基于區域約束的機場場面目標跟蹤
2015-01-22 09:34:30
雷達科學與技術 2015年6期
(中國電子科技集團公司第三十八研究所,安徽合肥230088)
0 引言
最近20年全球的航空運輸業發展迅速,導致機場內飛機起降次數猛增,如何在有限的空間、多變的天氣條件下管理好越來越多的飛機及相應增加的地服車輛,成為各國機場當局必須考慮的問題。
一方面在一些龐大、復雜的機場,在各種天氣情況下同時有兩三條甚至四條跑道起降來自不同航空公司的客機。同時地面的服務車輛也在不停地穿插運行,因此在實際的運營操作中不可避免地存在飛機、車輛、人員等穿越跑道、滑行道的情況,必須穩定跟蹤所有目標避免交通沖突;另一方面,在一些氣象條件差的機場,目標指揮管制工作十分困難,甚至無從下手,站坪上飛機、車輛的流量受到限制,對于國際性空港的營運來講,站坪指揮工作無疑是一個潛在的瓶頸。
為了解決此類問題,場面監視雷達受到了越來越多的關注,并在國外眾多機場得到了廣泛的應用。場面監視雷達(Surface Movement Radar,SMR)[1-3]區別于其他雷達傳感器的關鍵特征是它的全天候、高轉速(60 r/min)、高分辨率(對機場跑道異物進行監視,包括手提箱)和實孔徑成像,機場目標不是來源于點檢測,回波信號會在距離和方位單元上進行擴展,最終形成一幅移動目標圖像,從圖像中可以提取位置信息和結構信息。
機場場面活動區域包括跑道、滑行道、停機坪、汽車道路等多種類型,在每種區域上目標的速度范圍差別很大,跑道上降落飛機速度會從480 km/h減速到30 km/h,甚至到完全靜止,而汽車的速度最大不能超過40 km/h,如果對飛機和汽車采取相同的目標起始、相關和跟蹤參數,會導致目標波門不合理而起始虛假目標,從而引起目標跟蹤跳動。
文獻[4-5]中對機場場面目標跟蹤采用的自適應卡爾曼濾波或交互多模型方法,僅部分解決了目標濾波問題。本文首先提出了基于區域約束的場面監視雷達目標跟蹤架構,然后介紹了每個跟蹤步驟采取的措施,最后對機場活動區域設置不同的運動限制,在特定區域內采取相應的目標起始、相關和跟蹤濾波準則,最終解決了機場場面復雜場景的活動目標跟蹤問題。
1 場面監視雷達目標跟蹤架構
場面監視雷達與空中管制雷達最大的區別在于:目標的機動特性不同,從高速降落飛機到幾乎靜止的目標,且目標需要在機場不同活動區域間運動,而空中管制雷達只需要跟蹤近似勻速飛行的民航飛機,對目標跟蹤要求較低。為了解決場面監視雷達的目標跟蹤,本文提出了基于區域約束的目標跟蹤處理架構,如圖1所示,主要包括目標提取、點航相關、航跡更新和目標分類、航跡管理等處理模塊,以及機場活動區域、機動目標特性、歷史航跡數據等先驗知識支撐庫。
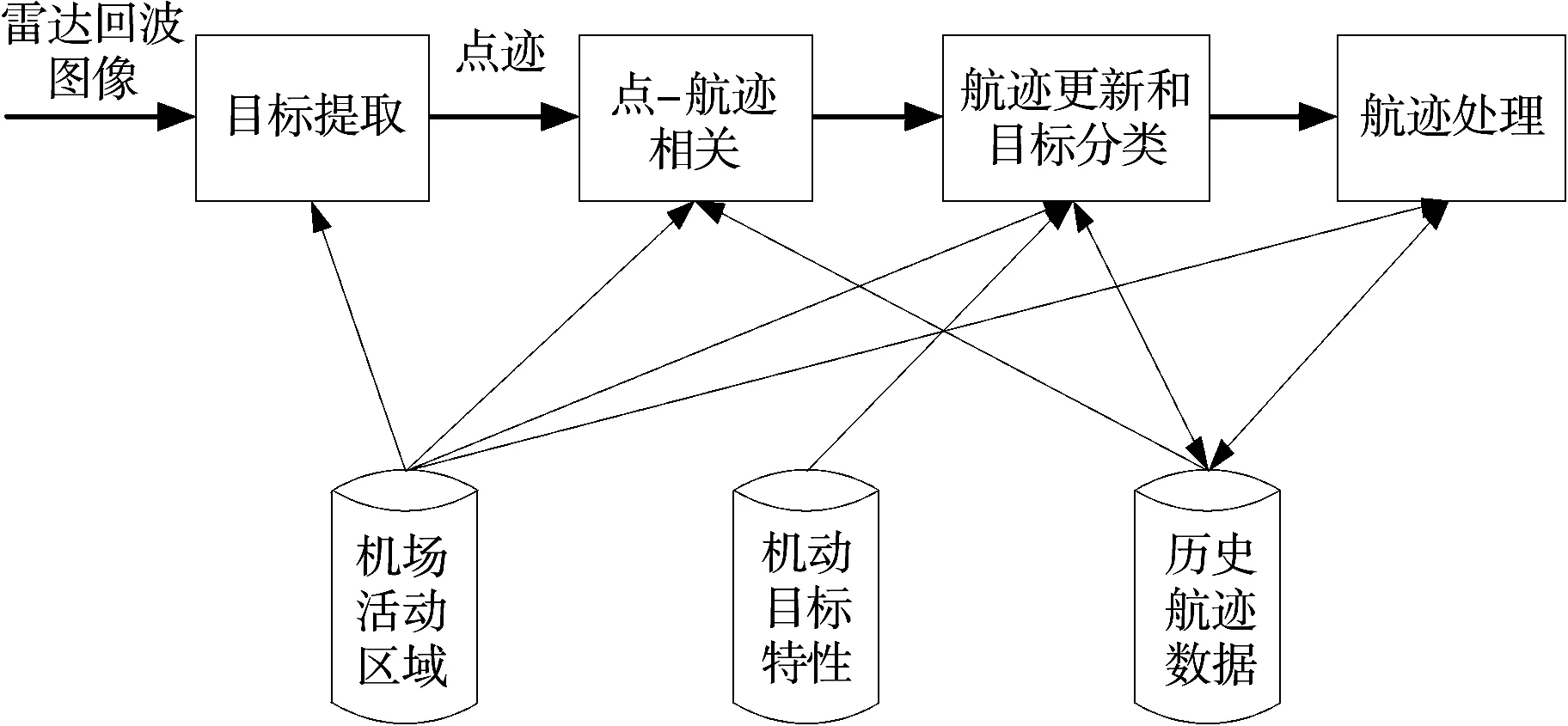
圖1 場面監視雷達目標跟蹤架構
目標提取模塊接收數字化的雷達回波圖像,并對每個提取的擴展目標點ETP獲得相對于跟蹤坐標系的目標位置質心和數據,包括相對于擴展目標質心位置、目標合成形狀的目標特性集合以及測量誤差統計模型、質心位置和特性的誤差協方差矩陣等,具體方法參見文獻[6]。
點航跡相關模塊將每個提取的擴展目標點分配到相應的航跡上。由于場監雷達為一次雷達,無二次信息可用,因此通過最近鄰域方法與已有航跡相關,相關時通過目標所在區域和目標運動特性等知識來動態更新跟蹤波門大小,采用區域約束后通過限制預測點跡位置和波門可提高航跡相關正確率,如跑道上滑行飛機其下一幀應出現在跑道上,在跑道、滑行道連接區域其下一幀只會進入跑道或滑行道,通過這些先驗信息限制可防止多目標的誤相關。
航跡更新模塊負責計算當前航跡狀態向量,包括平滑位置、速度和目標屬性、每個狀態變量的上次更新時間、運動學幅度和特征的濾波誤差協方差矩陣、機動特性/類型。該模塊目標通過綜合所有接收的擴展目標點來獲得位置、運動特性、所有機動屬性的高精度估計、跟蹤機場環境中有關目標的所有運動模式,也是本文的核心內容。
航跡更新模塊的分類功能為每個更新的航跡添加一個包含移動目標的分類標記,能夠區分是地面車輛還是飛機。用于目標分類的主要信息來源是擴展目標點的面積、朝向以及儲存在航跡中的部分運動信息(加速度,轉彎半徑),當沒有目標標識信息可用時,需通過管制員來人工區分航跡類型,歷史航跡數據可作為點航相關、目標分類的學習樣本,分類算法參見文獻[7]。
航跡管理模塊完成航跡起始和丟點航跡刪除。航跡起始時首先判斷目標是否在跑道區域、滑行道和停機坪等活動區域,不在活動區域內的目標進行過濾;然后對跑道區域目標采取2/3起始準則,相關門限按照飛機降落最大速度進行計算,從而使得高速降落飛機能夠快速起始,增大雷達探測威力,對滑行道、停機坪等區域采取4/5準則,相關門限按照滑行最大速度進行計算,更多的起始點數積累能夠降低慢速目標虛假起始概率;對丟點航跡同樣需要判斷目標是否在排隊等待區,如果目標在排隊起飛,雷達無靜止目標點跡,此時則為了保持對滑行-等待-起飛這種運動特性飛機的跟蹤,必須對航跡進行一段時間保持,不能夠刪除航跡,以達到目標的連續跟蹤。
2 機場活動區域設置
為準確估計機場場面活動目標的位置和動態參數,需要根據目標的動態模型來設計相應的濾波平滑算法。機場場面主要關注兩種運動目標:飛機和場面車輛,以及目標的活動區域:跑道、滑行道、停機坪、機場公路等區域,每個區域的速度和加速度限制匯總在表1中。
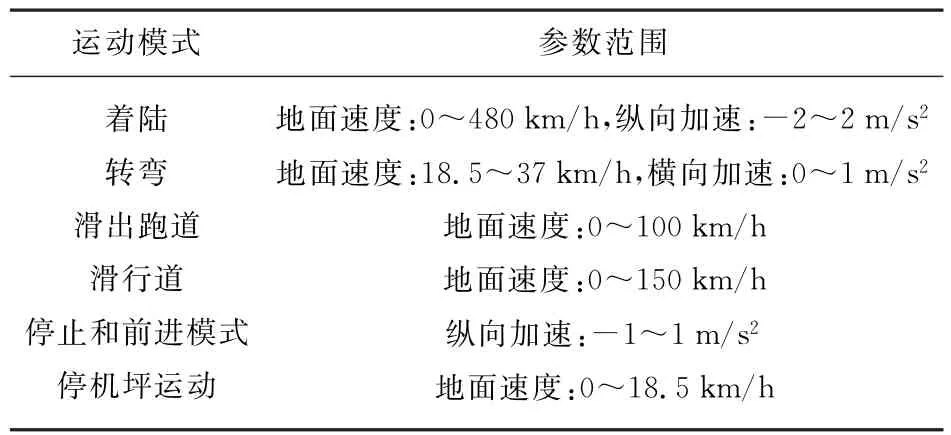
表1 機場活動區域速度限制
描述每個機場活動區域目標加速度的參數可以用來調整航跡跟蹤濾波器的動態模型和跟蹤波門,因此平滑因子可以每次根據移動目標所處的機場區域連續、自適應地調整到期望的可能機動,這將能大幅提高航跡更新的性能。
3 目標平滑濾波
場面監視雷達目標跟蹤數據率通常為1 s,跟蹤過程中每個目標坐標向量包含位置、速度和角速度三個狀態,因此跟蹤狀態向量采用5維設計:目標的加速度作為噪聲向量,跟蹤方程如下:
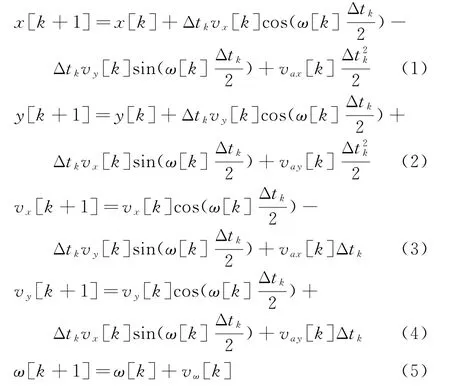
噪聲向量為

該向量將目標可能的隨機加速度作為一個零均值白噪聲向量過程,噪聲協方差矩陣為
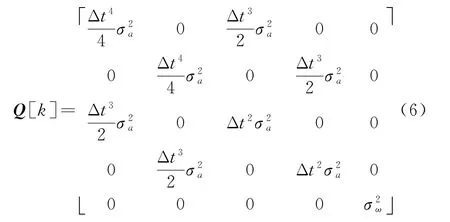
參數σa將機場區域目標運動的最大加速度(amax)考慮在內。目標在某個特定區域時選擇不同的參數值,參數范圍在0.5amax<σa<amax。
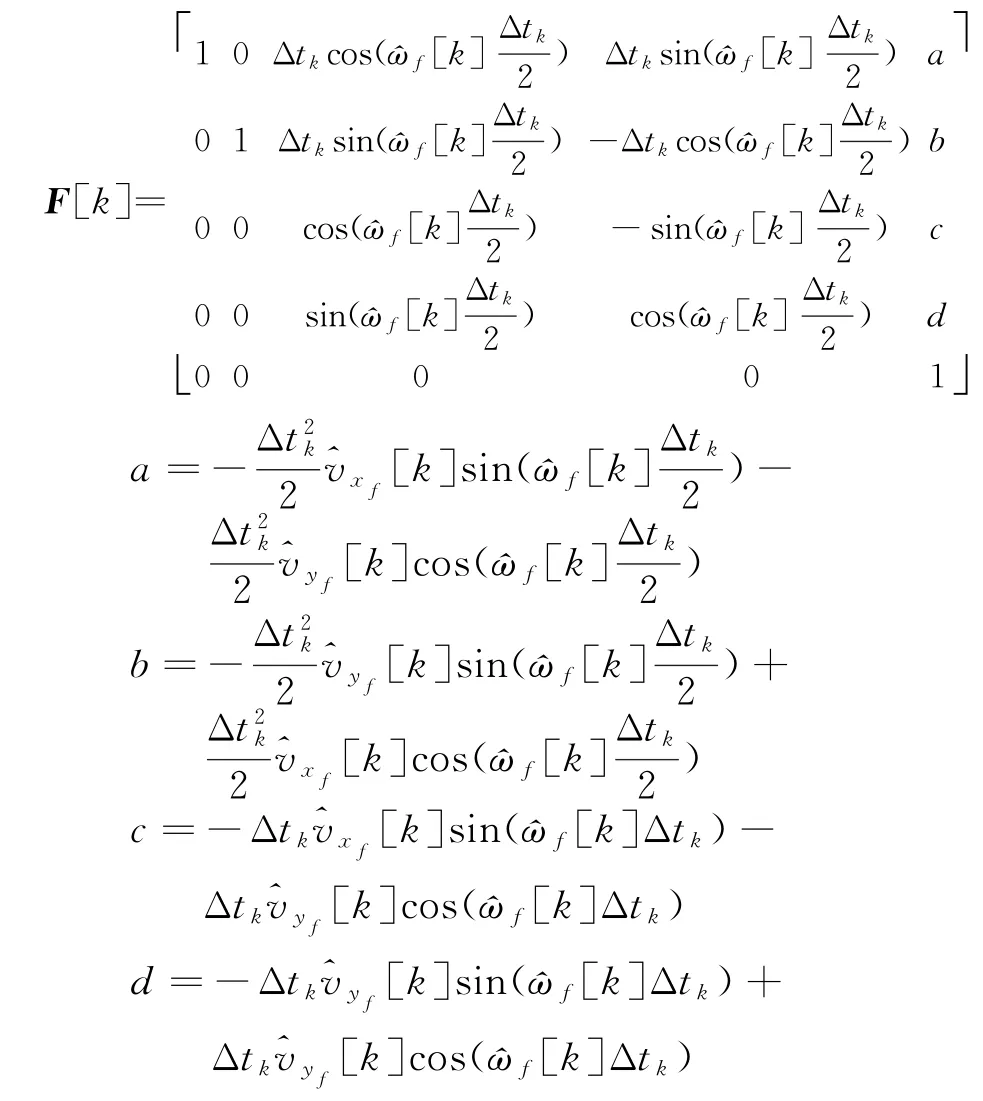
預測航跡狀態向量的協方差矩陣通過公式P p[k+1]=F[k]P f[k]F[k]T+Q[k]更新,此處P p和P f分別表示預測協方差矩陣和濾波器誤差向量,F[k]表示預測公式的Jacobi矩陣:
量測模型定義如下:
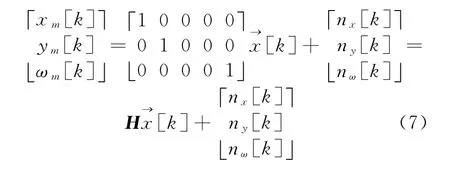
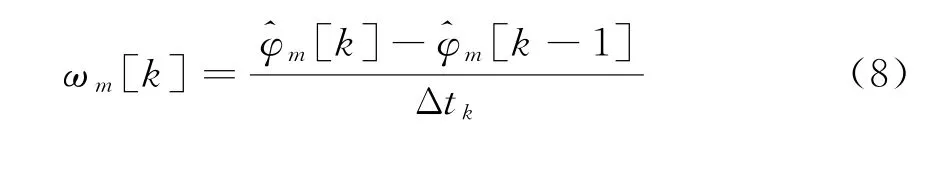
此處,n x[k],n y[k]是擴展目標點跡提取誤差,轉彎速度ωm和方差σωm通過方位一次差估計獲得,時間間隔為Δt k:

綜合考慮預測和測量噪聲模型的航跡狀態向量更新公式為:^x f[k]=^x p[k]+W[k]i[k],此處W[k]為Kalman增益矩陣,i[k]為新息向量:
最終,更新向量的誤差協方差矩陣P f[k]=(I-W[k]H)P p[k]。
為了提高直線運動中的性能,需要實現一個切向機動檢測器,除非發現了切向機動,否則濾波器估計轉彎速度^ωf設置為0 rad/s。在轉彎速度估計公式中只使用檢測到的機動。
4 性能評估
在某場面監視雷達設備上通過實測數據對目標跟蹤算法的性能進行驗證,場監雷達的系統參數:轉速為60 r/min,工作頻率為15.9 GHz,雷達威力為5 km,距離分辨率為3 m,方位分辨率為0.35°,目標定位精度為10 m。跟蹤目標包括在機場公路運行的加油車輛、降落-滑行-停止的飛機和滑行-等待-起飛的飛機,跟蹤結果如圖2、圖3所示。
圖2為位置濾波結果,基于區域約束的目標跟蹤架構在考慮了機場區域和目標運動特性后,可以對進入跑道飛機進行快速起始,第一時間發現目標,對滑行道、停機坪等區域的慢速目標的虛警抑制明顯;在目標從跑道降落到滑行道、停機坪的過程中,本文的目標跟蹤算法能夠動態調整目標機動特性,選取合適的平滑因子來完成對目標位置和速度估計,從而有利于后續計算準確的跟蹤波門。
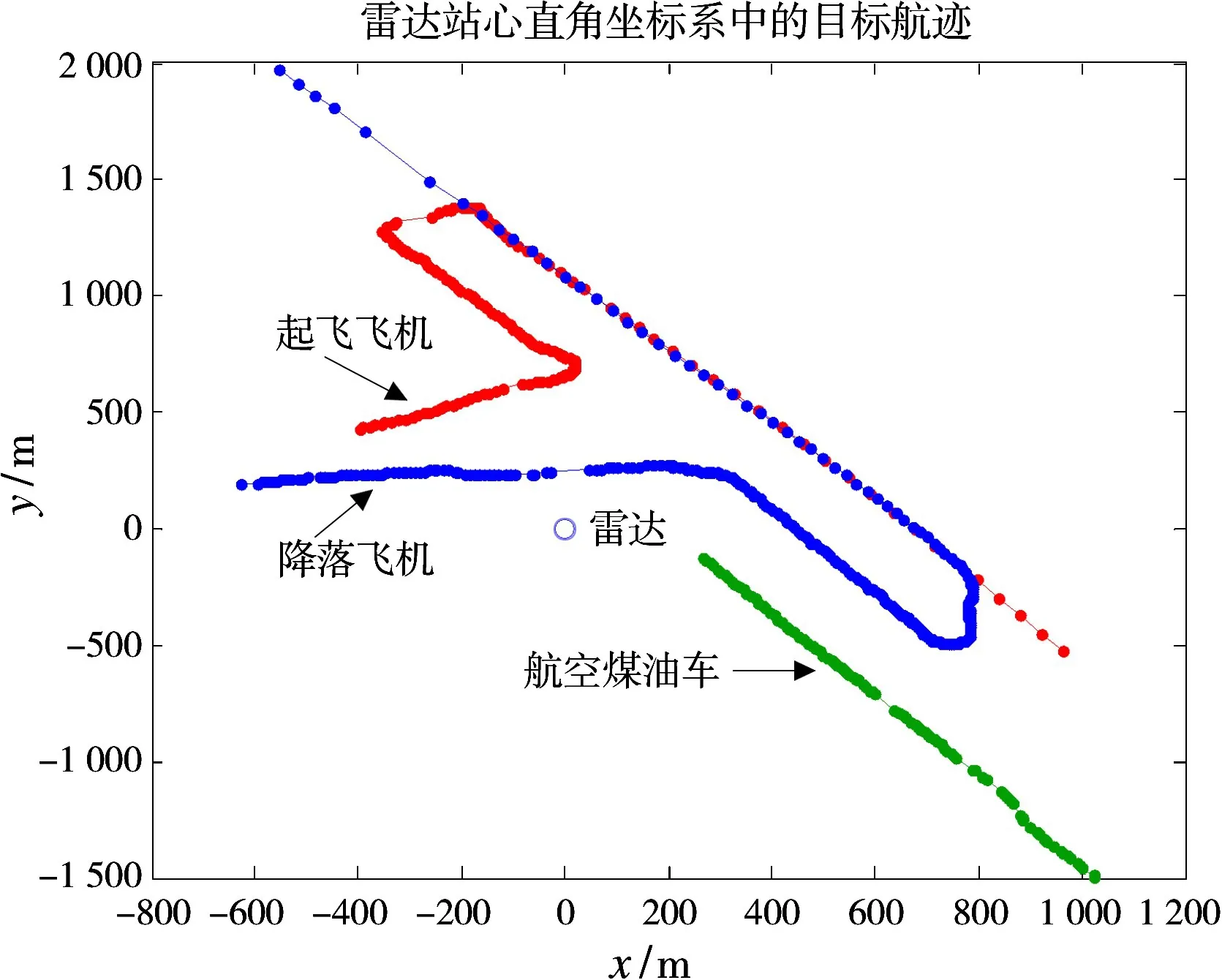
圖2 3批目標位置濾波結果
圖3為速度濾波結果,3批目標航跡除首點因測量數據偏少導致速度差分計算誤差較大外,其他速度濾波點均平滑穩定。降落飛機的跟蹤速度范圍從65 m/s減小到10 m/s,最小速度跟蹤到10 m/s后由于航站樓遮擋導致目標跟蹤丟失;起飛飛機的跟蹤速度達到35 m/s時飛行高度超高60 m導致目標跟蹤丟失;航空煤油車速度一直穩定保持在13 m/s左右,進入雷達近區盲區后跟蹤丟失。
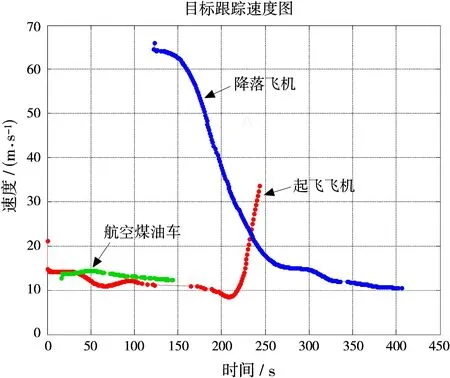
圖3 3批目標速度結果
對觀測一天的某機場324批(71架飛機、253輛汽車)數據進行加入約束前與約束后正確相關率、虛假航跡個數、航跡跟蹤質量等統計結果如表2所示。
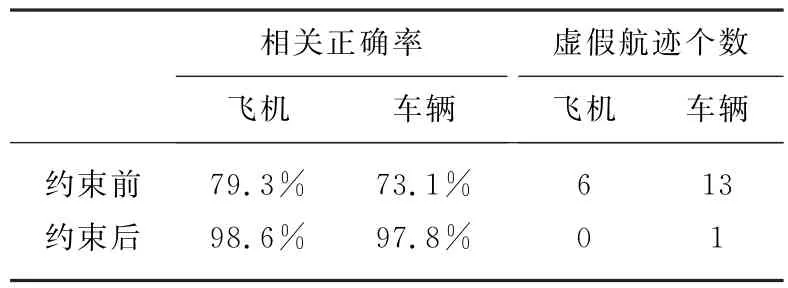
表2 區域約束前與約束后的性能比較
通過表2結果可以看出,采用機場區域對目標跟蹤進行約束后可以大幅度提高目標相關正確率,降低虛假航跡數量,采用的區域信息越精確跟蹤質量就越高,但同時意味著區域存儲和計算的計算量也會增大,實際中需要進行相應的選擇。
5 結束語
通過對機場場面活動目標跟蹤問題研究,在目標跟蹤過程中考慮區域類型、活動目標(飛機、車輛)運動參數等先驗知識,在特定區域內采取相應的目標起始、相關和跟蹤濾波準則,本文提出了基于區域約束的目標跟蹤處理架構:首先介紹了目標提取、點航相關、航跡更新和目標分類、航跡管理等處理模塊,以及機場活動區域、機動目標特性、歷史航跡數據等先驗知識支撐庫;其次重點對機場區域設置和目標跟蹤濾波算法進行了詳細描述;最后通過在某場面監視雷達設備上進行了實測數據驗證,本文的算法能夠對機場場面活動目標進行全程穩定跟蹤,尤其對于跨區域運動、滑行-等待-起飛和降落-滑行-停止等復雜運動特性,本文的跟蹤算法有良好的適應能力,解決了機場場面復雜場景的活動目標跟蹤問題。
[1]李斌,張冠杰.場面監視雷達技術發展綜述[J].火控雷達技術,2010,39(2):1-7.
[2]宮淑麗,陶誠,黃圣國.A-SMGCS的多場面監視雷達多目標航跡相關[J].計算機測量與控制,2012,20(8):2183-2186.
[3]沈杰,晏勇.機場場面監視雷達反雜波性能分析[J].雷達科學與技術,2014,12(2):123-126.
[4]宮淑麗,王幫峰,吳紅蘭,等.基于IMM算法的機場場面運動目標跟蹤[J].系統工程與電子技術,2011,33(10):2322-2326.
[5]趙鈴鈴.場面監視雷達數據處理及軟件實現[D].成都:電子科技大學,2009:17-38.
[6]靳俊峰,方青,田明輝.基于檢測分段的機場目標提取算法[J].計算機應用,2013,33(S1):310-311,314.
[7]靳俊峰,方青,田明輝.基于隸屬度和貝葉斯分類的機場目標分類研究[J].雷達與對抗,2013,33(1):23-25,55.
猜你喜歡
小哥白尼(軍事科學)(2022年3期)2022-06-09 03:11:24
環球時報(2022-05-30)2022-05-30 15:16:57
今日農業(2021年9期)2021-11-26 07:41:24
發明與創新·小學生(2021年3期)2021-03-25 11:48:49
民用飛機設計與研究(2020年4期)2020-11-27 17:34:02
當代陜西(2019年11期)2019-06-24 03:40:28
作文周刊·小學一年級版(2017年9期)2017-06-20 00:19:33
小學生導刊(低年級)(2016年8期)2016-09-24 22:09:04
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44