仿生搖擺嬰兒床的機構設計
2014-11-27 04:26:14張大然蕫克權李冬青黃柱凱
肇慶學院學報 2014年5期
張大然,蕫克權,李冬青,黃柱凱
(肇慶學院 電子信息與機電工程學院,廣東 肇慶 526061)
隨著人們生活水平的提高,嬰兒的成長受到家長越來越多的關注.中國每年新生嬰兒1 000多萬,嬰兒床等嬰幼產品擁有巨大的市場前景[1].現在很多家庭對嬰兒床的要求越來越高,但目前國內對嬰兒床的相關研究尚不多見,尤其是有關仿生類嬰兒床的研究更為罕見.市面上嬰兒床的質量良莠不齊,設計者通常只從購買者——家長的角度考慮設計,忽略了使用者——嬰兒的需求.設計任何產品都應該從使用者的角度出發[2],嬰兒床的設計首先應從安全角度和讓嬰兒睡得舒適為出發點.新生嬰兒對于剛來到的這個世界充滿好奇,同時也充滿恐慌,只有在母親的懷抱里嬰兒才會感到安全,他們在母親的懷抱里才睡得最安心、最舒適.
設計一款能讓嬰兒睡得舒適的嬰兒床是當前嬰兒產品的研發熱點.現有的各種多功能嬰兒床,雖然功能比較齊全,但據很多使用者的反饋,其許多功能根本用不上,一些使用者自始至終都未能了解所用嬰兒床的大部分功能.由此可見,設計嬰兒床應著重突出其主要功能.調查研究表明,目前市面上的仿生嬰兒床,在仿生技術方面存在缺陷,主要體現在嬰兒床的搖擺過于生硬,不適合嬰兒稚嫩的身體,嬰兒睡在其中缺乏舒適感,不但易醒且易導致煩躁哭鬧,長時間使用會對嬰兒造成傷害.一些專家甚至認為使用這類嬰兒床是在“虐待嬰兒”.長期使用這類嬰兒床會使嬰兒得“搖籃綜合癥”,延緩其智力和身體發育,而且其造成的損傷是不可逆轉的.本文中,筆者以提高嬰兒床的仿生技術為研究對象,設計了一款能模仿成人抱著嬰兒輕緩搖擺并使其睡感舒適的仿生嬰兒床的搖擺機構.
1 原型設計
本研究以成人抱著嬰兒并緩慢搖擺為仿生原型,設計了嬰兒床的整體結構,其模型如圖1 所示.電機轉動經減速后以0.5 r/s 的角速度輸入機構,運動轉換為搖臂的擺動輸出.搖床位置可沿搖臂長度方向適當調整,從而確定擺動幅度.
搖擺機構是實現搖床平緩搖擺的關鍵部分,其設計采用三維建模,并對該機構的運動特性進行了模擬仿真.根據仿真分析結果對機構進行修改,直到獲得更符合仿生特性的搖擺機構.搖擺機構的設計應滿足以下2點:1)執行機構搖擺的軌跡與成人哄抱嬰兒時雙手的運動軌跡基本吻合;2)搖床搖擺平緩柔和,能讓嬰兒感到舒適、安全.

圖1 嬰兒床機構簡圖
2 機構的設計過程
首先測量成人懷抱嬰兒并哄其入睡的搖擺軌跡,根據動作特征提取相關參數,得出成人懷抱嬰兒搖擺的一系列運動參數;然后,選擇設計的幾種機構進行綜合運動仿真,提取各機構的運動參數進行對比分析,選用吻合程度較高的機構;最后,以成人懷抱小孩的運動參數為依據,進一步完善機構設計.
2.1 成人懷抱小孩運動參數的測量
成人抱著嬰兒哄其入睡的方式很多,但萬變不離其宗,主要還是通過搖擺嬰兒使其感到舒適從而促其盡快進入睡眠狀態.多數人搖擺嬰兒時是以腰部微微轉動帶動手臂運動的,這樣的搖擺才能使嬰兒感到舒適、安穩.
為了簡化測量過程并提高測量數據的可靠性,實驗時使用了相關傳感器進行測量[3],測得成人懷抱嬰兒搖擺時手臂的運動參數.筆者分別對常見的搖擺運動方式進行測量,并記錄嬰兒躺位的速度和位移數據,經過多次測量,通過求平均值的方法計算出嬰兒躺位的速度和位移參數,并將之描繪成曲線圖.
2.2 搖擺機構的設計
根據對設計原理的構思與分析,選擇參鑒無急回特性的曲柄搖桿機構的性質及設計[4-5],力求保證機構運動的平穩性.
機構的設計方案種類繁多,筆者根據機構實現的難易程度、制造成本等,對機構進行評判和選擇,結合可行性和實用性,設計出2種機構,機構簡圖如圖2所示.其桿長參數依據無急回特性的曲柄搖桿機構的性質設計,當B′E′與FG 垂直的時候,B′D′=43.3 mm,其他桿長參數見表1.

圖2 機構簡圖

表1 2個機構的桿長 mm
機構1是最常見的曲柄搖桿機構,曲柄AC 繞C 點作圓周運動,搖桿BE 繞E 點作往復運動.機構2在連桿C′D′的D′點連上一個滑塊1,該滑塊沿著導軌FG 運動;滑塊2沿著搖桿B′E′運動,滑塊1與滑塊2用鉸鏈連接.曲柄A′C′繞A′點作圓周運動,搖桿B′D′繞B′點作往復運動.
2.3 機構運動參數的分析
在機構1和機構2的模型中,曲柄為原動件,角速度為0.5 r/s(即2 s轉動1次),用ADAMS對機構進行運動仿真,分別導出2個機構的速度和位移數據,并將數據描繪成曲線圖.
圖3~6是機構1和機構2的仿真運動數據與成人懷抱小孩搖擺時測量數據的對比結果,包括x,y 方向的位移變化和速度變化.

圖3 x 方向速度

圖4 y 方向速度

圖5 x 方向位移

圖6 y 方向位移
由圖3~6可見,取機構1和機構2各運動參數的峰值和到達峰值的時間差,將其與實際測量的運動參數進行對比分析,結果如表2和表3所示.

表2 速度變化情況
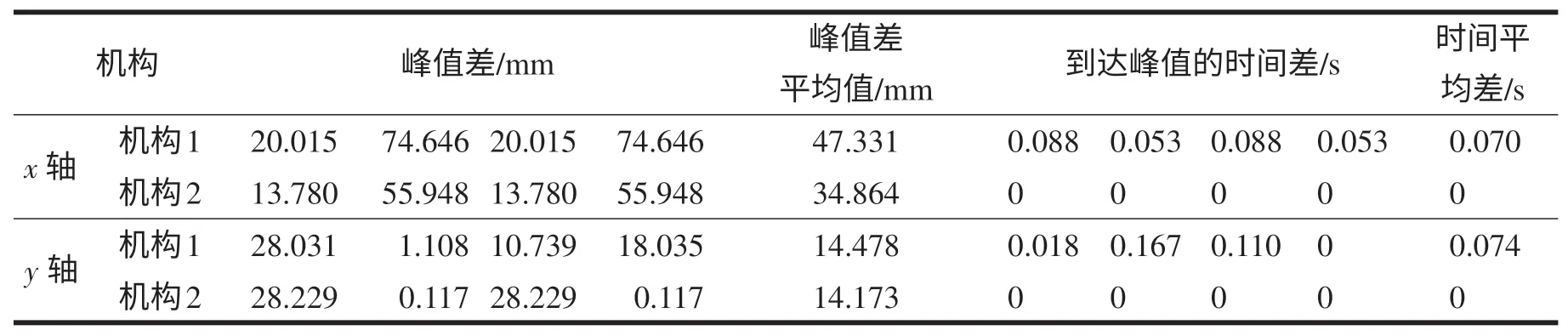
表3 位移變化情況
通過分析表2和表3可知,速度的變化曲線影響搖籃的加速度.速度變化越平緩,加速度越小,嬰兒在搖擺過程中受到的離心力也隨之減小,因此機構2比機構1更適合嬰兒.位移變化曲線影響搖擺過程中擺幅的大小,擺幅大會增加機構制造成本,占用的空間比較大;而擺幅小則會使嬰兒受到的沖擊更頻繁,從這個角度說,機構2也優于機構1.“峰值差”和“到達峰值的時間差”,能直接反映2種機構運動軌跡同實際測量運動軌跡的相似度.在峰值差對比中,機構2 的各項數據峰值更接近實際測量的各數據峰值.在“到達峰值時間差”對比中,機構2的各項數據與實測的各項數據吻合度很高.由此可見機構2比機構1更適用于嬰兒床的傳動系統,且機構2的運動特征與成人哄抱嬰兒搖擺的運動特征非常接近.
通過對各項數據進行對比分析,可知2種機構的運動與成人哄抱嬰兒的實際動作都存在一定差距,但是機構2的吻合程度明顯高于機構1.
3 結束語
1)根據成人懷抱嬰兒緩慢搖擺哄其入睡的動作特征,構思了一種新穎的嬰兒床搖擺方式,并對該搖擺方式進行了分析.根據分析設計出2種嬰兒床的搖擺機構,通過對2種機構進行運動仿真,提取了其運動速度和位移參數.
2)使用傳感器測量成人懷抱嬰兒緩慢搖擺的運動參數,將2種機構的仿真運動數據與實測數據進行比較,選用了吻合程度較高的機構.
3)文中所述的2種機構并非最優的搖擺機構,隨著科學技術和生活水平的日趨提高,人們對嬰兒床搖擺仿生程度的要求也將越來越高,仿生嬰兒床必將擁有廣闊的應用前景,而仿生嬰兒床的機構設計、性能優化等方面尚有待深入研究和不斷完善.
[1]延海霞.嬰兒搖籃產品設計開發與研究[J].機電產品開發與創新,2010(4):84-86.
[2]張龍,鄭傳昊.淺析多功能嬰兒床的設計[J].大眾文藝,2012(11):87.
[3]常宗瑜,張召遷,姚冰川,等.基于無線加速度傳感器的人體運動參數測量研究[C]//第二十七屆中國(天津)2013IT、網絡、信息技術、電子、儀器儀表創新學術會議論文集.2013:32-36.
[4]馬漩,馬英,高英敏.無急回特性的曲柄搖桿機構的性質及設計[J].機械科學與技術,2003,11(22):152-153.
[5]楊帆,林鈺珍,岑思燕.一種無急回特性的兒童床設計[J].機械研究與應用,2013(3):88-89.
猜你喜歡
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
藝術啟蒙(2018年7期)2018-08-23 09:14:18
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21