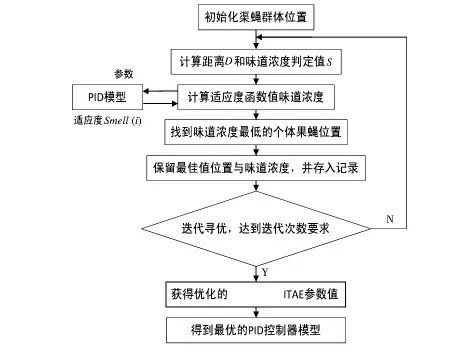
圖2 FOA 算法優(yōu)化流程Fig 2 Flowchart of FOA algorithm
3 HFOA 算法優(yōu)化PID 控制器設計
3.1 POS 算法基本原理
PSO 算法由Eberhert R C 和Kennedy J 于1995 年共同提出,源于對鳥群覓食行為的研究[11~13]。PSO 算法是根據全體粒子和自身的搜索經驗向著最優(yōu)解的方向“飛行”,在進化過程中粒子群多樣性會下降,因此,當算法收斂到一定精度時,無法繼續(xù)優(yōu)化容易陷入局部最優(yōu),造成所能達到的精度較差[13]。
PSO 算法實現由式(4)、式(5)確定

其中,粒子數目i=1,2,…,n;D 維搜索空間d=1,2,…,D;X 表示粒子的位置;V 表示粒子的速度;w 為慣性因子;c1,c2為加速常數;r1,r2為[0,1]區(qū)間的隨機數;Pid為粒子當前搜索到的最優(yōu)位置;Pgd為整個粒子群當前搜索到的最優(yōu)位置。
3.2 HFOA 的優(yōu)化過程
在優(yōu)化過程初期雖然具有較快的收斂品質,但是后期卻往往收斂較慢,或者無法達到要求的精度。為了提高FOA 優(yōu)化PID 控制器的性能,HFOA 采用了分段優(yōu)化的思想,將FOA 與PSO 算法相結合,在合適的時候互相切換,實現二者優(yōu)缺點互補,在提高收斂速度的同時,能適當提高收斂精度,并且還能在一定程度上克服局部極值的問題。
HFOA 整定PID 的基本思想是:在優(yōu)化過程初期,利用FOA 得到果蠅群體最優(yōu)濃度值Smell、味道濃度判定值S 和攜帶最優(yōu)食物濃度果蠅的位置X 和Y;在優(yōu)化過程后期,采用PSO 算法對FOA 中果蠅個體飛行距離和味道濃度判定值進行進一步優(yōu)化,從而利用HFOA 在未知參數Kp,Ki和Kd所有可能取值組合的可行解集合中找出最優(yōu)解,使定義的適應度函數ITAE 最小。
利用HFOA 對PID 控制器的參數進行優(yōu)化步驟如下:
1)隨機初始果蠅個體位置X 和Y,果蠅個體用嗅覺搜尋食物的隨機方向與距離X(i)和Y(i)。
初始化PSO 算法參數:慣性因子w,加速常數c1,c2,粒子速度Vmax,Vmin。
2)計算與原點之間距離D(i),再求出味道濃度判定值S(i)(取距離倒數),形成如下形式的編碼串:S(i)=(Kp,Ki,Kd)。
3)由S(i)代入味道濃度判定函數以求出該果蠅個體位置的味道濃度Smell(i)=Function(S(i))。
4)根據初味道濃度尋找初始極值,利用視覺尋找伙伴聚集味道濃度最低的個體果蠅位置,并保留最佳值初始位置與初始味道濃度
[bestSmell,bestIndex]=min(Smell(i))
X=X(bestIndex,:)
Y=Y(bestIndex,:)
5)令個體最優(yōu)位置Pbest=S,群體最優(yōu)位置Pgbest=S(bestIndex,:),粒子位置Xpos1=S(i),Xpos2=X(i),Xpos3=Y(i);個體最優(yōu)極值fPbest=Smell,群體最優(yōu)極值fPgbest=Smell(bestIndex,:)。
6)更新粒子的位置和速度,按照式(4)和式(5)確定。
7)運行控制系統(tǒng)模型,求出種群中各個體的適應度函數值Smell(i)=Function(S(i))。
8)判斷當前適應值if Smell(i)<fPbest,個體更新操作;if Smell(i)<fPgbest,群體更新操作;更新果蠅最佳位置X 和Y。
9)進人迭代尋優(yōu),重復執(zhí)行步驟(6)~(8),并判斷是否滿足終止條件;否則,退出算法,得到最優(yōu)解。
4 仿真實驗與結果分析
4.1 仿真條件設置
設置FOA 的初始條件如下:最大代數50,種群規(guī)模100。PSO 算法初始條件設置[14]:慣性因子w=0.6,加速常數c1=c2=2,初始化粒子速度范圍[-1,1],Kp,Ki和Kd三個待優(yōu)化參數的搜索范圍均為[0,300],粒子群規(guī)模為100,最大迭代次數為50。控制系統(tǒng)仿真時間0∶10。
4.2 FOA,PSO,HFOA 優(yōu)化性能比較
為了驗證HFOA 優(yōu)化PID 參數的收斂精度和穩(wěn)定性,每種算法連續(xù)在MatLab 7.8a 環(huán)境下運行5 次,圖3(a),(b),(c)為FOA,PSO,HFOA 連續(xù)5 次尋優(yōu)過程。
如圖3(a),(b),(c)所示,FOA 5 次搜索到的最優(yōu)解分別為3.9414,3.9382,5.7635,3.9448,4.18,每次收斂值都不同,說明FOA 在PID 參數優(yōu)化過程中保持探索與開發(fā)平衡的能力較差;HFOA 運行5 次,最終都收斂于最優(yōu)解1.042 4,而PSO 算法運行5 次,只有3 次搜索到最優(yōu)解1.042 4,2 次收斂于局部最優(yōu)解1.085 2。仿真結果表明:HFOA 相對于標準PSO 和FOA 在優(yōu)化PID 控制器上穩(wěn)定性更好,而FOA 收斂全局最優(yōu)的穩(wěn)定度最差;FOA 的收斂精度較PSO 和HFOA 低,表明FOA 運行后期搜索的盲目性較大,較PSO 算法更容易陷入“早熟”。
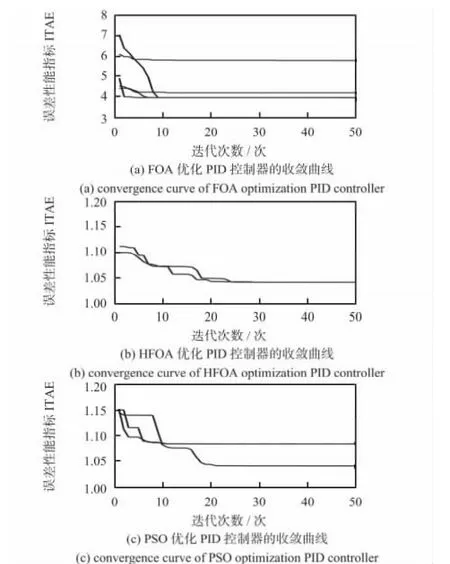
圖3 PID 控制器的ITAE 優(yōu)化曲線Fig 3 Optimization curve of PID controller in ITAE
為了比較FOA,HFOA 和PSO 算法優(yōu)化PID 參數的計算效率、搜索質量和整定后系統(tǒng)的輸出響應,程序分別運行得到一次優(yōu)化結果,設置群體數量100 迭代50 次。計算結果見表1,動態(tài)特性見表2,果蠅群體尋優(yōu)軌跡見圖4,系統(tǒng)仿真輸出見圖5。
由表1 得出,FOA 仿真計算時間為123.939 s,PSO 算法運算時間為209.095 4 s,而HFOA 為119.448 5 s。HFOA 和標準FOA 求解速率上相差不多,較PSO 算法運算量要小很多。這表明HFOA 在PID 參數優(yōu)化計算上效率明顯優(yōu)于標準PSO 算法。
圖4 中橫軸和縱軸沒有具體單位,只是果蠅優(yōu)化飛行路徑坐標變化曲線,這個坐標和尋優(yōu)解(味道濃度判定值)之間是有關系的,得到的飛行路徑實際上是尋找最優(yōu)解S(kp,Ki,Kd)的變化曲線;對比圖4(a),(b),HFOA 相對于FOA 果蠅群體的尋優(yōu)軌跡更加集中,解空間更大,果蠅群體密集度更高。表明HFOA 對解空間探索與開發(fā)平衡的能力較FOA 更強,搜索質量更高。
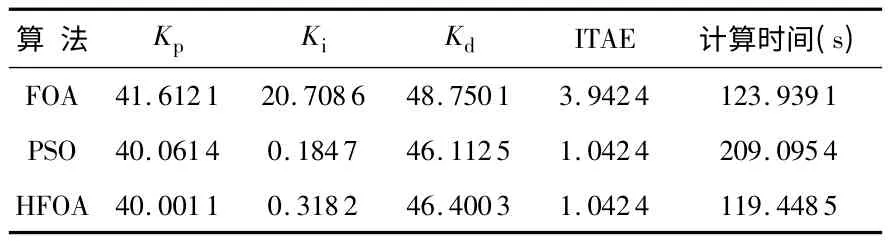
表1 三種算法優(yōu)化PID 的控制參數Tab 1 Optimization PID control parameter of three algorithms

表2 三種算法作用下系統(tǒng)動態(tài)特性比較Tab 2 Comparison of system dynamic characters of three algorithms
FOA,PSO 和HFOA 整定PID 控制器系統(tǒng)的輸出響應曲線見圖5,縱坐標的含義為PID 控制系統(tǒng)在單位階躍輸入信號作用下,系統(tǒng)的動態(tài)響應輸出信號。從圖中可以看出:系統(tǒng)在三種算法作用下,均經過PID 控制器調整后,再經過反饋最終都達到穩(wěn)定狀態(tài)。由表2 得出,采用HFOA 優(yōu)化PID 控制器,系統(tǒng)的超調量σ%和調節(jié)時間ts較FOA 和PSO 算法明顯減少,控制效果更好。
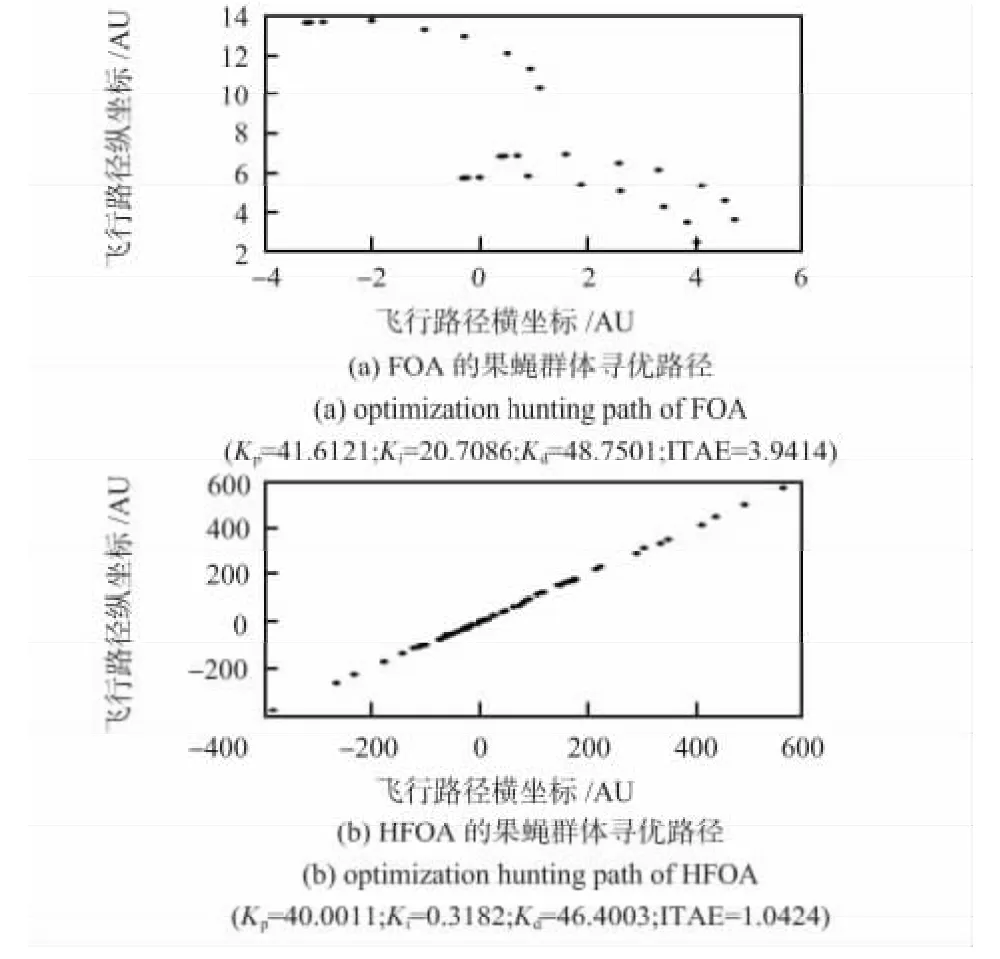
圖4 果蠅群體的尋優(yōu)軌跡Fig 4 Optimization hunting track of fly fruit swarm
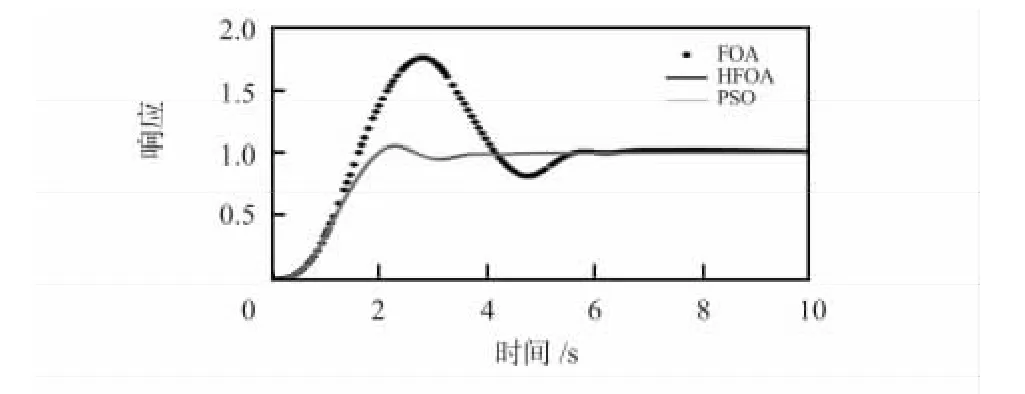
圖5 三種算法優(yōu)化參數的單位階躍響應曲線Fig 5 Unit step response curve of optimization parameter of three algorithms
5 結束語
針對常規(guī)PID 控制方法的不足,通過分析FOA 的優(yōu)化原理,本文提出了一種HFOA 來整定PID 控制參數,獲得了較好的控制效果和收斂特性。HFOA 不僅集成了FOA 計算高效和PSO 算法收斂穩(wěn)定的優(yōu)點,同時可有效地避免FOA和PSO 算法陷入“早熟”。MatLab 仿真結果表明:該算法能較快地搜索到最優(yōu)解,且整定后的PID 控制器調節(jié)時間快、超調量小,具有更好的穩(wěn)定性,系統(tǒng)動態(tài)性能得到較大改善,對于一類不穩(wěn)定控制系統(tǒng)具有良好的控制性能。
[1] Bennett S.Development of the PID controllers[J].IEEE Control Systems Maganize,1993,13(6):58-65.
[2] 劉金棍.先進PID 控制MatLab 仿真[M].北京:電子工業(yè)出版社,2006:161-163.
[3] 方彥軍,易鳳飛,胡文凱.基于遺傳算法的廣義預測PID 控制及其在鍋爐主汽溫系統(tǒng)中的應用[J].武漢大學學報:工學版,2013,46(3):386-392.
[4] 孟 杰,陳慶樟,張 凱.基于粒子群算法的汽車懸架PID 控制仿真[J].計算機仿真,2013,30(4):155-158,168.
[5] 杜文正,謝 政,童國林.基于粒子群優(yōu)化算法的橋式起重機PID 控制參數優(yōu)化[J].計算機測量與控制,2013,21(2):371-373,401.
[6] Eberhart R C,Shi Y H.Comparison between genetic algorithms and particle swarm optimizatnion[C]∥Proceedings of the 7th International Conference on Evolutionary Programming,VII EP’98,San Diego,California,1998:611-616.
[7] 潘文超.果蠅最佳化演算法[M].臺北:滄海書局,2011.
[8] Pan Wen Tsao.A new fruit fly optimization algorithm:Taking the financial distress model as an example[J].Knowledge-Based Systems,2012,26:69-74.
[9] 薛定宇.控制系統(tǒng)仿真與計算機輔助設計[M].2 版.北京:機械工業(yè)出版社,2010:234-235.
[10]薛定宇,陳陽泉.控制數學問題的Matlab 求解[M].北京:清華大學出版社,2007:379-381.
[11]Kennedy J,Eberhart R C.Particle swarm optimization[C]∥IEEE International Conference on Neural Networks,Piscataway,NJ:IEEE Service Center,1995:1942-1948.
[12]Kennedy J,Eberhart R C.A new optimizer using particles swarm theory[C]∥Proceedings of the Sixth International Symposium on Micro Machine and Human Science,Piscataway,NJ:IEEE Service Center,1995:39-43.
[13]鄧 麗,蔣 睛,費敏銳.基于免疫粒子群算法的PID 參數整定與自適應[J].自動化儀表,2013,34(2):65-67,71.
[14]史 峰,王 輝.MatLab 智能算法30 個案例分析[M].北京:北京航空航天大學出版社,2011:133-156.
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
能源工程(2022年1期)2022-03-29 01:06:28
建材發(fā)展導向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
今日農業(yè)(2020年16期)2020-12-14 15:04:59
消費導刊(2018年8期)2018-05-25 13:20:08
家庭影院技術(2018年4期)2018-05-09 07:07:41
電子制作(2017年20期)2017-04-26 06:57:45
