基于Harris 算子的灰度圖像角點檢測方法研究
2015-01-23 01:08:40□趙慧
產業與科技論壇 2015年20期
□趙 慧
隨著計算機應用的發展,數字圖像處理在人們的生活中有了很廣泛的應用。角點是圖像的重要特征,它是圖像灰度局部曲率的極大點,決定了對目標輪廓特征的掌握程度。角點在各種影像特征中有很多優點,例如旋轉不變性、不隨光照變化而變化等。在圖像匹配中,角點也發揮著很大的作用,利用角點特征可以大大提高圖像匹配的速度。另外,角點還可以作為輸入,用于3D 目標跟蹤、3D 建模等領域。由于角點檢測的廣泛應用,角點檢測的研究己成為很多課題的重要環節[1]。本文利用Harris 算法對灰度圖像提取角點,并定性比較了基本的Harris 角點檢測算法和在此基礎上改進的基于散布矩陣的Harris 角點檢測算法的性能。
一、Harris 角點檢測算子原理
角點是灰度變化足夠大的點,人眼對角點的識別通常是在一個小窗口內完成的。當一個窗口在圖像上移動時,窗口內灰度在各個方向上都沒有發生變化,則它在平坦區域,如圖1(a)所示;如果窗口沿某一方向上移動,窗口內灰度發生了較大的變化,而沿另一方向移動,窗口內灰度沒有發生變化,則它有可能在邊緣區域,如圖1(b)所示;如果窗口沿任意方向移動時,窗口內灰度發生明顯的變化,則認為在窗口內遇到了角點,如圖1(c)所示。Harris 算子就是通過這一物理現象,來判斷角點的[2]。

圖1 窗口的移動與角點檢測
將圖像窗口平移[u,v]產生灰度變化E(u,v):

其中w(x,y)是窗口函數,是原像素點的灰度,是平移后像素點的灰度。
根據泰勒公式展開,上式可近似寫為:
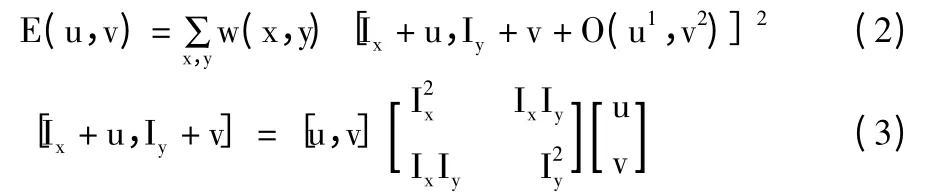
于是對于局部微小的移動量[u,v],可以近似得到下面的表達:

其中實對稱矩陣M 的可表示為:

其中Ix、Iy 分別是I 沿x 和y 方向的一階導數。
圖像灰度的自相關函數在某一點處的曲率極值可用矩陣的特征值λ1、λ2表示。一是兩個特征值都很小且近似相等,即λ1≈λ2≈0,則證明在各個方向上的自相關函數都很小,檢測為平坦區域。二是兩個特征值都很大且近似相等,即λ1≈λ2≥0,則證明在所有方向上的自相關函數都很大,檢測為角點。三是兩個特征值中一個大,一個小,即λ1≥λ2或λ1≤λ2,即自相關函數在某一方向上大,在其他方向上小,則檢測為邊緣。
由于Harris 角點檢測中需要計算圖像灰度的梯度,所以Harris 角點檢測受噪聲影響嚴重,檢測出的角點效果不好。因此,有人提出了基于散布矩陣的角點檢測方法。
散布矩陣的定義如下:
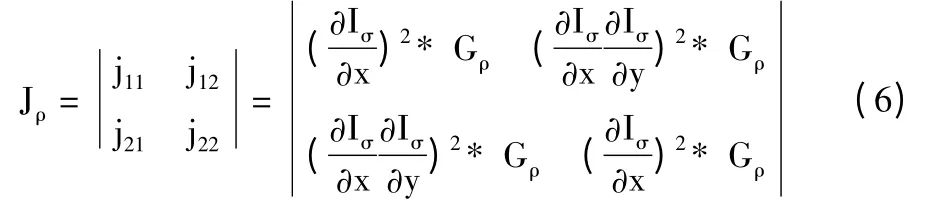
式中Iσ表示以σ 為平滑參數的Gaussian 平滑圖像,Gρ表示以ρ 為參數的Gaussian 核。
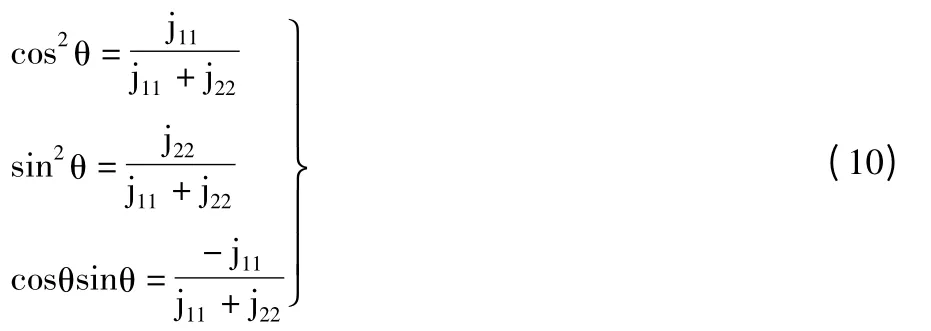
矩陣Jρ有兩個特征向量,它們的方向矢量分別是:

其中代表圖像的梯度方向,即垂直圖像特征的方向;代表沿圖像特征的方向,也就是圖像邊緣的切線方向;是與水平軸的夾角。
由于散布矩陣在對圖像I 求微分前后兩次采取了高斯平滑的手段,通過考慮局部鄰域增強結構方向估計的魯棒性,因而可以有效屏蔽噪聲對角點檢測的影響。邵文澤[3]基于散布矩陣提出了一個角點檢測算子:

其中

因而可以根據散布矩陣,得出(7)和(8)中
二、實驗結果及討論
在無噪、高斯模糊和有高斯噪聲三種情形下,對基于散布矩陣的Harris 角點求取方法進行了實驗,實驗結果如圖2所示。這里沒有對檢測的角點強度圖進行二值化,只給出了角點強度的灰度圖,圖中灰度值越高的點表示此處的角形結構越強。從實驗結果可以看出,由于散布矩陣根據圖像的局部鄰域結構特征識別和確定角形結構,因此該方法的抗噪性好,求取的角點穩定。
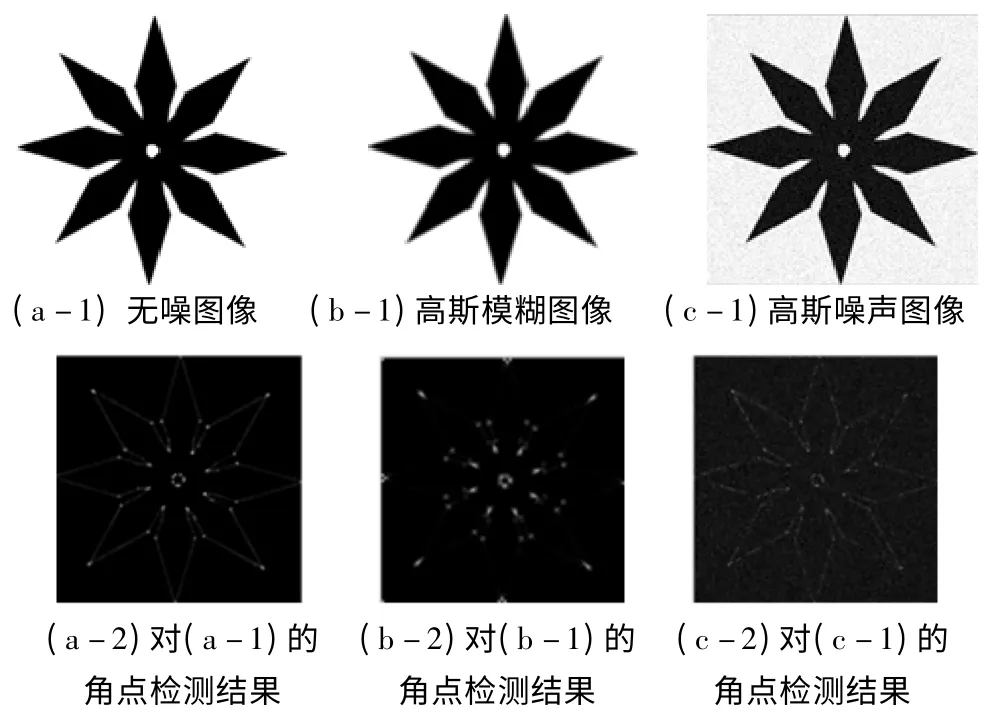
圖2 Harris 算子角點檢測的抗噪性測試結果
三、結語
角點是重要的圖像特征點,角點檢測在各種圖像處理技術中被廣泛應用。本文研究了基本的Harris 角點檢測算法,以及在此基礎上改進的基于散布矩陣的Harris 角點檢測算法。實驗結果表明,基于散布矩陣的Harris 角點檢測算子穩定性更高,抗干擾性強,魯棒性更好。
[1]王玉珠.圖像角點檢測算法研究[D].重慶大學,2007
[2]胡俊.圖像角點檢測方法的研究[D].重慶郵電大學,2011
[3]邵文澤.基于圖像建模理論的多幅圖像正則化超分辨率重建算法研究[D].南京理工大學,2008
猜你喜歡
計算機應用(2022年2期)2022-03-01 12:33:42
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
計算機應用(2021年4期)2021-04-20 14:06:36
計算機應用(2021年1期)2021-01-21 03:22:38
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
當代陜西(2019年10期)2019-06-03 10:12:04
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
海峽科技與產業(2016年3期)2016-05-17 04:32:12