無人機飛行控制與管理系統動態仿真測試技術研究
2014-07-09 05:19:26李艷雷周莉莉
導航定位與授時 2014年1期
張 卿,李艷雷,周莉莉
(北京機電工程研究所,北京 100074)
0 引言
自海灣戰爭后,無人機受到各國軍界的高度重視,發展趨勢迅猛。無人機可做各類武器裝備模擬訓練的靶目標,可做電子偵查和預警,可做電子干擾與反輻射攻擊,可做武器制導與通訊中繼,可做目標指示與戰場目標毀傷效果評估,還可直接攜帶武器進行作戰攻擊。因此,無人機在戰爭中具有非常重要的戰術意義與戰略意義。
進入21世紀,隨著微電子、微機電技術、信息技術、智能技術、仿生科學、新型材料技術和航空技術的飛躍發展,無人機的使用范圍由軍事領域拓展到大地測量、農業勘測、交通民用導航、邊境巡邏與控制、自然災害監視與救援等民用領域。
無人機是無人駕駛的,一般采取自動飛行控制系統來控制。1912年,美國愛莫爾·斯派雷(Eimer Sperry)研制成功了世界上第一臺自動駕駛儀,從而開創了自動飛行控制的先河[1]。自60年代,自動駕駛儀功能擴展,到目前發展成具有飛行控制、任務設備管理等復雜功能的飛行控制與管理系統。
無人機最大的優勢是能夠回收,實現可重復使用,并且在飛行過程中可響應地面操控,執行變化的飛行任務,其飛行控制與管理系統要比普通飛行器的控制系統更為復雜。因此,為了確保高可靠性,對其飛行控制與管理系統的測試要求比普通飛行器的測試要求高。
從20世紀50年代至今,各類飛行器所采用的測試方法和完成的測試內容來看,主要是采用“開環+靜態”的方法,實現分立部件的單元測試和部件裝機后的整機綜合測試[2]。這對無人機實際飛行過程中的動態性能無法驗證,對飛行中風干擾等環境干擾因素和傳感器失效后的無人機飛行情況也無法模擬,對飛行過程中測控鏈路人機交互工作的正確性無法檢驗,也就不利于有針對性的進行飛控控制與飛行管理策略修正等。
因此,需要利用仿真技術構建接近真實的無人機飛行工作環境,實現對飛行控制與管理系統全面深入的閉環動態測試,檢驗無人機飛控系統軟、硬件系統工作協調性、正確性,驗證飛行控制與飛行管理等功能的合理性與適應性,顯得尤為必要。
本文介紹了無人機飛行控制與管理系統核心組成部分——控制與管理計算機的動態仿真測試技術,詳細闡述針對控制與管理計算機的故障注入與測試方法;并結合工程實踐給出了無人機飛行控制與管理系統動態仿真測試環境構建原則和動態仿真測試的實施方法。
1 無人機飛行控制與管理系統組成與功能
1.1 系統組成
無人機飛行控制與管理系統 (以下簡稱飛控系統),通常由傳感器子系統、控制與管理計算機、伺服作動子系統以及地面操控與顯示終端組成,如圖1 所示[3]。

圖1 無人機飛控系統一般組成Fig.1 The flight control and management system composition of UAV
傳感器子系統可包括:1)飛行器位置/速度傳感器,如GPS接收機、慣性導航設備或慣性/衛星組合導航設備;2)空速、高度傳感器,如大氣機、動/靜壓傳感器、無線電高度表等;3)姿態/航向傳感器,如慣性導航設備、自動駕駛儀、垂直陀螺和磁航向傳感器等;4)角速率傳感器,如角速率陀螺等。
伺服作動子系統包括升降舵、方向舵、控制副翼、其它按要求進行偏轉的舵機及其控制器和發動機油門控制器等。
地面操控與顯示終端包括任務規劃、綜合遙測信息顯示、遙控操縱及飛行狀態監控等。
控制與管理計算機 (以下簡稱控制計算機)由系統硬件和綜合控制軟件組成,主要擔負信息采集與處理、導航解算與飛行控制、任務管理與火力控制、信息監控與控制輸出等工作,在無人機飛控系統中處于核心地位。
1.2 系統功能
無人機飛控系統功能可分為飛行控制、飛行管理、任務設備管理和火力控制。
飛行控制功能是飛控系統最基本功能,通常包括:俯仰/滾動/偏航姿態控制與穩定、高度控制與穩定、側向偏差控制與穩定、速度控制與穩定、爬升/下滑控制、回收/著陸控制等控制模態。
飛行管理功能一般包括:飛行任務管理與規劃、機載設備故障判斷與處理、導航解算、遙控遙測管理等。
任務設備管理主要包括對任務設備的控制管理與工作狀態監測。
火力控制通常是偵打一體無人機具備的功能,主要包括對掛載武器狀態檢查與監測、目標裝訂、發射控制以及應急投放等。
2 控制計算機動態仿真與測試技術
控制計算機在無人機飛控系統中處于核心地位,只有確保控制計算機的可靠性,才能保證無人機安全、正確地執行任務。因此控制計算機裝機前的動態仿真測試是必不可少的。動態仿真測試的前提要構建控制計算機工作的外部環境,在此基礎上開展常規模式及故障注入模式下的動態仿真。
2.1 控制計算機動態仿真與測試系統
無人機控制計算機動態仿真與測試系統,其內部集成了除控制計算機以外所有與控制計算機交連的分系統模型模擬單元,這些模擬單元在硬件接口上保持了與真實分系統硬件接口的一致性,形成專門針對控制計算機動態仿真與測試的半實物仿真環境,其工作原理圖如圖2所示。通常稱該系統為仿真測試儀。
(1)系統組成
仿真測試儀主要由系統硬件和主控軟件兩大部分組成[4],如圖3所示。
系統硬件是仿真測試儀工作的基礎,它的主要功能是完成仿真測試儀與控制計算機之間信號的傳輸與交互等;主控軟件是仿真測試儀的核心,具有無人機各分系統模型解算、接口信號交互、仿真測試數據實時顯示與存儲、仿真測試流程控制等功能,能夠滿足無人機控制計算機的仿真測試需要。
(2)工作模式
仿真測試儀主要包括如下工作模式:
1)數學仿真:根據空間航跡數學模型,用計算機編程實現在理想情況下和有干擾情況下機體的動力學和運動學模型解算以及控制系統解算的超實時數學仿真,數學仿真結果可作為驗證仿真測試儀系統工作正確性的判據之一。
2)物理仿測:控制計算機參試情況下,通過機體動力學和運動學模型,結合接口通訊模擬功能,實現正常工作流程下控制計算機軟、硬件動態仿真測試。
3)故障注入與測試:控制計算機參試情況下,可設置故障類型、屬性等,并能實時注入故障,實現故障發生時異常流程下控制計算機的動態仿真測試。
4)系統自檢:完成仿真測試儀的接口工作正確性檢查和各項性能指標檢查,以確保仿真測試儀系統進行仿測前處于可用狀態。
綜上所述,仿真測試儀具備控制計算機的所有信號交聯關系,能夠實時模擬控制計算機外部環境的工作過程和時序,既可以作為綜合控制軟件動態調試環境而提供有效的調試手段,也可以作為控制計算機的綜合檢測設備以仿真方法實現動態測試。
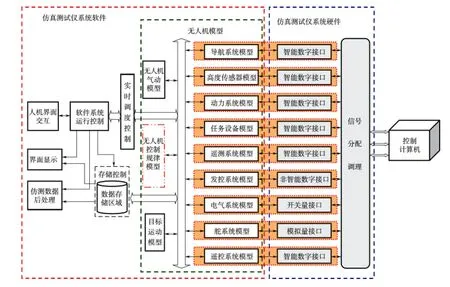
圖2 仿真測試儀系統工作原理圖Fig.2 The working principle of the simulation tester system
2.2 控制計算機動態仿真與測試
(1)常規動態仿真測試
控制計算機常規動態仿真測試,是在正常工作流程和任務約束下檢驗控制計算機信息采集與處理、導航解算與飛行控制、任務管理與火力控制、信息監控與控制輸出等功能的測試手段。
為解決這個難題,蔡元培采取了折衷辦法。他在2月16日致信許壽裳,一方面表示同意為但采爾預發2月份的月俸,另一方面則向同事們解釋:
通過仿真測試儀實施動態仿真測試的方法為:
1)通過系統自檢工作模式,檢驗仿真測試儀系統性能和接口工作正確性,確保處于可用狀態;
2)利用仿真測試儀數學仿真模式得出標準航跡飛行數據;
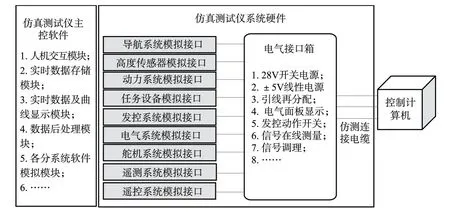
圖3 仿真測試儀系統組成Fig.3 The composition of the simulation tester system
3)進行仿真測試儀與控制計算機實物對接的物理仿測,得到仿真測試儀遙測接口接收的控制計算機遙測數據以及實時飛行航跡運算結果 (統稱實時仿測數據);
4)通過實時仿測數據與標準飛行航跡數據的對比分析,能夠檢驗與定位控制計算機是否存在問題。
(2)故障注入與測試
在無人機實際飛行過程中,由于外界環境影響,飛機各個部分均有可能出現隨機故障,這就要求飛控系統控制計算機能夠及時做出反應并進行處理,以便最大程度地降低損失。因此,對控制計算機可靠性的檢驗僅通過常規動態仿真測試是遠遠不夠的,還需要在動態仿真過程中人為注入故障,以檢測控制計算機的故障處理能力。
仿真測試儀故障注入與測試工作模式具有如下功能:
1)故障設置:能夠根據用戶要求靈活設置故障類型,可選擇的故障盡可能包括各類常見故障,如:慣性導航設備信號丟失、高度傳感器信號丟失、舵機卡死、發動機油門控制器失靈、電源電壓不穩等5。
2)故障注入:按照用戶要求在特定的時間向特定的故障位置注入規定數量的故障,用戶可控制故障注入的起始時間、結束時間,并可在此過程中隨時監視故障注入情況。
3)實時數據I/O傳輸:能夠將注入故障的各類信號實時送入控制計算機中。
4)試驗結果保存與分析:能夠以文件形式保存故障注入動態測試試驗數據,供試驗者分析,以評判控制計算機故障響應與處理能力。
在仿真測試儀故障注入與測試工作模式下,通過軟件方法可實現與控制計算機交聯的外圍設備硬件故障模擬。故障注入靈活可調、易實施。目前已成功應用于多型號無人機控制計算機動態仿真測試試驗中。
以某型無人機為例,其控制計算機具有雙路備份機載測控接口,通常情況下以A通道接收遙控指令并發送遙測數據信息,而當A通道異常時,控制計算機自動啟用B通道執行該功能。在對該控制計算機動態仿真測試中,設定了機載測控接口A通道遙控指令丟失的故障用例,故障模型為Data→no Data,故障屬性為RS-422串口永久性故障,故障注入流程如圖4所示。
經仿真測試儀動態仿真測試后發現,在注入故障后,控制計算機能夠迅速檢測到故障,并自動切換B通道接收遙控指令并發送遙測數據,確保了正確響應遙控指令執行任務設備管理和火力控制等任務,并及時下傳遙測數據供試驗人員進行狀態監測,將故障造成的影響減小到最低。
3 飛控系統動態仿真與測試技術
3.1 飛控系統動態仿真與測試系統構建
無人機飛控系統動態仿真與測試是包含控制計算機、傳感器子系統、伺服作動子系統等在回路的動態仿真與測試,通常稱為飛控系統半實物仿真試驗,能夠為飛控系統控制計算機、各類傳感器及伺服作動系統等被試對象營造更接近實際飛行的動態測試環境。
飛控系統半實物仿真試驗系統由仿真軟件、仿真設備、飛控系統被試對象組成,通過實時光纖通訊設備構建為半實物仿真試驗網絡。
仿真設備除負責仿真模型解算與試驗調度控制的仿真機,負責信號轉換與數據通訊的接口計算機外,還包括各類傳感器工作特性模擬設備,如:運動特性模擬設備、力矩特性模擬設備、高度特性模擬設備、大氣溫度和壓力模擬設備、衛星導航模擬設備、多普勒雷達模擬設備等。
飛控系統半實物仿真試驗系統構建以被試對象和試驗目的為原則,以模塊化搭積木的方式組合成相應的半實物仿真試驗系統。
以某無人機為例,飛控系統被試對象為控制計算機、慣性/衛星組合導航設備、大氣數據計算機和舵系統。為了檢驗實際飛行中各傳感器子系統的工作性能,檢驗伺服作動機構的實際執行能力,檢驗控制計算機的飛行控制與飛行管理等功能以及驗證飛控系統各設備的工作協調性、正確性。以仿真機、接口計算機、三軸仿真轉臺 (運動特性模擬設備)、總溫總壓模擬器 (大氣溫度和壓力模擬設備)、舵機負載模擬器 (力矩特性模擬設備)為仿真設備,并運行仿真機軟件、接口機軟件,通過光纖網絡和機上仿真測試電纜連接被試對象構成飛控系統半實物仿真試驗系統,如圖5所示。

圖4 故障注入流程圖Fig.4 The flow chart of fault injection
3.2 飛控系統動態仿真與測試
飛控系統的動態仿真與測試,最大的功能用于飛行控制參數調試,根據仿真測試結果對最初的設計進行調整、完善,循環進行多次仿真后得到理想的控制系統參數。另外,還可以用于控制計算機與各類傳感器和伺服作動子系統聯合工作時特殊處理功能 (如組合高度修正算法等)的檢驗。
利用半實物仿真試驗系統中的各類仿真設備實現對整個飛控系統被試對象的動態仿真與測試:
1)通過仿真機軟件實現常值風、突風、紊流干擾、常值力矩干擾、空氣動力系數拉偏等典型干擾剖面動態仿真,檢驗飛控系統控制參數的適應性和魯棒性,驗證飛行控制方案和控制參數的合理及正確性。
2)在各類傳感器工作特性模擬設備中,可以人為模擬故障,檢驗傳感器對異常環境的應急響應能力,進而檢驗飛控系統的故障處理流程。
3)通過接口機軟件也可以注入故障 (方法與仿真測試儀故障注入與測試類似),達到對整個飛控系統故障處理能力的檢驗,并驗證飛控系統各軟、硬件的工作協調性、安全性和可靠性。
4 結束語
飛控系統對無人機的重要作用不言而喻,飛控系統動態仿真與測試已成為無人機系統研制過程中必不可少的研試驗證手段。無人機上越來越多的關鍵設備參與到飛控系統的動態仿真測試回路中,以仿真測試儀為關鍵設備,已實現了飛控系統與發動機實物全機參試的動態仿真與測試。后續飛控系統動態仿真與測試環境將向著更加接近真實的天地一致性趨勢發展。
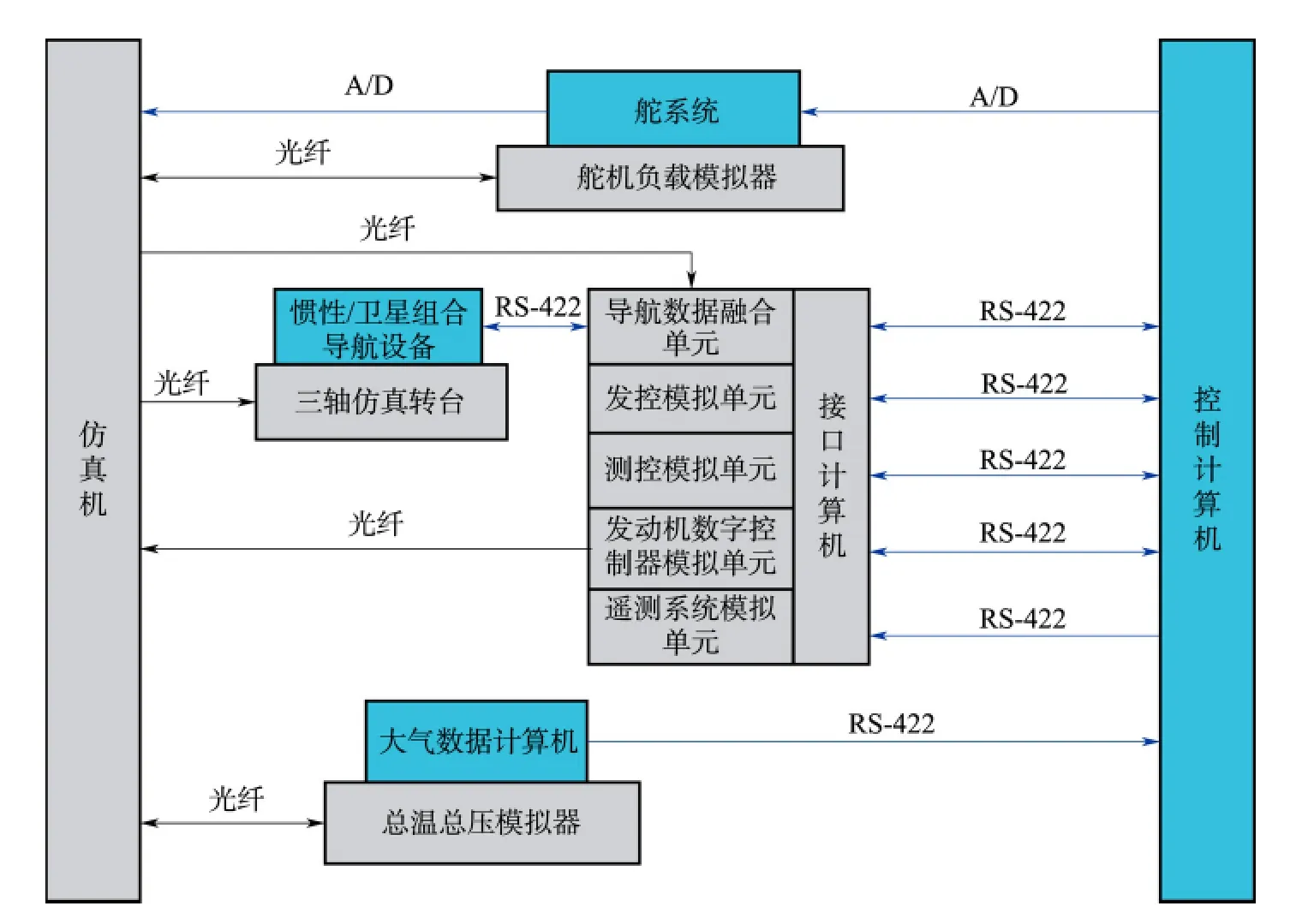
圖5 飛控系統半實物仿真試驗組成Fig.5 The composition of HWIL simulation for flight control and management system
[1]王松輝.基于dSPACE的無人機飛行控制系統半實物仿真研究[D], [碩士學位論文],南京,南京航空航天大學,2008.[Wang Song-hui.Research on Hardware-in-Loop Simulation for flight control system of UAV based on dSPACE[D].Nanjing,Nanjing University of Aeronautics and Astronautics,2008.]
[2]薛鵬,肖前貴,高艷輝.某無人機飛控系統半實物仿真平臺設計 [J].現代電子技術.2012,35(13):111~118.[Xue Peng,Xiao Qian-gui,Gao Yan-hui.Design of hardware-in-the-loop simulation platform for a certain UAV flight control system [J].Morden electronic technique.2012,35(13):111 ~118.]
[3]王宏倫,王英勛.無人機飛行控制與管理[J].航空學報揮控制.2008,29.[WANG Hong-lun,WANG Ying-xun.Flight Control and Management System of Unmanned Aerial Vehiclesl,[J],Journal of Aviation 2008,29.]
[4]沈超,郭卓鋒,張卿.基于CPCI總線的某飛行器仿真測試儀系統設計[C].2010年全國仿真技術學術交流會.[Shen Chao,Guo Zhuo-feng,Zhang Qing.Design of simulation and testing system for aircraft based on CPCI bus[C].The national simulation technology of academic exchange,2010.]
[5]張貝蓓,陳欣.無人機動態測試中的故障注入研究 [J].工業控制計算機,2005,18(5):9~11.[ZHANG Beibei,CHEN Xin [J].Study on Fault Injection of UAV's Dynamic Testing,industrial Control Computer,2005,18(5):9~11.]
猜你喜歡
中國特種設備安全(2022年6期)2022-09-20 02:52:28
小學科學(學生版)(2021年7期)2021-07-28 06:44:42
科技傳播(2019年22期)2020-01-14 03:06:34
汽車維修與保養(2019年7期)2020-01-06 03:30:42
電子制作(2018年11期)2018-08-04 03:26:08
消費導刊(2017年20期)2018-01-03 06:26:40
汽車維護與修理(2016年10期)2016-07-10 08:17:41
工業設計(2016年12期)2016-04-16 02:52:00
汽車維修與保養(2015年6期)2015-04-17 03:31:50
汽車維護與修理(2015年2期)2015-02-28 12:15:39
