基于PLC控制的模糊自整定PID變量噴霧控制系統
2014-07-05 16:25:01董志明宋樂鵬
山東農業大學學報(自然科學版) 2014年4期
關鍵詞:調節閥
董志明,宋樂鵬
重慶科技學院電氣與信息工程學院,重慶401331
基于PLC控制的模糊自整定PID變量噴霧控制系統
董志明,宋樂鵬
重慶科技學院電氣與信息工程學院,重慶401331
變量噴霧控制系統具有非線性、時變性、大滯后等特點,常規PID控制不能滿足變量噴霧控制系統在實際作業中理想的控制效果。因此提出了一種基于PLC控制的模糊自整定PID控制方法。PLC控制的模糊自整定PID控制結合了PLC控制靈活、多變和自適應模糊控制等特點,通過對變量噴霧控制系統的數學建模,建立了以電動PI調節閥為核心的模糊自整定PID控制系統。利用Matlab/Simulink和模糊邏輯工具箱對普通模糊PID控制系統和基于PLC控制的模糊自整定PID控制系統進行Simulink仿真研究。實驗結果表明,基于PLC控制的模糊自整定PID控制比常規PID控制在非線性、時變性、減小超調量的方面具有更好的控制品質。
變量噴霧控制系統;PL;模糊自整定PID控制
壓力和流量是變量噴霧控制系統中的重要物理參數,而一般的變量噴霧控制系統受環境、器材誤差的影響較大,具有非線性、時變性、大滯后等特點。常規PID控制至適應于理想的線性控制系統[1],對于這種具有非線性、時變性、大滯后等特點的控制系統不能滿足控制要求,達不到理想的控制效果。因此對于這一缺點,本文提出了一種基于PLC控制的模糊自整定PID控制的變量噴霧控制系統[2]。其基本思路是利用PLC的靈活方便和模糊邏輯控制工具箱對PID控制器進行在線調整,滿足其控制要求。通過MATLAB仿真[3]表明,基于PLC控制的模糊自整定PID控制比常規PID控制在魯棒性、超調量調節等有更好的控制效果。
1 被控對象的選定
變量噴霧控制系統選取電動PI調節閥為被控對象,調節閥是可調開度,繼而控制系統噴霧量的大小。根據變量噴霧控制系統的壓力、流量傳感器的反饋數據,控制電動調節閥開度的大小。電動調節閥本身是一種比較復雜的控制系統,可以簡單的看做是一個純滯后的二階系統來描述[3]:

式中:K——放大系數;τ——純滯后時間;T1和T2——時間系數。
在實際的系統中,K、T、τ0等參數會隨著變量噴霧控制系統的壓力、流量以及環境溫度等因素而變化。
2 模糊自整定PID控制器的設計
常規PID控制器系統主要由PID控制器和被控對象組成,其控制規律為:

式中,e(t),u(t)分別為PID控制器的輸入和輸出,Kp為比例系數,Ki為積分時間常數,Kd為微分時間常數。e(t)=r(t)-y(t)為偏差信號,u(t)為控制變量r(t)為設定的參考輸入值。
2.1模糊自整定控制的結構圖
模糊自整定PID控制器以誤差e和誤差變化ec作為輸入(利用模糊規則在線對PID參數進行修改),可以滿足不同時刻的e和ec對PID參數自整定的要求。利用模糊控制規則在線對PID參數進行修改,便構成了模糊自整定PID控制器。
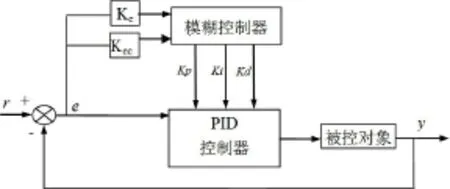
圖1 模糊自整定PID結構圖Fig.1 Fuzzy self-tuning PID structure diagram
2.2模糊自整定PID控制器算法設計
根據變量噴霧控制系統的物理模型和專家經驗,選擇誤差e和誤差變化ec作為模糊控制器的輸入變量;ΔKp、ΔKi、ΔKd為模糊控制器的輸出。經過模糊化處理得到模糊語言變量E和Ec,其模糊子集均為{NB,NM,NS,ZR,PS,PM,PB},同理輸出的ΔKp、ΔKi、ΔKd的模糊子集也均為{NB,NM,NS,ZR,PS,PM,PB}。選取模糊語言變量E、Ec以及ΔKp、ΔKi、ΔKd的論域均為{-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6},并且E、Ec服從三角形隸屬函數曲線分布,ΔKp、ΔKi、ΔKd則服從高斯型隸屬函數曲線分布。在Mat lab命令窗口中鍵入Fuzzy命令,打開Fiseditor,進入Member ship function editor,編輯輸入、輸出量的隸屬度函。
2.3模糊自整定PID控制規則表及模糊推理
根據變量噴霧控制系統的物理模型和專家經驗,選擇誤差e和誤差變化ec作為模糊控制器的輸入變量;ΔKp、ΔKi、ΔKd為模糊控制器的輸出[6]。經過模糊化處理得到模糊語言變量E和Ec,其模糊子集均為{NB,NM,NS,ZR,PS,PM,PB},同理輸出的ΔKp、ΔKi、ΔKd的模糊子集也均為{NB,NM,NS,ZR,PS,PM,PB}。選取模糊語言變量E、Ec以及ΔKp、ΔKi、ΔKd的論域均為{-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6},并且E、Ec服從三角形隸屬函數曲線分布,ΔKp、ΔKi、ΔKd則服從高斯型隸屬函數曲線分布。在Matlab命令窗口中鍵入Fuzzy命令,打開Fiseditor,進入Member ship function editor,編輯輸入、輸出量的隸屬度函如圖2、3、4所示:

圖2 E的隸屬函數曲線Fig.2 Membership function curve of E
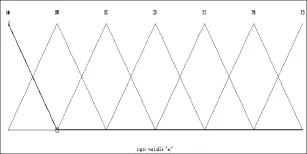
圖3 Ec的隸屬函數曲線Fig.3 Membership function curve of Ec

圖4 ΔKp、ΔKi、ΔKd的隸屬函數曲線Fig.4 Membership function curve of ΔKp、ΔKi、ΔKd
通過模糊自整定優化后的模糊控制規則表如表1、2、3所示,其中:ΔKP為模糊控制輸出PID參數中P的增量,ΔKi為模糊控制輸出PID參數中I的增量,ΔKd為模糊控制輸出PID參數中D的增量,E為誤差,EC為誤差變化率。
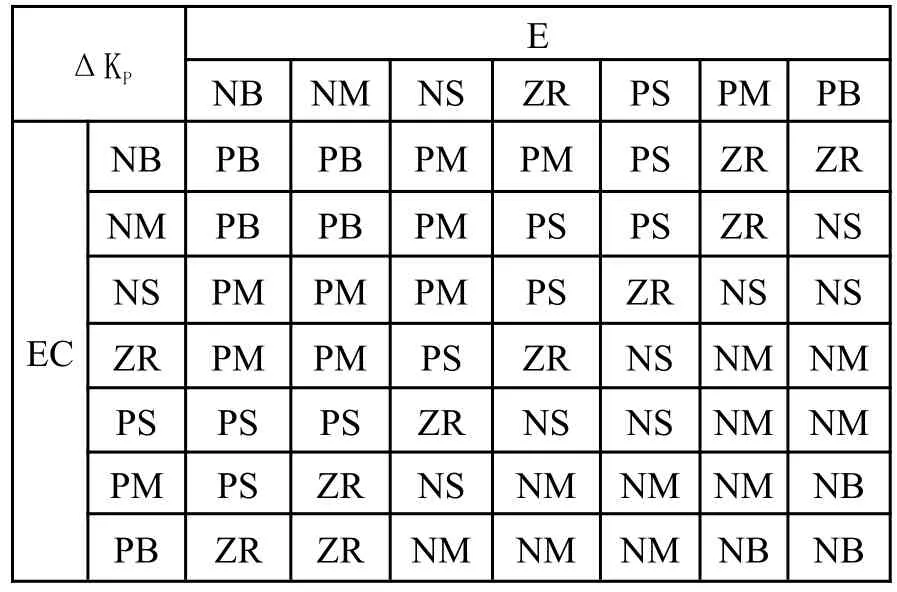
表1 ΔKp模糊控制規則表Table 1 The fuzzy control rules of ΔKP

表2 ΔKi模糊控制規則表Table 2 The fuzzy control rules of ΔKi

表3 ΔKd模糊控制規則表Table 3 The fuzzy control rules ofΔK
模糊自整定PID控制器工作流程圖如圖5所示:

圖5 PID控制器流程圖Fig.5 Flow chart of PID controller
3 仿真結果
采用MATLAB對模糊自整定PID控制的變量噴霧控制系統的模型進行仿真[4],在MATLAB的仿真軟件中,采用Simulink和模糊邏輯控制箱實現模糊自整定PID控制。據已建立的數學模型推導出變量噴霧控制系統的傳遞函數如下:

在Simulink中對常規PID控制的變量控制系統進行仿真,其常規PID的三大參數分別為Kp=3.0,、Ki=1.0、Kd=0.9。其仿真結果如下圖6、7所示:

圖6 常規PID仿真圖Fig.6 The simulation of conventional PID
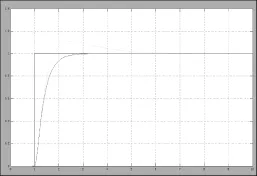
圖7 模糊自整定PID仿真圖Fig.7 The simulation of fuzzy self-tuning PID
由上述及MATLAB仿真結果可以看出常規PID控制的超調量比較大,大約有32%。而模糊自整定PID控制則超調量比較小約為1.3%。因此模糊自整定PID控制優于常規PID控制。
4 變量噴霧控制系統PLC控制
4.1變量噴霧控制系統主程序設計
變量噴霧控制系統的電動調節閥,以西門子PLC的S7-200編程軟件編程來控制電動調節閥,變量噴霧控制系統的全部功能由PC機配合相關的外圍電路實現。
4.2變量噴霧控制系統子程序設計
變量噴霧控制系統程序設計過程中,為了提高程序設計的效率,采用結構化和模塊化的程序設計思想。整個程序分為3個功能模塊進行設計,分別為壓力傳感器的PID控制子程序、流量傳感器的PID控制子程序和模擬信號給定PID子程序。

圖9 壓力傳感器PID模塊流程圖Fig.9 Flow chart of pressure sensor PID module
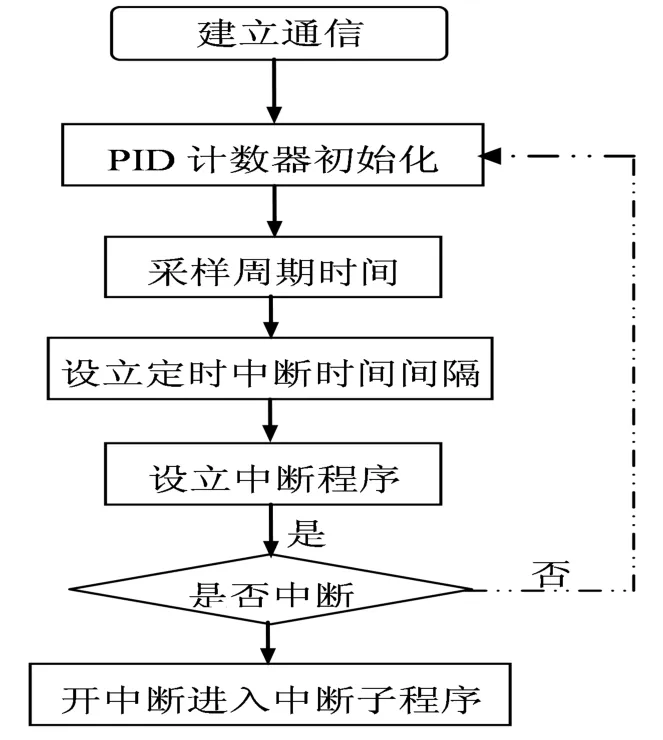
圖8 系統的主程序流程圖Fig.8 Main program flow chart of the system
4.2.1 壓力傳感器的PID控制子程序為了在實驗中能夠得到壓力測量較高的精確值,需要對壓力傳感器進行PID程序的編程,其流程圖如下圖9所示。
流量傳感器在實驗中測量水流量的大小,在控制過程中要得到較精確的數據,其PID程序流程圖同壓力傳感器大致相同。
4.2.2 模擬信號給定PID子程序為了能使電動調節閥有明確的信號輸入,使調節閥能夠按照人為的思想進行開度的調節,達到預期的試驗效果。因此在PID控制子程序中加入人為給定的一個模擬量信號(圖10)。
4.3變量噴霧控制系統中斷程序設計
變量噴霧控制系統中斷程序滿足結構化程序的特點,提高程序設計的效率。其最大的特點就是響應迅速,在觸發中斷源后,它可以終止程序的執行,轉而執行中斷程序加快了程序進程。變量噴霧控制系統的中斷PID控制流程圖如圖11所示:

圖10 模擬給定信號PID流程圖Fig.10 PID flow chart of given analog signal
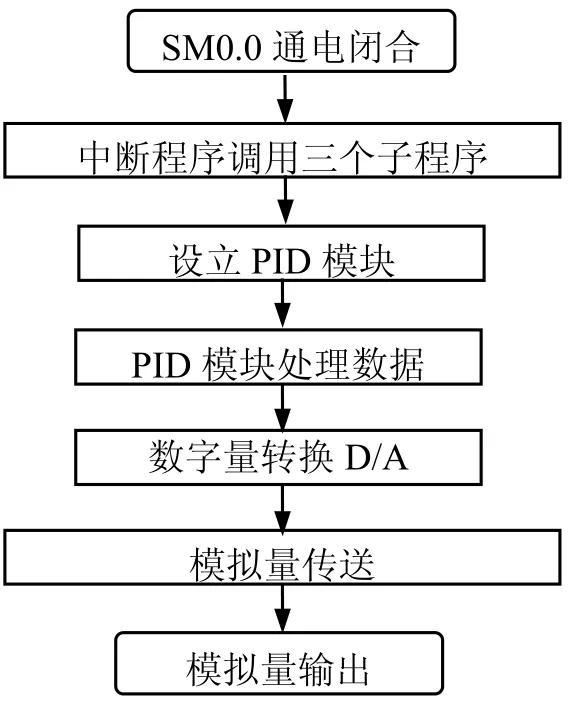
圖11 中斷程序PID流程圖Fig.11 PID flow chart of interrupt program
4.4變量噴霧控制系統PLC控制效果
在PLC中編寫自適應模糊變量規則表,根據輸入誤差和誤差變化率,通過模糊規則表查表求得模糊輸出,將模糊輸出反模糊化,反模糊化的結果控制變量噴霧閥的電機,進而控制變量噴霧的噴霧量。經過實驗表明,PLC控制變量噴霧效果為:模糊PID控制的超調量最大不超過5.6%,響應時間為0.78 s,峰值時間為1.56 s,該效果完全達到精準農業噴霧求。
5 結論
針對復雜的變量噴霧控制系統,本文提出了基于PLC控制的模糊自整定PID控制器。總結這種控制器的控制特點,通過仿真實驗結果表明,模糊自整定PID控制具有良好的調節效果。在超調量、控制精度、魯棒性等性能上優于常規PID控制效果,具有很好的控制精度,超調量很小,控制效果和魯棒性好。
[1]林屹,葉小嶺.模糊自校正PID液位串級控制系統設計與仿真[J].實驗室研究與探索,2010,29(3):17-20
[2]姚永剛,孟昕元,張雷.一種非線性PID控制算法在卡車ABS中的應用及仿真研究[J].機械科學與技術,2006,25(8): 956-959
[3]胥軍,方彥軍.模糊推理自整定PID控制及其在PROFIBUS控制器中的應用[J].儀表技術與傳感器,2006(5):35-36
[4]范子榮,張友鵬.基于溫度系統的模糊自適應PID控制器的設計與仿真[J].蘭州交通大學學報,2006,25(3):92-95
[5]曹光明,吳迪,張殿華.基于模糊自適應PID的鑄軋機結晶器液位控制系統[J].控制與決策,2007,22(4):399-402
[6]朱海榮,姜平,楊奕,等.一種模糊PID控制器在制漿蒸煮過程中的應用[J].計算機工程,2007,33(7):222-224
Fuzzy Self-tuning PID Variable Spray Control System Based on PLC Control
DONG Zhi-ming,SONG Le-peng
SchoolofElectrical&InformationEngineering,ChongqingUniversityofScienceandTechnology,Chongqing401331,China
Variable spray control system has nonlinear,time-varying,big lag,etc.Conventional PID control can't satisfy the variable spray control system in the actual operation of the ideal control effect,so as to put forward a fuzzy self-tuning PID control based on PLC control method.PLC control of the fuzzy self-tuning PID control combined with PLC control flexible, changeable and adaptive fuzzy control,etc.through the mathematical modeling of variable spray control system,set up electric PI regulator for the core of the fuzzy self-tuning PID control system.Using Matlab/Simulink and fuzzy logic toolbox to general fuzzy PID control system and fuzzy self-tuning PID control based on PLC control system with Simulink simulation.The experimental results showed that fuzzy self-tuning PID control based on PLC control had the better quality than the conventional PID control in the nonlinear,time-varying and the reduce of the overshoot amount.
Variable spray control system;PLC;fuzzy self-tuning;PID control
TP 273
A
1000-2324(2014)04-0536-05
2013-03-11
2013-04-15
重慶市應用開發計劃項目(cstc2014yykfA80012)
董志明(1974-),男,漢族,江蘇南京人,副教授,博士,主要從事自動化技術與裝備研究.
猜你喜歡
儀器儀表用戶(2023年11期)2023-10-25 01:46:48
儀器儀表用戶(2023年10期)2023-09-12 08:24:28
儀器儀表用戶(2022年11期)2022-11-03 12:38:58
儀器儀表用戶(2022年10期)2022-09-29 04:36:58
儀器儀表用戶(2022年9期)2022-08-30 05:39:48
儀器儀表用戶(2022年5期)2022-05-06 09:02:30
儀器儀表用戶(2022年4期)2022-04-01 03:17:02
儀器儀表用戶(2021年12期)2021-12-10 16:02:25
儀器儀表用戶(2021年11期)2021-11-29 02:20:36
石油化工自動化(2018年5期)2018-11-14 02:34:26