高超聲速飛行器強魯棒自適應控制器設計新方法
2014-07-09 05:19:22廉成斌熊子豪
導航定位與授時 2014年1期
任 章,廉成斌,熊子豪
(1.北京航空航天大學自動化科學與電氣工程學院,北京,100191
2.飛行器控制一體化技術國防科技重點實驗室,北京, 100191)
0 引言
高超聲速飛行器的定義是指飛行速度大于5Ma的有翼或無翼飛行器[1]。高超聲速飛行器整個飛行任務過程中飛行空域變化大,飛行速度變化范圍寬,且大包線高動態飛行環境惡劣,內外部干擾嚴重,使得高超聲速飛行器的系統參數大范圍劇烈變化,且存在嚴重的不確定性。因此,面對高超聲速飛行器這一類參數大范圍劇烈變化,具有嚴重不確定性和內外部干擾的強耦合非線性被控對象,一般的魯棒控制、自適應控制方法難以奏效,設計出的控制系統難以適應系統參數大范圍劇烈變化以及嚴重不確定性,對內、外部干擾具有強抑制能力也較弱,不能滿足高超聲速飛行器的控制需求。
論文以助推滑翔式高超聲速飛行器為被控對象,針對高超聲速飛行器再入返回飛行過程中系統參數大范圍劇烈變化以及存在嚴重不確定性的特點,同時考慮外界環境干擾復雜,內部干擾嚴重的特殊問題,提出了一種新型強魯棒自適應控制器構型。新構型控制器分為主控制器+補償控制器,且主控制器、補償控制器可分開設計。主控制器面向標稱系統,可采用成熟的控制理論來設計,比如設計PID控制器,使閉環系統具有工程要求的性能;將系統參數大范圍劇烈變化、系統的不確定性以及內、外部干擾等視為“系統擾動”,采用合適的手段估計“系統擾動”并作為補償控制器的輸入,通過設計強魯棒自適應補償控制器對“系統擾動”進行補償,在主控制信號和補償控制信號的共同作用下,保證閉環系統穩定且滿足工程要求的控制性能,從而使閉環系統對“系統擾動”具有強魯棒性。這種強魯棒自適應控制方法大大提高了高超聲速飛行器控制系統對內、外部干擾的抑制能力和對系統參數大范圍劇烈變化以及嚴重不確定性的適應能力。
1 新型強魯棒自適應控制器
1.1 新型強魯棒自適應控制器的原理
無論是古典控制理論還是現代控制理論,在被控對象具有精確數學模型的基礎上,它們都是從一個系統的數學模型出發,設計一個控制器,使該系統滿足特定的性能指標要求。然而,在實際問題中,因為工況變化、外部干擾、未建模誤差以及系統的各種故障等緣故,對象的數學模型不可避免地存在著各種形式的不確定性,實際被控對象的精確模型很難得到。魯棒自適應控制研究的主要問題是當系統存在不確定性和外在干擾時,如何設計控制律使閉環系統具有更強魯棒性。本文首先以線性系統為對象,說明新型強魯棒自適應控制器的構成原理。圖1是傳統的反饋控制系統原理結構圖。
其中,被控對象P的標稱模型為P0,K0為能穩定標稱模型P0的一個標稱控制器。當被控對象P具有較大的不確定性時,期望控制器能夠“自適應”地變為魯棒控制器K,使系統穩定并滿足性能要求。研究表明[2],通過適當改變控制器結構,確實存在一種可以同時兼顧系統性能和魯棒性的魯棒控制器結構。
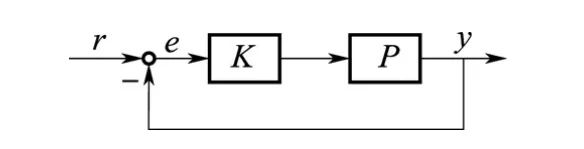
圖1 傳統反饋控制系統原理結構圖Fig.1 The scheme of traditional feedback control system
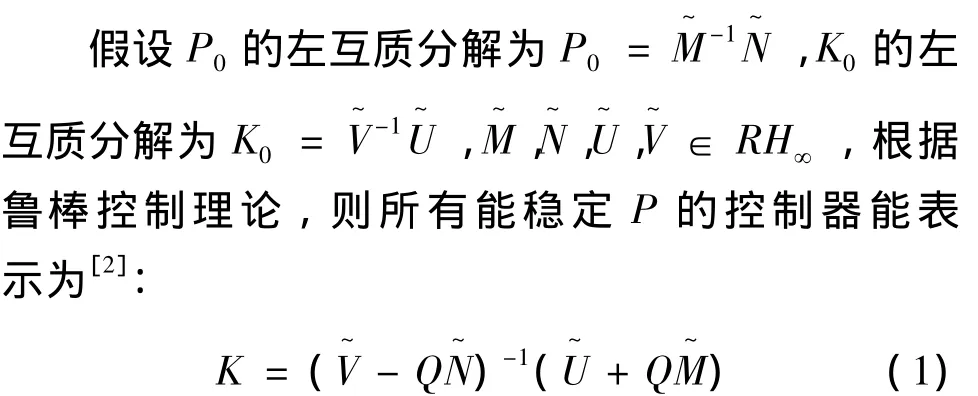
通過適當的變換,可將控制器K實現成下圖所示的形式。

圖2 新型強魯棒自適應控制器結構Fig.2 The scheme of novel strength robustness adaptive controller

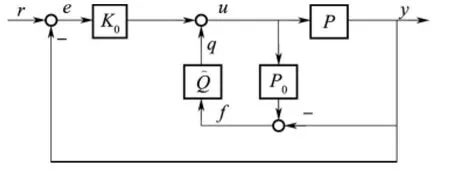
圖3 P0和K0都穩定時,新型魯棒控制器結構Fig.3 The scheme of novel strength robustness adaptive controller,when P0and K0stable
從以上結構可以看出,魯棒控制器的內環由觀
這種控制器構型的特別之處在于,當不考慮系統參數偏差和不確定性時,被控對象P=P0=,內回路中f可視為觀測器誤差,可視為補償控制器。此時f=-=0 ,補償控制器的輸入為零,輸出為零,補償控制信號為零,對被控對象不起控制作用;當系統參數相對于標稱系統發生變化或存在不確定性時,觀測器誤差f≠0,內回路控制器Q輸出一個附加的補償控制信號,用以補償參數變化和不確定性的影響。故稱這種控制器為新型強魯棒自適應控制器。這種控制器構型由美國路易斯安那州立大學周克敏教授和北京航空航天大學任章教授首次提出,并給出相應的穩定性證明[3]。由于這種新型控制器結構可以克服傳統的控制器設計中系統性能和魯棒性難以同時兼顧的缺陷,具有較好的工程應用前景,近年得到了控制領域的廣泛關注和多種形式的拓展推廣。
1.2 面向非線性系統的新型強魯棒自適應控制器構型拓展
將面向線性系統的新型強魯棒控制器構型和設計思想推廣到非線性系統,可得到面向非線性系統的新型強魯棒自適應控制器構型如下圖[4]:
圖4 新型強魯棒自適應控制器構型Fig.4 The scheme of novel strength robustness adaptive controller
由圖4可見,新型強魯棒自適應控制器可分為兩部分,一部分是以跟蹤誤差為輸入的主控制器,另一部分是以擾動估計誤差為輸入的補償控制器。這里的“系統擾動”指的是系統參數變化、系統不確定性或內、外部干擾等。主控制器面向被控對象的標稱模型設計,主要考慮閉環系統的性能,可采用現有成熟的控制方法 (如PID控制)來設計;補償控制器主要考慮當系統參數大范圍變化、存在不確定性或有內、外部干擾時,在保證閉環系統穩定的前提下,合理設計補償控制器,對參數大范圍變化、不確定性或內、外部干擾進行有效補償。以此保證受控系統在參數大范圍變化、具有不確定性或存在內、外部干擾的情況下,在兩個控制器的共同作用下,可保證閉環系統穩定,并使閉環系統滿足工程要求的性能。
當無“系統擾動”時,僅主控制器起作用,補償控制器無輸出;當有“系統擾動”時,通過對“系統擾動”進行估計,并作為補償控制器的輸入信號,驅動補償控制器輸出合適的補償信號來克服“系統擾動”的影響。補償控制器的這種工作模式特別適合高超聲速飛行器飛行控制系統的設計。由于可采用現有成熟的控制理論和方法(如PID控制)來設計控制器,故下面將重點研究“系統擾動”的估計和補償控制器的設計。
2 “系統擾動”的估計和補償控制器的設計
針對標稱模型已知的放射非線性系統,可采用標稱微分估計器和非線性擴張狀態觀測器(Nonlinear extended state observer,NESO)估計系統參數大范圍劇烈變化、系統的不確定性以及內、外部干擾等造成的“系統擾動”。傳統的方法利用非線性跟蹤微分器獲取了實際狀態的微分,將其與標稱微分估計模型輸出比較得到的殘差的方法簡單直觀,但是由于非線性跟蹤微分器的能力有限,殘差信號容易受到噪聲信號影響,實際工程上應用并不理想。本文考慮利用非線性觀測器技術估計“系統擾動”。
根據新型強魯棒自適應控制器的構成原理,可用“觀測器”來估計“系統擾動”。對于非線性系統來講,可用于估計“系統擾動”的非線性觀測器有非線性干擾觀測器、滑模干擾觀測器、神經網絡干擾觀測器和擴張狀態觀測器 (Extended state observer,ESO)[2]。非線性干擾觀測器的輸出為系統的干擾,且需要已知系統的所有狀態;滑模干擾觀測器可以同時估計系統的狀態和干擾,但是由于引入輸出誤差的變結構校正,容易引入顫振現象;神經網絡干擾觀測器的輸出為系統的干擾,但是訓練復雜,且學習時間較長。因此,本文主要研究利用非線性擴張狀態觀測器NESO(Nonlinear extended state observer)來估計“系統擾動”,并基于NESO的輸出來設計補償控制器。
2.1 擴張狀態觀測器NESO的設計
擴張狀態觀測器是一種基于輸出誤差校正的狀態觀測器,它不僅可給出控制對象的狀態量,還可以估計模型不確定性和擾動的實時值,實時值即為擴張狀態,故稱為擴張狀態觀測器[5-6]。
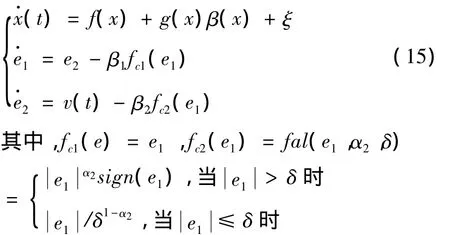
設帶有系統擾動的n階仿射非線性系統為:
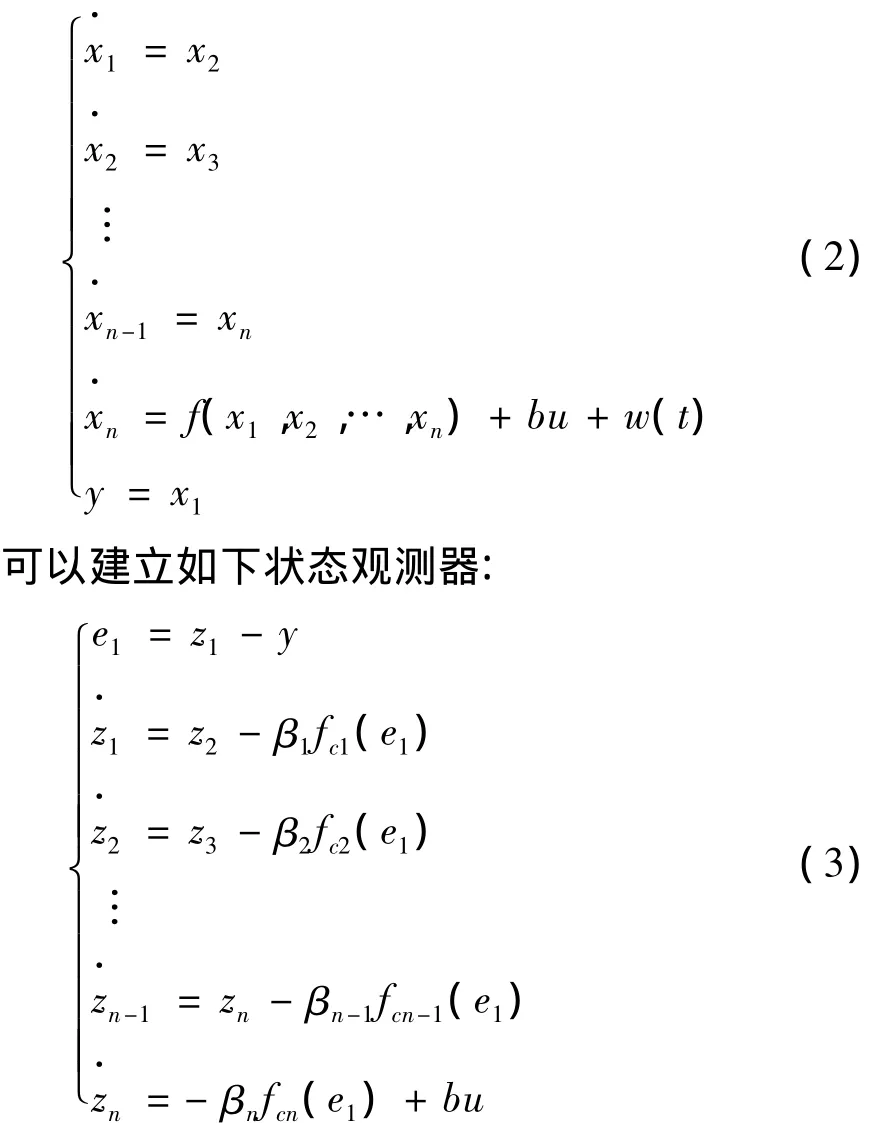
式中,β1,β2,…βn為適當的參數,fci(e1),i=1,2,…,n,是滿足條件:e1fci(e1)≥0的適當的非線性函數。
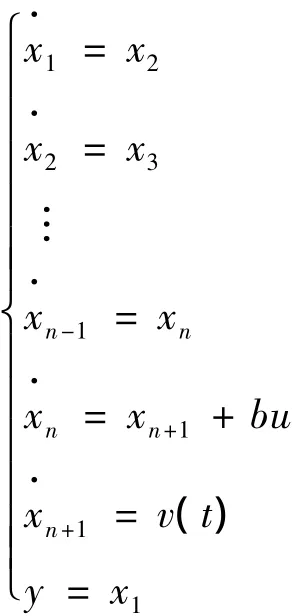
把作用于開環系統的加速度函數f(x1,x2,…,xn)和干擾擴張成新的狀態變量xn+1,記為xn+1=f(x1,x2,…,xn)+w(t),并假設x·n+1=v(t),那么系統 (2)可以擴張成新的系統:
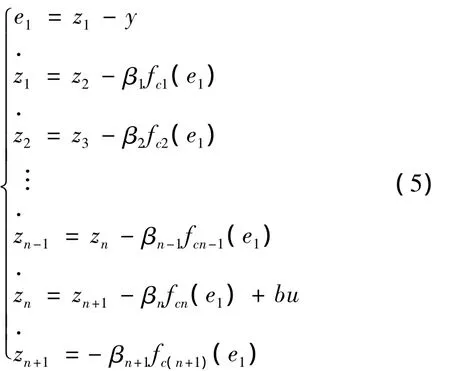
按式 (3)對擴張的系統建立擴張狀態觀測器

2.2 基于NESO的“系統擾動”估計
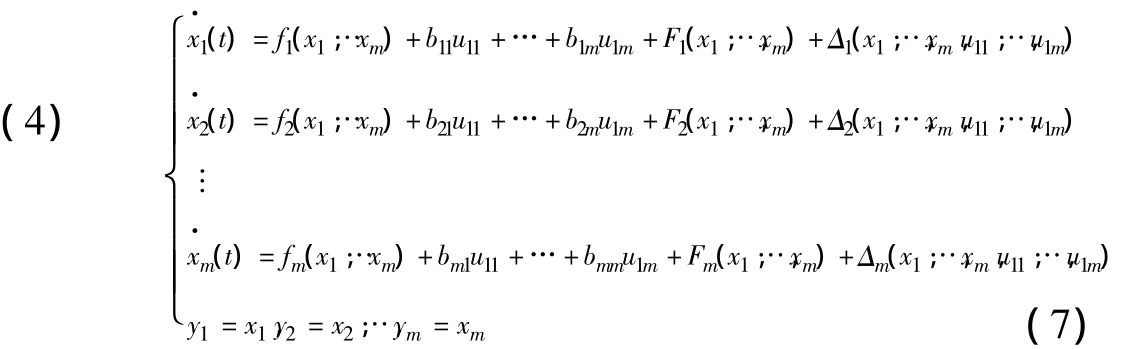
對于飛行控制系統等一類多輸入多輸出放射非線性系統,若系統標稱模型已知,“系統擾動”可能為系統的參數變化、干擾輸入或不確定性,則可基于NESO來估計多變量系統的“系統擾動”。假定:
只要適當的選擇參數 β1,β2,…βn,βn+1,這個系統也能很好的估計系統 (4)的狀態變量以及被擴張的狀態變量,即滿足:

狀態xn+1稱被擴張狀態。可以看出ESO是一種基于輸出誤差校正的狀態觀測器 (Extended state observer,ESO),它不僅給出控制對象的狀態量,還可以估計不確定性模型和擾動總和的實時值,實時值即為擴張狀態。根據輸出誤差的線性和非線性誤差校正方式,擴張狀態觀測器分為線性擴張狀態觀測器 (Linear extended state observer,LESO)和非線性擴張狀態觀測器 (Nonlinear extended state observer,NESO)兩種。式 (5)中,若取fci(ei)=e1,則 (5)為LESO,若取函數fal(e,α,δ)作為非線性函數fci(e1)的一般形式 (6),則(5)為 NESO[7-8]。
是m輸入-m輸出的系統,控制量的放大系數bij
為已知的狀態變量的函數且可逆,f=[f1f2… fm]為已知的非線性函數,Fi(x1,…,xm,uf)為由系統的參數變化、干擾輸入引起的對第i個狀態量的未知擾動量,Δi(x)為未知不確定性對第i狀態量的影響。記

并引入“虛擬控制量”U=B u1。系統方程(7)變為

系統中第i個通道的輸入輸出關系為:
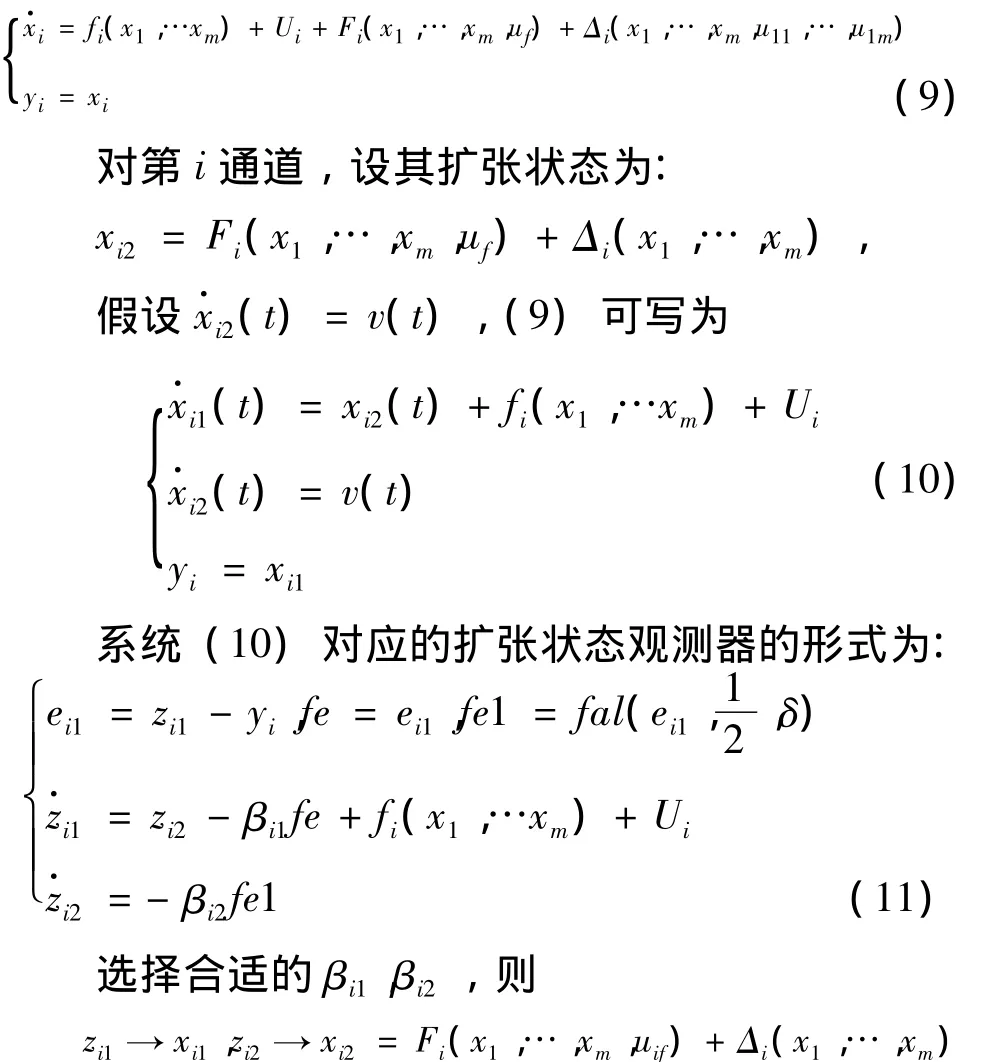
如果該通道上沒有任何不確定性和干擾,則zi2→0;一旦該通道上存在不確定性和干擾,則zi2的估計值表示該通道上擾動值的總和的大小。式 (11)的離散形式為:
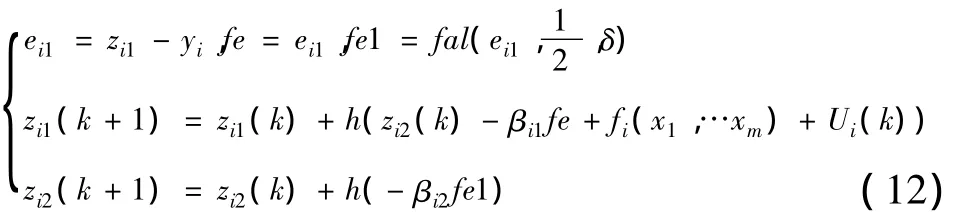
基于擴張狀態觀測器的擾動估計原理如圖5所示。
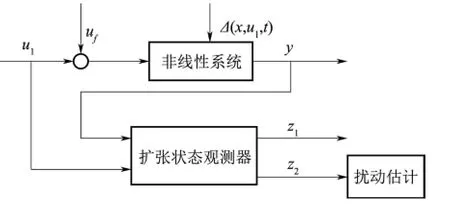
圖5 基于擴張狀態觀測器的擾動估計Fig.5 Disturbance estimation based on NESO
2.3 基于NESO的補償控制器設計
根據擴張狀態觀測器的原理,基于NESO的補償控制器的設計如下。
擴張狀態zn+1→g(x)uf(t)+Δ(x),則補償控制律為:

加入補償控制后,定義ξ=g(x)uf(t)+Δ(x)-zn+1,閉環系統方程變為:加入補償控制后的系統和擴張狀態觀測器一起構成的整個閉環系統為:

v(t)為假設的擴張狀態的導數。
可以證明[4],在新型強魯棒自適應控制器構型下,當系統沒有受到“系統擾動”的干擾時,只要設計的主控制器+被控對象組成的閉環系統是穩定的且具有工程要求的性能。而當系統中出現擾動時,補償控制器輸出的補償控制信號加入系統后,在主控制器和補償控制器共同作用下,可保證在閉環系統穩定,且具有良好的性能。
3 高超聲速飛行器新型強魯棒自適應控制器設計
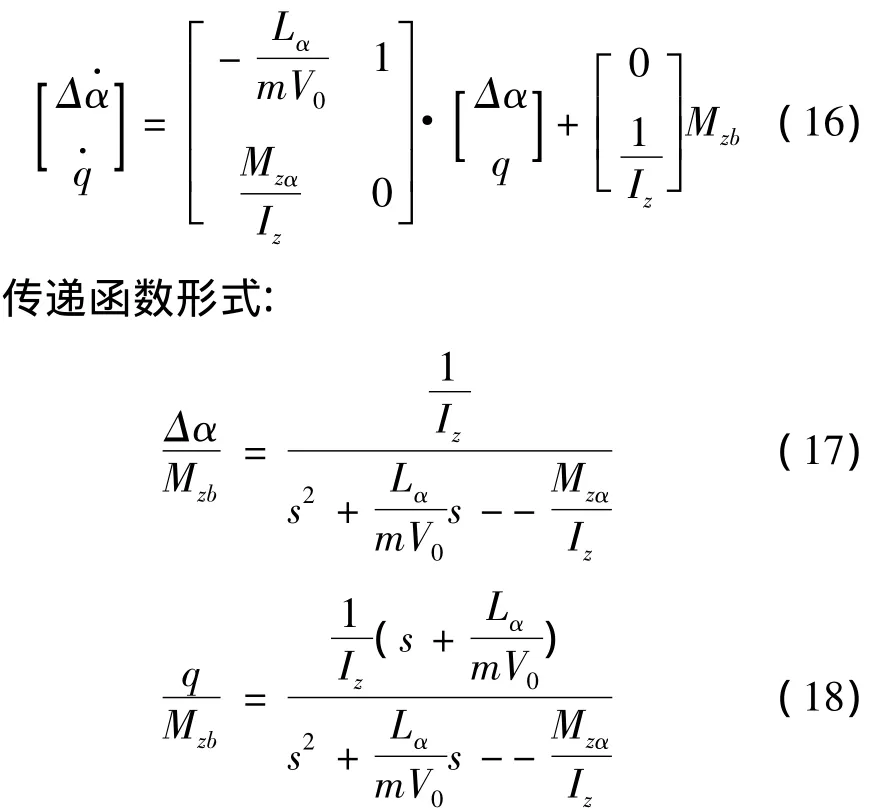
在新型強魯棒自適應控制器設計中,主控制器可采用成熟的控制方法來設計,本文采用PID控制器。首先利用小擾動線性化方法得到高超聲速飛行器縱向通道線性化模型,列寫如下:
狀態空間表達式:
選取合適平衡點,確定在平衡點上的模型參數,針對每個確定的模型設計相應的PID控制器。
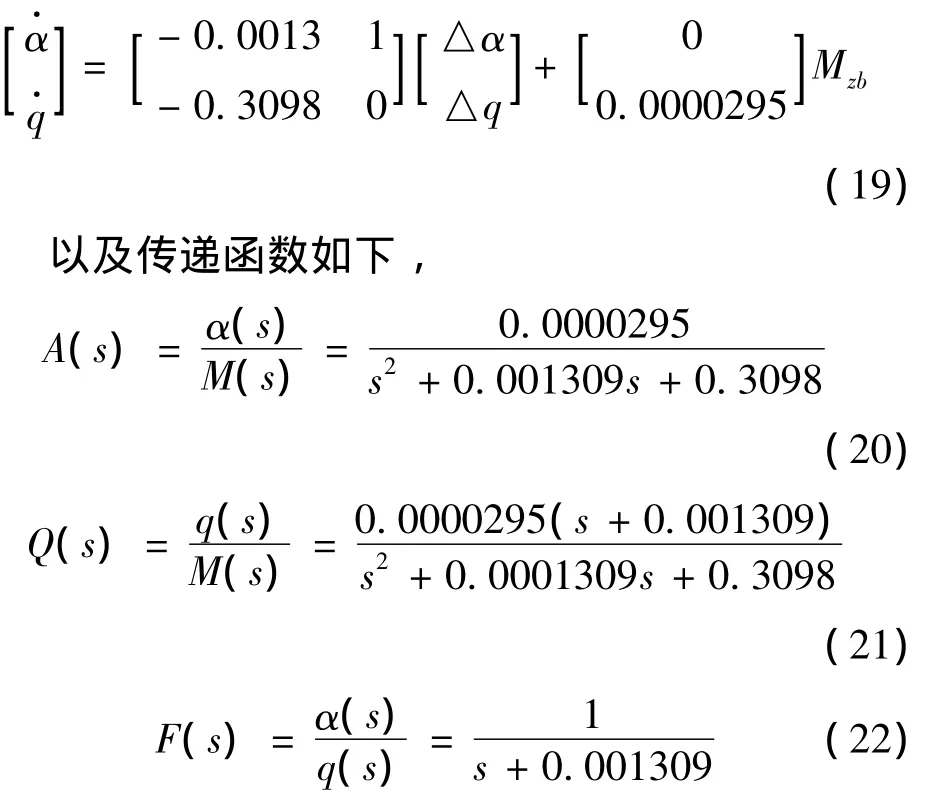
根據標準彈道,可以確定高度h=45345m時,攻角α=40°,飛行速度V=2433m/s,側滑角為β=0°,傾側角γs=0°,可得到此時的簡化模型為:
針對高超聲速飛行器特點,其姿態控制系統采用內外環控制系統結構。選取PID控制器結構如圖6所示。
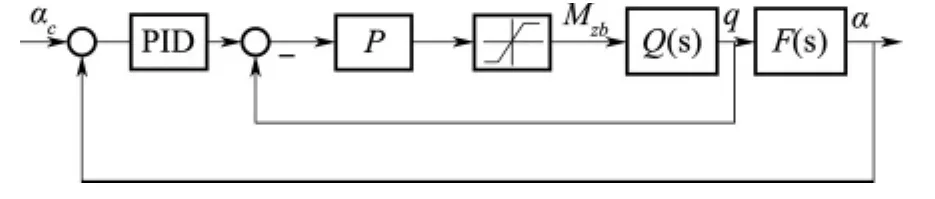
圖6 縱向PID控制結構圖Fig.6 Longitudinal PID controller
對于補償控制器的設計,采用基于NESO的擾動估計器設計和補償控制器設計,其控制器結構如圖7所示。
a)首先,選取彈道上某特征點:飛行高度45345 m,飛行速度2433 m/s,針對線性模型的攻角指令為單位階躍信號,針對非線性模型的攻角指令為40°~38°的階躍信號。
b)主控制器參數:
根據PID控制器參數理論設計結果和實際仿真效果,進行適當調整之后,確立PID控制器參數為:KP=150,KI=3,KD=50。內環反饋控制增益K=30。
c)NESO參數:
根據NESO理論給出的經驗參數和實際仿真效果,確立NESO 參數為:β1=300,β2=800,a=0.25,δ=0.0025。
d)補償控制器參數:補償控制律為:ucf(t)=-z,z由NESO估計得到。33
4 仿真結果及分析
(1)對線性化模型的仿真驗證
縱向小擾動線性化模型的參數不拉偏情況下,利用PID主控制器的控制效果如下:
考慮將俯仰力矩系數Cm拉偏30%,考察PID控制器和PID+NESO控制器的效果如圖9。
仿真結果表明,在正常情況下,PID控制器具有較好的控制效果,基本沒有超調和穩態誤差,但在模型參數進行一定程度的拉偏之后,僅采用PID控制器的控制效果變差,出現了較大的超調和震蕩,而采用PID+NESO的新型強魯棒自適應控制器較好的改善了控制效果。新型強魯棒自適應控制器對于參數偏差等具有強魯棒性。
(2)對縱向非線性化模型的仿真驗證
特征點、控制器設定如上,面向非線性模型進行仿真,考察控制器性能。
縱向非線性模型的參數不拉偏情況下,利用PID主控制器的控制效果如圖10。
將俯仰力矩系數拉偏30%,利用PID控制器和PID+NESO控制器的控制效果如圖11。
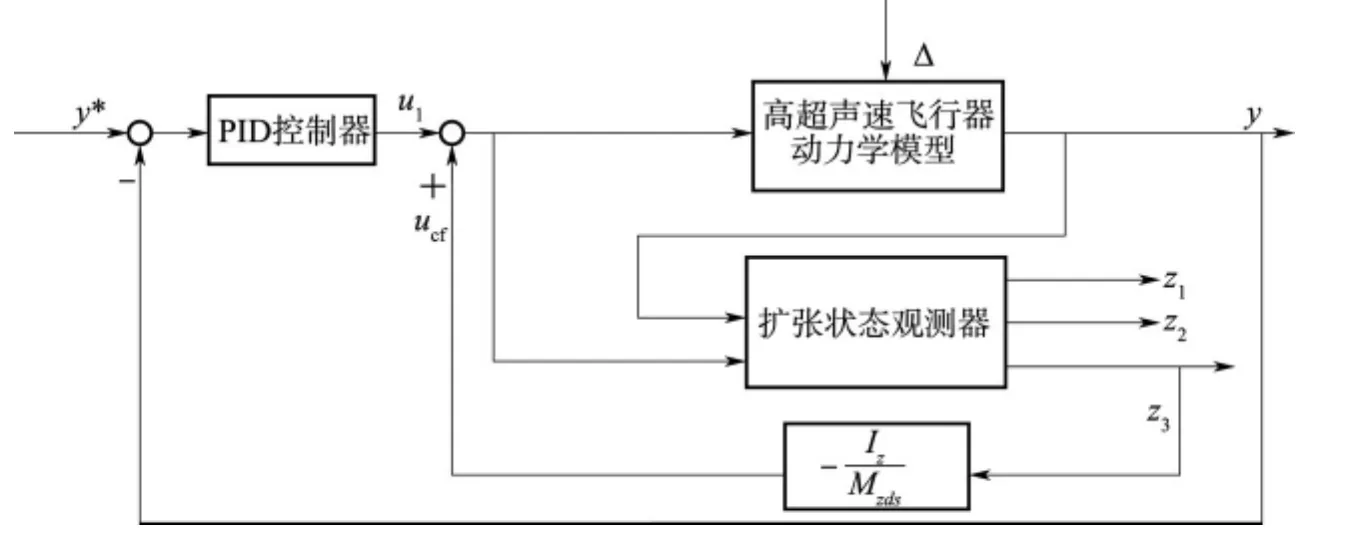
圖7 基于NESO新型強魯棒自適應控制系統Fig.7 The scheme of novel strength robustness adaptive controller based on NESO
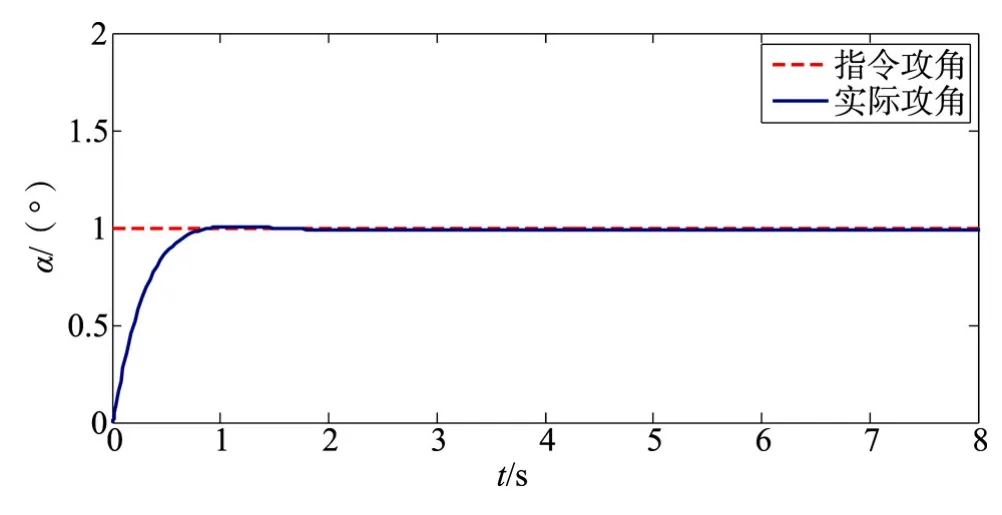
圖8 在參數不拉偏情況下,PID控制器用于線性模型的攻角跟蹤圖Fig.8 The PID controller for the linear model of angle of arrack when parameter does not bias
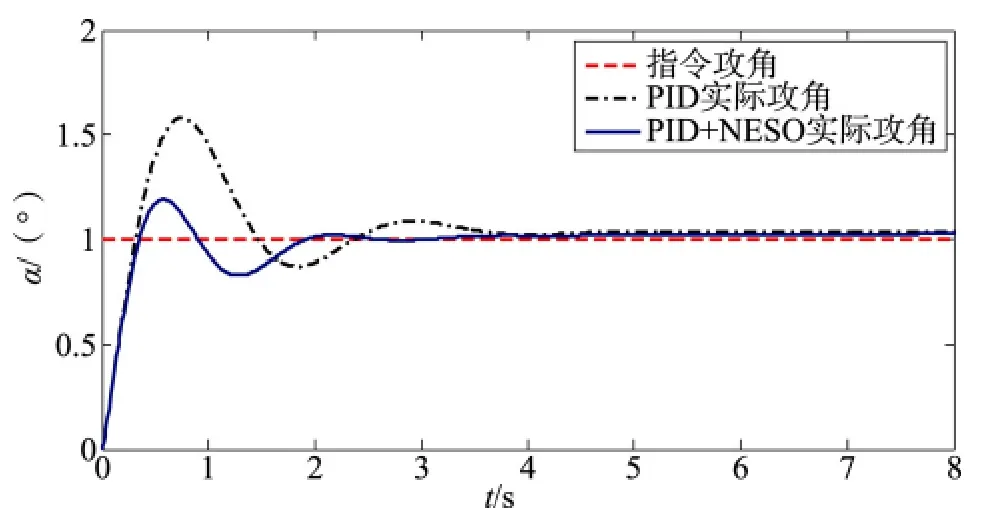
圖9 在參數拉偏情況下,PID+NESO控制器用于線性模型的攻角跟蹤圖Fig.9 The PID+NESO controller for the linear model of angle of arrack when parameter bias
(3)跟蹤全程攻角制導指令的仿真驗證
為了驗證新型強魯棒自適應控制器的控制效果,對于高超聲速飛行器再入返回飛行過程中的全程彈道制導指令,考察飛行器高度從70km到25km下降過程中對制導攻角指令的跟蹤情況,其攻角指令由40°變為10°。
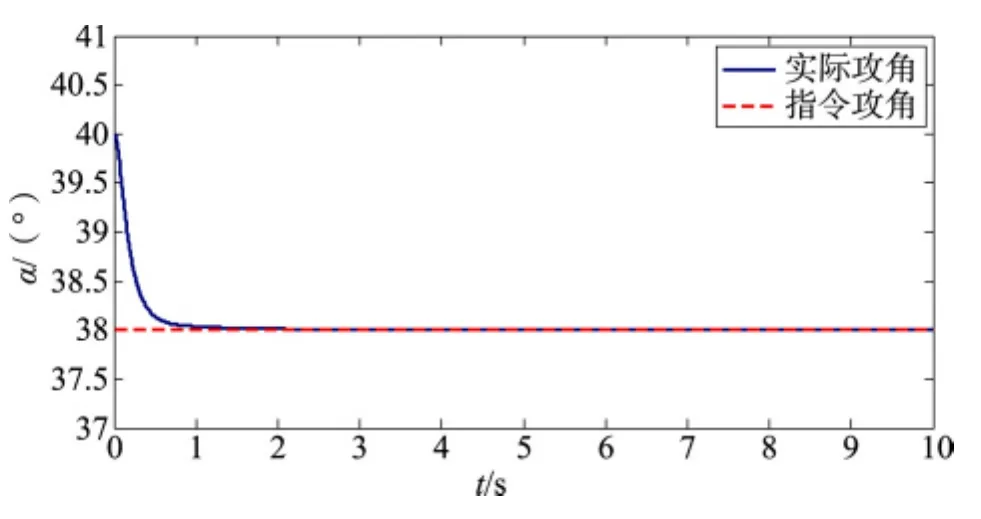
圖10 在參數不拉偏情況下,PID控制器用于非線性模型的攻角跟蹤圖Fig.10 The PID controller for the nonlinear model of angle of arrack when parameter does not bias
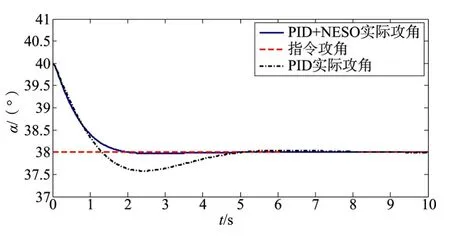
圖11 在參數拉偏情況下,PID控制器和PID+NESO控制器用于非線性模型的攻角跟蹤圖Fig.11 The PID and PID+NESO controller for the nonlinear model of angle of arrack when parameter bias
首先,在參數不拉偏情況下,僅采用PID控制器和采用PID+NESO控制器的全彈道制導指令跟蹤圖如下所示,圖11和圖12是全彈道中攻角指令隨時間變化情況以及跟蹤效果,圖13和圖14是攻角指令隨高度變化情況以及跟蹤效果:
由以上仿真結果可見,僅采用PID控制器,在飛行器攻角建立過程中會有較大超調和一定的震蕩,而采用PID+NESO控制器,減小了超調,基本消除了震蕩。在之后的過程中,兩種控制器都可以獲得較好的跟蹤效果。
其次,將俯仰力矩系數拉偏30%,僅采用PID控制器和采用PID+NESO控制器的全彈道制導指令跟蹤圖如下所示。其中,圖15和圖16是全彈道中攻角指令隨時間變化情況以及跟蹤效果;圖17和圖18是攻角指令隨高度變化情況以及跟蹤效果。
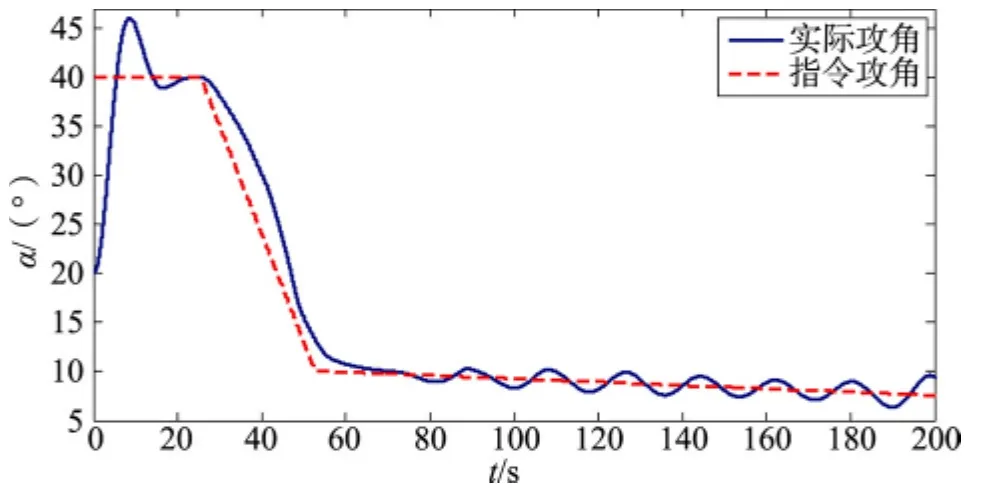
圖16 參數拉偏采用PID控制器的制導指令隨時間變化跟蹤圖Fig.16 The PID controller for the guidance command with time when parameter bias
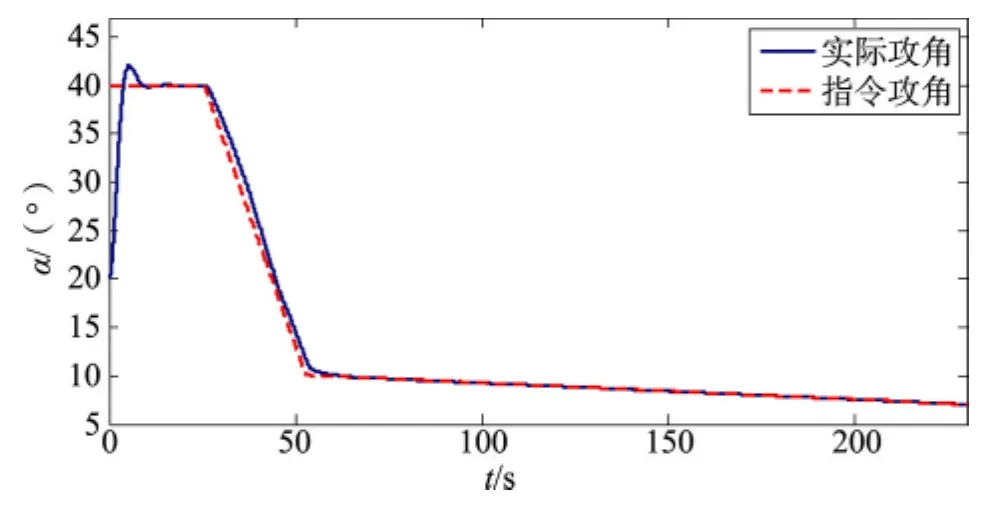
圖12 參數不拉偏采用PID控制器的制導指令隨時間變化跟蹤圖Fig.12 The PID controller for the guidance command with time when parameter dose no bias
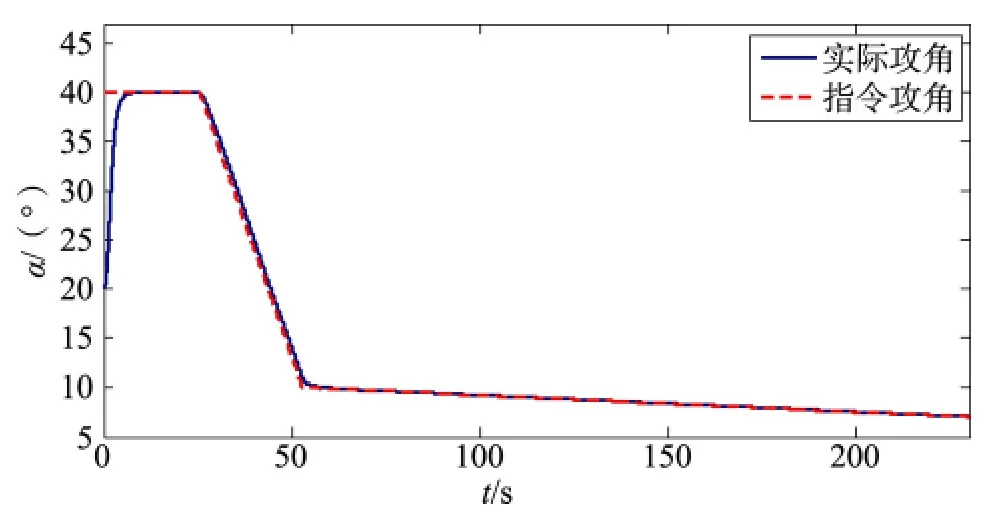
圖13 參數不拉偏采用PID+NESO控制器的制導指令隨時間變化跟蹤圖Fig.13 The PID+NESO controller for the guidance command with time when parameter dose no bias
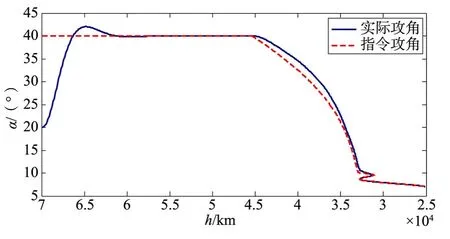
圖14 參數不拉偏采用PID控制器的制導指令隨高度變化跟蹤圖Fig.14 The PID controller for the guidance command with altitude when parameter dose no bias
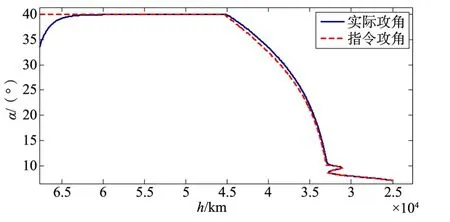
圖15 參數不拉偏采用PID+NESO控制器的制導指令隨高度變化跟蹤圖Fig.15 The PID+NESO controller for the guidance command with altitude when parameter dose no bias
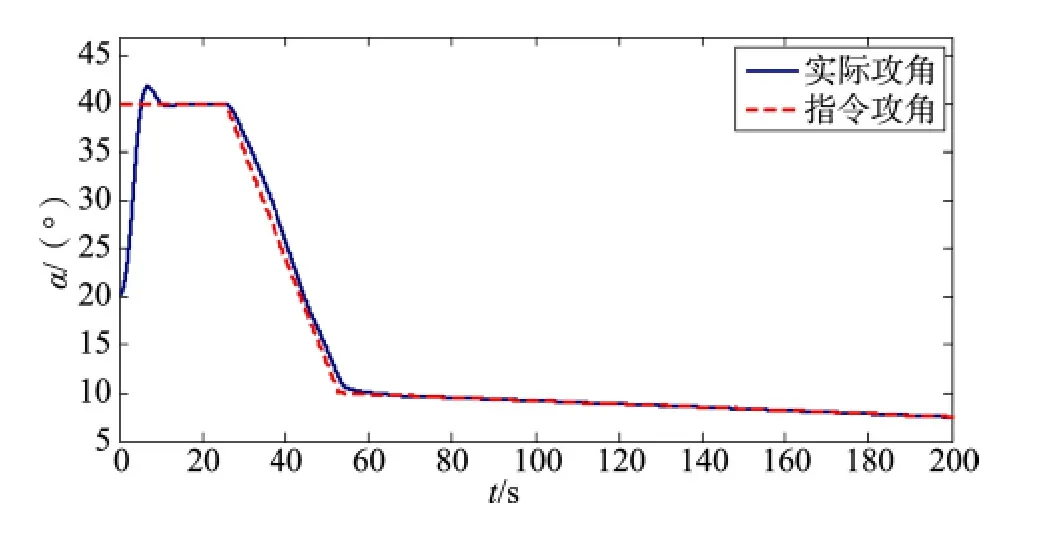
圖17 參數拉偏采用PID+NESO控制器的制導指令隨時間變化跟蹤圖Fig.17 The PID+NESO controller for the guidance command with time when parameter bias
由以上仿真結果可見,僅采用PID控制器,由于參數偏差的影響,在整個仿真飛行過程中,實際攻角對指令攻角的跟蹤效果較差;而采用PID+NESO控制器,在仿真開始階段有一定的超調,而在其它仿真飛行階段仍然具有較好的跟蹤效果。說明PID+NESO的新型強魯棒自適應控制器克服了參數偏差所帶來的影響,具有較好的魯棒性。
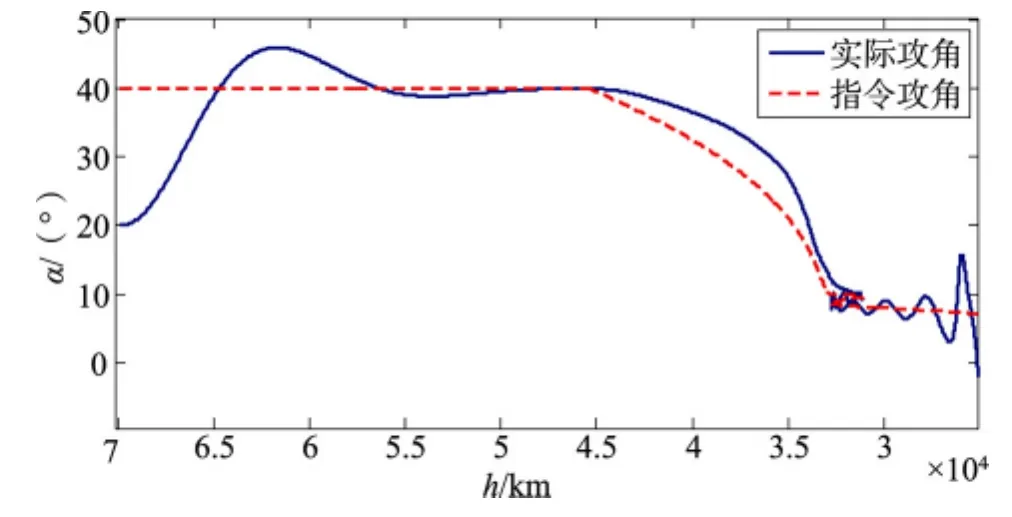
圖18 參數拉偏采用PID控制器的制導指令隨高度變化跟蹤圖Fig.18 The PID controller for the guidance command with altitude when parameter bias
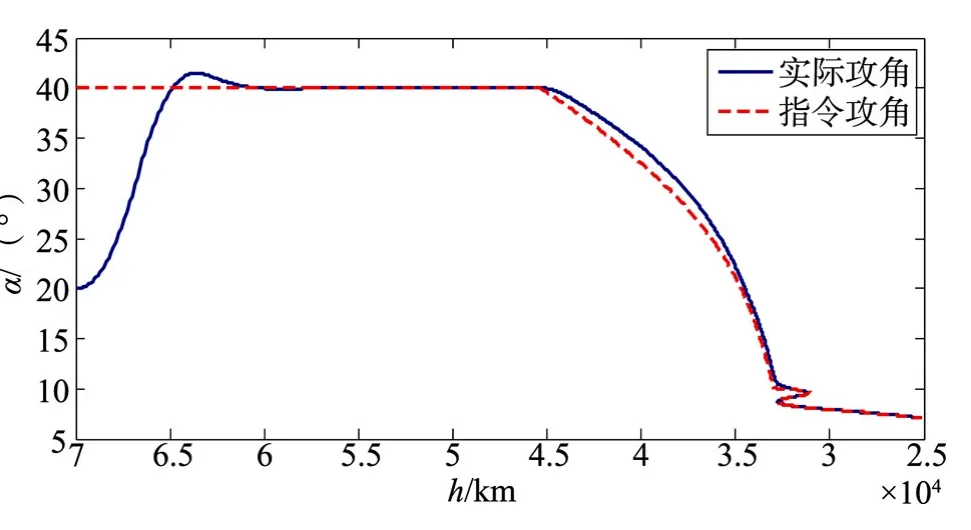
圖19 參數拉偏采用PID+NESO控制器的制導指令隨高度變化跟蹤圖Fig.19 The PID+NESO controller for the guidance command with altitude when parameter bias
5 結論
本文通過分析高超聲速飛行器的特點,將自適應控制技術和魯棒控制方法相結合,提出一種新型強魯棒自適應控制器構型。在此構型的基礎上,采用非線性擴張狀態觀測器來估計因大空域、高動態飛行帶來的系統參數大范圍劇烈變化、嚴重不確定性以及內、外部強烈干擾所形成的“系統擾動”。通過設計合適的補償控制器,對“系統擾動”進行補償。在主控制器和補償控制器的共同作用下,不僅可保證整個閉環系統穩定,且可使閉環系統滿足工程要求的性能。仿真結果表明,新型強魯棒自適應控制器對于參數偏差的影響具有強魯棒性。同時,新型強魯棒自適應控制器分為主控制器+補償控制器,且主控制器、補償控制器可分開設計,這種設計思路具有廣闊的工程應用前景。
[1]李智斌,李果,王大軼等.近空間飛行器動力學與控制的研究現狀及難點[C].動力學與控制及航天應用論文集.北京,中國,2008:120-142.[LI Zhi-bin,LI Guo,WANG Da-zhi.Present situation and problems of near space vehicle dynamics and control[C].The dynamics and control of space application,Beijing,2008,120 -142.]
[2]Zhou Keming;Ren Zhang.A new controller architecture for high performance,robust,and fault- tolerant control[J].IEEE Transactions Automatic Control.2001.46(10):1613 -1618.
[3]王偉.新型魯棒容錯控制方法研究[D].北京:北京航空航天大學博士學位論文,2009.[WANG Wei,Resarch on A New Robust Fault-tolerant Control Method[D].Beijing,Doctoral Dissertation of Beihang University,2009.]
[4]Wang Wei,Hameed Tahir,Ren Zhang.Extended State Observer-based Robust Fault-tolerant Controller for Flight Control Surface Failures[C].The Proceeding of 9th International Conference on Electronic Measurement & Instruments(ICEMI’09).Beijing,2009:610-615.
[5]王偉,陳璐璐,任章.一種新型魯棒容錯控制器在飛控系統中的應用 [J].系統仿真學報.2011,23(1),104-107.[WANG Wei,CHEN Lu - lu,REN Zhang.Application of New Robust Fault- tolerant Controller in Flight Control System [J],Journal of System Simulation,2011,23(1):104 -107.]
[6]韓京清.自抗擾控制技術 [M].北京:國防工業出版社,2008. [HAN Jing-qing.Active Disturbance Rejection Control Technique[M]. Beijing, National Defense Industry Press,2008.]
[7]黃一,韓京清.非線性連續二階擴張狀態觀測器的分析與設計[J].科學通報,2000,45(23):1373-1379.[HUANG Yi,HAN Jing-qing.Analysis and design of continuous two order extended state observer of nonlinear [J].Chinese Science Bulletin,2000,45(23):1373 -1379.]
[8]李菁菁;任章;曲鑫.機動滑翔飛行器的自抗擾反步高精度姿態控制[J].系統工程與電子技術.2010,32(8):1711-1721.[LI Jing-jing,REN Zhang,QU Xin.Design of active disturbance rejection backstepping attitude controller for maneuvering glide vehicles [J].Systems Engineering and Electronics,2010,32(8):1711 -1721.]
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
藝術啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
