一種具有除反饋和除前饋的負反饋控制系統
2014-07-09 05:19:24馬澍田馬新明
導航定位與授時 2014年1期
關鍵詞:系統
馬澍田,馬新明,史 震
(1.哈爾濱工程大學自動控制學院,哈爾濱黑龍江 15001;2.北京自動化控制設備研究所,北京 100074)
0 引言
自動控制系統就是負反饋控制系統,自動控制理論也是負反饋控制理論,實質是利用輸入量減去反饋量所得的偏差對系統的被控量進行控制。系統的性能受系統穩定性的限制,很難達到人們的期望值,多年來人們針對系統偏差量相繼研究出多種控制規律,來提高偏差量對系統的控制能力,達到提高系統的某個或某些性能指標的目的。例如PID控制、變結構控制、模糊控制和最優控制等。上述控制方法不能全面的成倍的提升系統的性能指標。甚至還造成系統的個別性能指標變壞或工程上不易實現的問題。
在上述控制方法中,分別加入除反饋和除前饋兩個環節后,不但不改變原系統的穩定性,而且還能將系統的所有的動態指標和穩態指標提高到原系統的3倍。
1 控制系統數學模型
設系統的輸入量為γ(t),其絕對值為γ1=γ(t) ,反饋為|b(t)|,其絕對值為b1= | b(t) | 。將除式γ1/b1作為輸入支路的一個環節,稱為除反饋,將除式b1/γ1作為反饋支路的一個環節,稱為除前饋。具有除反饋和除前饋的負反饋控制系統的一般形式如圖1所示[1]。
e,c——分別為系統的偏差,輸出量;
u,f——分別為除反饋,除前饋環節的輸出量;
Gc(z)——計算裝置的脈沖傳遞函數;
K?——功率放大器的放大系數;
Gδ(s)——舵系統的傳遞函數;
Gd(s)——被控對象的傳遞函數;
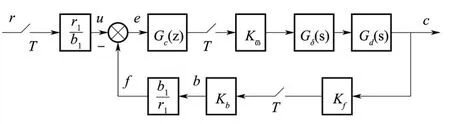
圖1 具有除反饋和除前饋的負反饋控制系統的結構圖Fig.1 The structure diagram of negative feedback control system with the function of division feedback and division former feedback
Kf、Kb——分別為反饋測元件的傳遞系數,反饋調節系數;
T——采樣器的采樣周期。
若采樣周期T等于或小于控制系統中各環節的最大時間常數的1/10,就可將數字控制系統按其對應的連續模擬控制系統進行分析設計,見圖1。相對應的連續模擬控制系統的結構如圖2所示[2]。
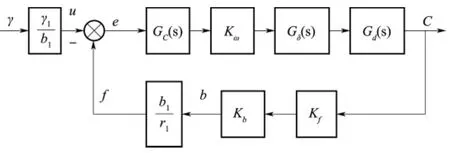
圖2 與圖1相對應的連續模擬控制系統的結構圖Fig.2 The structure diagram of control system of continuous simulation corresponding Fig.1
下面以圖2所示系統為例,對系統作簡要說明分析。
2 系統的輸出特性
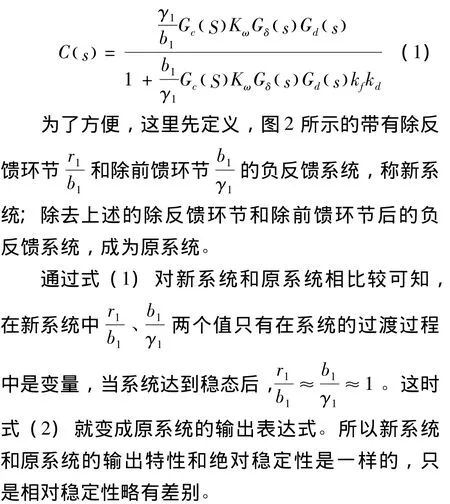
圖2所示系統的輸出為:
3 系統的動態性能
通過新系統中的除反饋和除前饋兩個環節的作用,使系統的偏差量是原系統的3倍多,尤其是在系統的過渡過程階段,新系統的偏差更大。所以致使新系統在過渡過程中的上升時間和調節時間是原系統的三分之一還短。若系統是有超調的,則新系統的超調量略大,但超調量振蕩次數不變。新系統的上升時間和調節時間比原系統的三分之一還短,是新系統的第一特點。對新系統的相關特性進行了數學仿真。仿真對象為一典型二階系統,如圖3所示。輸入幅值為10的階躍信號。
系統帶寬為1.0 Hz左右,阻尼比為1.0。負反饋作用下,系統響應調節時間在0.8 s以上;除反饋作用下,系統響應調節時間在0.35 s左右。具體見圖3、圖4。
4 對新、原控制系統的控制能力的對比分析
控制系統的控制能力表現在兩個方面:第一是系統的輸入量對其輸出量的控制能力;第二是系統的反饋量抵抗系統前向通道中的外干擾和參數變化對其輸出量影響能力。總之,系統的控制能力,就是在保證系統穩定性的前提下,系統的輸入量和反饋量產生偏差量大小的能力。
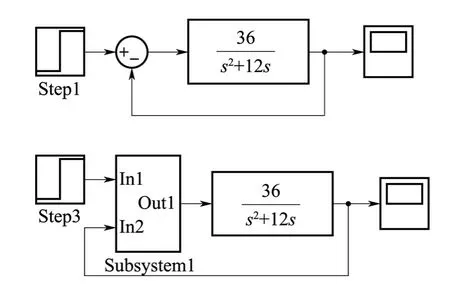
圖3 典型二階系統Fig.3 Typical second-order systems
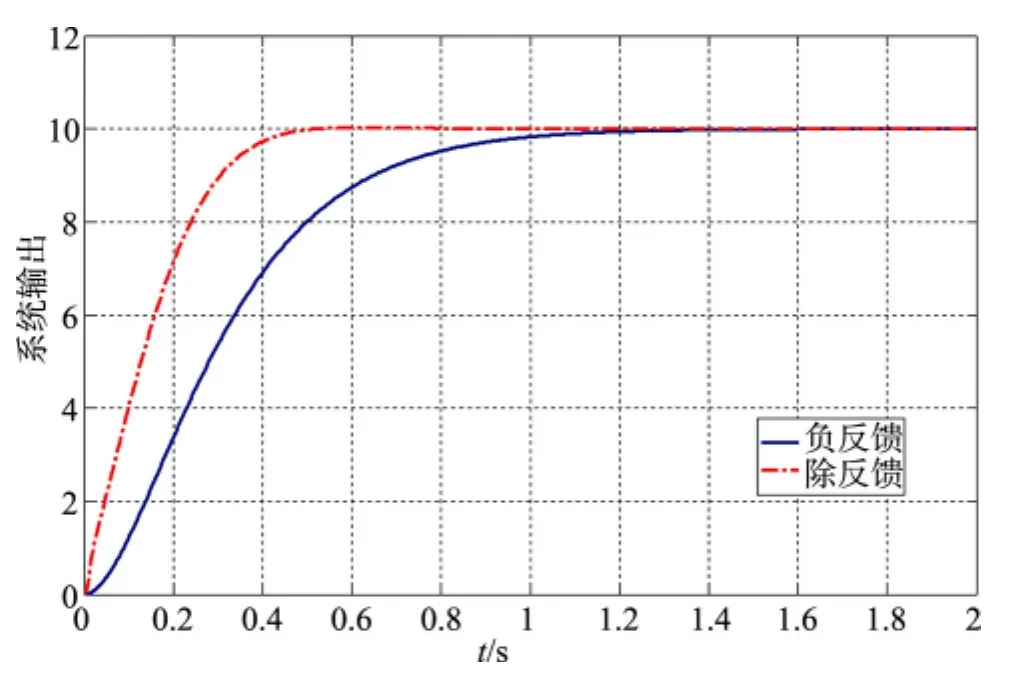
圖4 兩種系統上升時間對比Fig.4 The contrast between two systems's response time
對于單一的負反饋控制系統,即原系統,Δγ1()k 和Δb1()k 分別變化或同時變化,所引起的Δe1()k的最大值分別為:
對于具有除反饋和除前饋的負反饋控制系統,即新系統,設輸入量和反饋量在其幅值變化前有
γ1=b1,Δγ1()k 和 Δb1()k 與式 (2)中的相等,
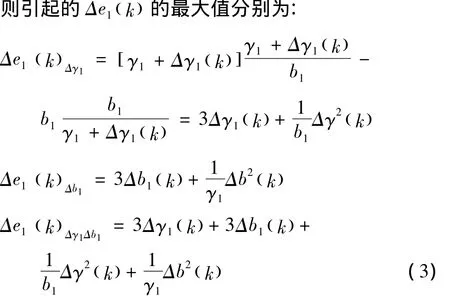
比較式 (2)和式 (3)中各對應式知,新系統對系統的控制能力是原系統的3倍多,式 (2)和 (3)也是新系統所有性能指標提高到原系統的3倍的理論依據,這是新系統的第二個特點。
5 系統抵抗前向通道的外干擾和參數變化對其輸出量的影響的特性
單一的負反饋控制的原系統,只靠負反饋一種控制通道來抵抗其前向通道的外干擾和參數變化對系統輸出的影響,新系統又增加了除反饋和除前饋,與負反饋一起,綜合作用,來實現上述功能。通過式 (2)和式 (3)看出,新系統的反饋硬度是原系統的三倍,也就是說新系統抵抗其前向通道的外干擾和參數變化對系統輸出量的影響是原系統的三分之一。
新系統反饋硬,使它具有抵抗舵面的反操縱的能力,這樣就可以將飛行器的舵面的壓心設計在舵軸上或其附近,大大減少舵面的氣動鉸鏈力矩,這一方面可以減小舵機的輸出力矩,另一方面可增大舵面對飛行器的控制力矩,從而提高飛行器的機動能力。這是新系統的第三個特點。
6 結束語
1)具有除反饋和除前饋的負反饋系統,具有本文所提出的三個特點。能夠顯著提高系統的控制性能,適用于飛機、導彈特別是高速、超高速飛行器的控制系統中。
2)本文只提出了具有除反饋和除前饋的負反饋控制系統的基本控制方案和基礎理論。重點分析了新系統的動態特性,后續將針對系統設計與應用作進一步闡述。
[1]Alexander C K,Sadiku M N O..Fundamentals of Electric Circuits[M].3rdedition,New York:McGrawHill,2007.
[2]Astrom K J,Franklin.Control Systems Engineering Education[J].Automatica,32(2).2.
[3]KuoB C,Golnaraghi F著,王小帆,李翔譯。Automatic Control Systems[M].第 8版,北京:高等教育出版社。[KuoB C,Golnaraghi F Automatic Control Systems[M].8thEdition Beijing:Higher education press.Translate Wang Xiaofan and LiXiang.]
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
