淺析分段PID控制算法在柴油機齒條位置控制中的應用方法
2014-05-28 06:19:10才雨虹
商
2014年42期
才雨虹

摘 要:本文針對柴油發動機的齒條位移進行控制,該控制屬于執行器位置控制,并對該系統的電磁式執行器建立數學模型,建立齒條位移閉環增量式PID控制器,并對其P、I、D值進行整定,最后進行控制系統的仿真實驗。通過仿真發現該控制器對大小階躍響應的輸入,均能改善系統動靜態特性。
關鍵詞:柴油機齒條位移;位置控制;分段PID控制算法
1.引言
柴油車在經濟性、動力性和安全性等方面具有優勢,因此柴油發動機電控系統值得研究。該系統的主要部分是齒條位置控制,所以齒條控制算法的研究很有前景[1]。
2.電磁式執行器建模
柴油機的齒條位置直接受控于控制執行機構,該機構是電磁式的[2]。由力學原理,直接推導得到執行器的運動方程[3]:
以上各參量均與T、KP、TI、TD有關[5]。若T為10毫秒,KP、TI、TD為定值,控制增量與先后三次測量值的偏差有關。柴油機齒條控制輸出的Δu(k)即是齒條位移的增量。
4.分段PID控制器參數整定
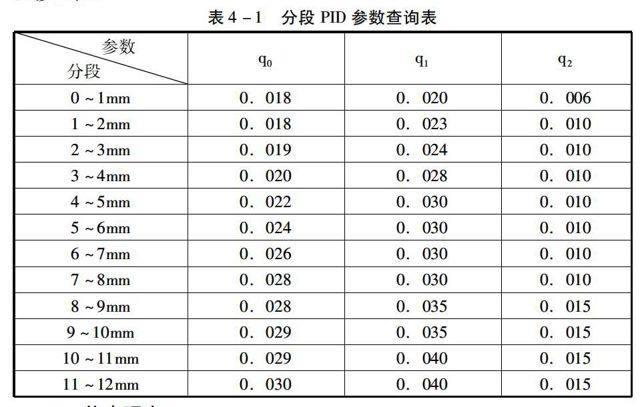
保持柴油機齒條位置系統動態效果好,就要選取合適的PID參數。柴油機齒條的有效位移約為13mm,將13mm均勻分成13段,每段1mm,然后利用不同的PID參數控制不同段。
各段參數采用試湊法整定,對公式(8)進行增量式控制,并對q0、q1、q2試湊整定,確立PID分段查詢表。T為10ms,測得q0、q1、q2后,根據式(9)計算KP、TI、TD值。表4-1為分段PID參數的各段修正值。
5.仿真研究
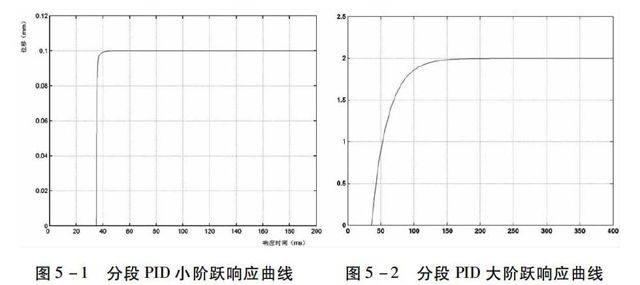
通過分段PID控制,柴油機齒條位移控制效果如下:輸入為小階躍時,響應曲線如圖5-1所示,提高了系統的動態特性;輸入為大階躍時,響應曲線如圖5-2所示,仍提高了系統的動態特性。……
登錄APP查看全文