基于模糊自適應定位算法的煤礦安全定位監測系統設計
2014-06-12 06:28:48張友能李成龍
通化師范學院學報 2014年10期
關鍵詞:實驗
張友能,李成龍,丁 莉
(1.安徽工貿職業技術學院 電氣與信息工程系,安徽 淮南 232001; 2.安徽理工大學 理學院,安徽 淮南 230001)
面對國內煤礦安全生產越來越高的要求,建立可靠的井下人員定位系統對改善煤礦的安全生產管理有重要的現實意義.井下定位系統要求能夠及時、準確地將井下各個區域人員和移動設備情況反映到地面計算機系統,使管理人員能夠隨時掌握井下人員和移動設備的總數及分布狀況,從而提高生產管理效率.同時,在礦難發生時,能夠及時為救援提供有效的位置信息,有利于人員的救助.但煤礦井下無線通信環境差,多路徑效應明顯,信號衰落快,目前國內普遍使用的井下監控系統僅僅是一種人員的考勤記錄系統,很難滿足目前生產管理和救援的定位需求[1-2].無線傳感器網絡是由多學科高度交叉的新興前沿研究領域.無線傳感器網絡能夠直接獲取客觀物理信息,在軍事國防、工農業控制、環境監測、救災防控、醫療等很多領域有廣泛的應用前景[3-4],其自組織、節點隨機部署、抗干擾、抗毀性強等特點十分適合井下復雜多變的通信環境,成為井下監測和定位新的技術載體.
1 系統結構
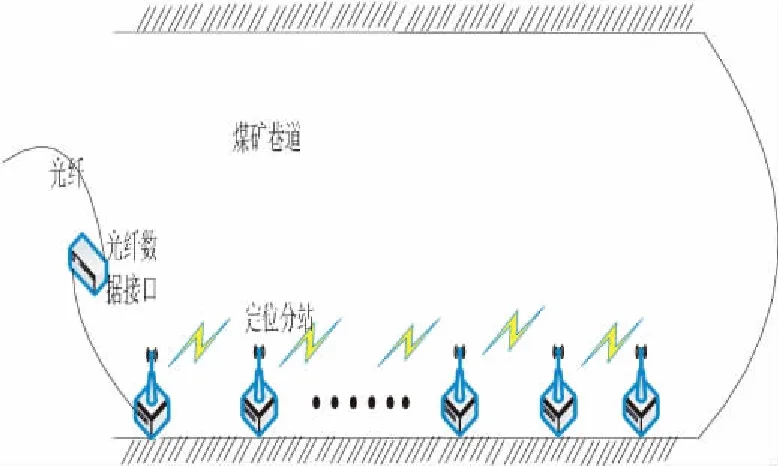
基于模糊自適應定位算法的煤礦安全監測系統以模糊算法作為監測定位技術的數學基礎,分為井下監測區域的數據采集系統和井上的控制系統.井下監測區域由基于CC2430的N個無線基站組成無線傳感網絡,直井和井上等長距離數據傳輸則采用光纖通信.地面控制系統由遠程計算機終端和控制軟件組成,與井下無線傳感網絡通過礦井以太網發送指令和傳送數據.系統結構圖如圖1所示.
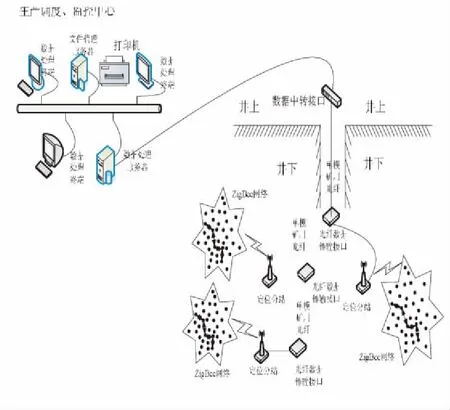
圖1 煤礦安全監測系統結構圖
2 模糊自適應定位算法
定位分站中的射頻芯片CC2430中有一個內置的接收信號強度指示器(RSSI)(Received Signal Strength Indicator),在井下目標定位中,通過讀取存儲在RSSI.RSSI_VAL寄存器中的8bit的表征接收信號強度的數字化值,使用理論或經驗的信號傳播模型將接收信號強度轉化為距離,無線信道的數學模型如式1所示.
(1)
式中,d是發射機和接收機之間的距離,d0是參考距離,n是信道衰減指數,一般取值2~4,Xσ是均值為零、方差σ的高斯隨機噪聲變量,PL(d0)是距離發射機d0處的信號強度,PL(d)是距離發射機d處的信號強度;PL(d0)可以通過經驗得出,或者從硬件規范協議得到.由此可以通過信號強度PL(d)求出距離d.信道由于受到多徑衰減和非視距阻擋的影響,具有時變特性,嚴重偏離上述模型,根據接收到的信號強度估計出距離d一般有很大誤差,可能產生50%的誤差.
對接收到的原始信號RSSI的值模糊化處理,去除信道由于受到多徑衰減和非視距阻擋的影響,提出用模糊自適應定位算法提高目標定位的精準性.本文采用包含n個隸屬度值的隸屬度向量y模糊評價原始RSSI信號.隸屬函數在符合條件的前提下可以自由構造[5],嶺形分布的隸屬函數構造簡單,函數曲線符合實踐中RSSI信號的變化規律,我們采用嶺形分布對實踐中的RSSI信號進行模糊化,模糊集FRk的隸屬函數記為μFRK(x):
則某RSSI模糊隸屬度向量記為:
y(FR1,FR2,FR3,…,FRn)=(μ1,μ2,μ3,…,μn)
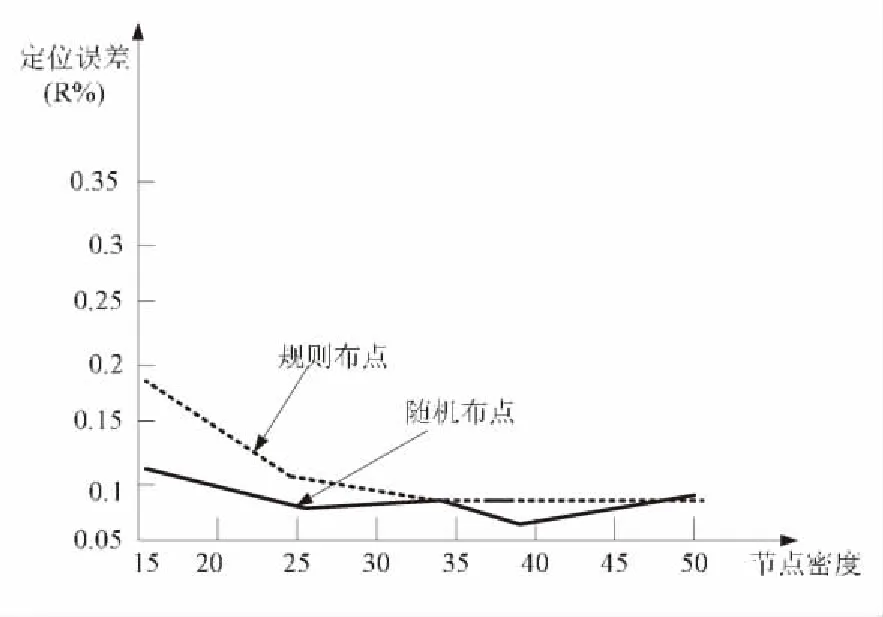
式中μk表示RSSI隸屬于FRk的隸屬度,該組向量的值反映了RSSI在該組隸屬函數映射下具備的模糊化特征.模糊化過程中的n值反映了模糊化的隸屬度.在保證隸屬函數對RSSI覆蓋的前提下,設i 我們在研究問題的過程中,采用自適應的方法確定n的值,并最終得到節點的定位,圖2為確定合適n的定位算法流程,具體算法實現本文不再描述. 圖2 自適應定位算法流程 將所有實驗節點布置在400×400的正方形區域內,確定6個錨節點,按規則布置節點和隨機布置節點兩種方式進行仿真實驗.實驗中,理論通訊半徑取值120,在VS.NET2008下構建模擬平臺OMNET++4.07,選擇Shadowing模型作為我們實驗算法中的信號衰減模型,即 式中Pr(d0)是距離為d0的平均信號強度,β為路徑衰減指數(一般取值為2.5),XdB是均值.圖3是在規則布置節點和隨機布置節點的兩種情況下,模糊自適應定位算法不同節點密度與定位精度的關系. 圖3 模糊自適應定位算法不同節點密度與定位精度的關系 仿真實驗表明,在環境干擾、節點稀疏的環境下,模糊自適應定位算法獲得了相對精確且穩定的定位結果. 對于一個礦井來說,有多個“U”字形的定位區域,但由于它們彼此是獨立的,不同定位區域節點通過射頻信號難以實現互相通信,圖4為淮南顧北煤礦某礦井的平面截圖.選取1312(1)工作面,根據工作條件,在300m×10m的二維區域內,布置800個無線節點,節點布置示意圖如圖5所示,除了信標點固定位置布設之外,其余待測節點隨機分布,測定15%,25%,35%三種信標點分布情況,節點無線通信半徑R設為50m,在測距誤差分別為15%,25%,35%,45%,55%,系統實驗結果如圖6所示. 圖4 淮南顧北煤礦某礦井平面截圖 圖5 無線節點布置示意圖 圖6 礦井下無線定位系統實驗結果 實驗結果表明,基于模糊自適應算法定位的煤礦安全監測定位系統,能夠較為精確地確定定位的目標節點,在信標節點密度提升的情況下,定位誤差較小,滿足生產實踐中的定位要求. 本文提出基于模糊自適應算法定位的煤礦安全監測定位系統的建構方案,提高了以傳統定位算法為基礎的煤礦安全監測定位系統的定位精度和抗干擾能力.方案中通過引入zigbee無線組網技術,大大拓展了監測覆蓋面、無線節點布置的海量性和無規則性,減少了監控死角,嵌入了模糊控制算法提高了定位精度,真正實現了高精準定位,提高了安全生產調度和監管效率.但對于井下移動節點分布不均的情況下,當某一區域的若干移動節點同時向同一信標節點發送信號時,可能會造成通信阻塞或者數據丟失,這將是我們后續研究工作的重點. 參考文獻: [1]謝曉佳,程麗君,王勇.基于Zigbee網絡平臺的井下人員跟蹤定位系統[J].煤炭學報,2007(8):884-888. [2]路坦,王志斌,張記龍.基于Zigbee的煤礦安全監測及人員定位系統[J].煤礦安全,2009(11):77-81. [3]孫繼平,樊京.井下主動超聲定位系統[J].煤炭學報,2009(7):993-996. [4]王福豹,史龍,任豐原.無線傳感器網絡中的自身定位系統和算法[J].軟件學報,2005,16(5):857-968. [5]陳水利,李敬功,王向公,等.模糊集理論及其應用[M].北京:科學出版社,2008.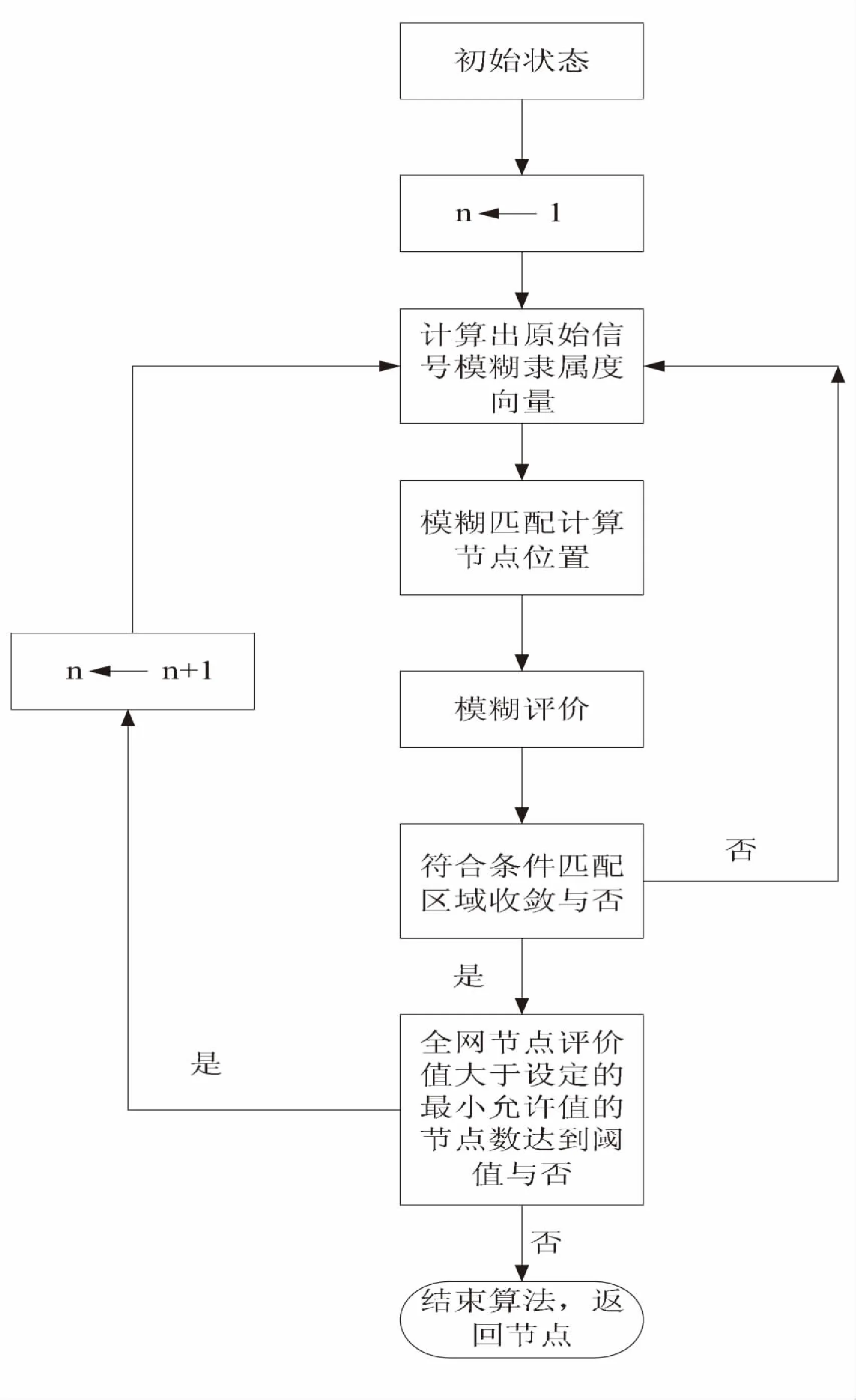
3 模糊自適應定位算法仿真實驗
4 系統實驗


5 結論
猜你喜歡
作文·小學低年級(2025年2期)2025-02-13 00:00:00
小雪花·小學生快樂作文(2024年11期)2024-12-31 00:00:00
作文·小學低年級(2024年2期)2024-04-29 00:00:00
作文·小學低年級(2023年3期)2023-04-29 00:00:00
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
小主人報(2022年4期)2022-08-09 08:52:06
中學生數理化·中考版(2022年11期)2022-02-16 07:01:20
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55