對基于模糊PID的足球機器人電機控制系統設計研究
2014-05-28 06:19:10董娜娜
商
2014年42期
關鍵詞:仿真
董娜娜
摘 要:針對機器人運動的時變、非線性、干擾大、不確定等特性,本文在傳統PID控制基礎上提出了一種與模糊控制器相結合的混合型模糊PID控制方法。該方法彌補了傳統PID控制所需精確數學模型、參數整定困難等不足,保證了系統的快速性、穩定性和靈活性。
關鍵詞:模糊PID;角度控制;仿真
1.控制系統結構
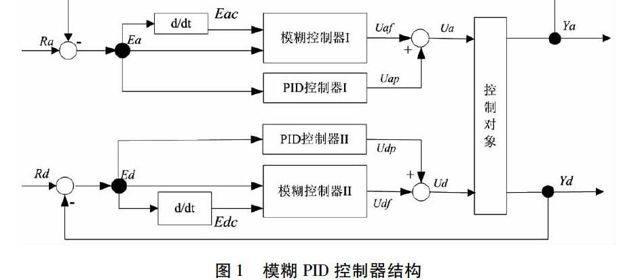
本系統中由于機器人的運動涉及到角度及距離兩個方面,所以本文中的模糊PID控制器具體設計為兩組控制器構成:一組用于控制機器人的角度轉動,一組用于機器人的位置移動。具體結構圖如圖1所示。
其中Ra、Ya為角度的輸入輸出,Ea、Eac為角度誤差及其變化率,Uaf、Uap為角度模糊控制器和PID控制器輸出,Ua為角度控制器總輸出。同理,位置的控制輸出也是如此。下面進一步以電機角度的模糊PID控制為例來說明系統的可行性。
2.模糊控制器的設計
設在采樣時刻t,誤差和誤差的變化分別為:
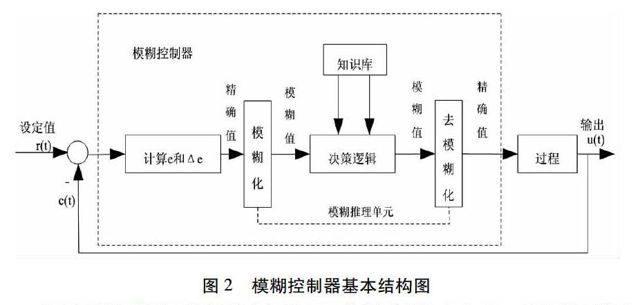
本模糊系統設計為二維控制器:et、Δet為兩個輸入變量,ut為輸出變量。模糊控制器的基本結構如下圖2所示。
從上述控制器的系統設計中知道PID控制器的輸出為Uap,模糊控制器的輸出為Uaf,故總輸出為Ua=Uap+Uaf=KP×et+Ki×∫etdt+Uaf 。
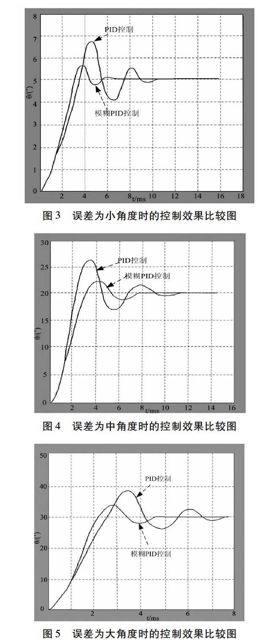
根據模糊控制規律本文設計系統中沒有微分環節,而參數Kp、Ki是通過實驗方法確定的。從角度和距離的實際情況中我們可以看出,不同范圍的誤差變化,系統要取得好的控制效果,Kp、Ki參數是不同的。例如,在角度控制中,Kp適合于誤差為10o到20o的中等角度,但它對5o以下的小角度調節時,Kp×et就會過小,從而使得調節時間較長、穩態誤差增大;……
登錄APP查看全文
猜你喜歡
中國教育技術裝備(2016年20期)2016-12-12 10:09:15
中小企業管理與科技·下旬刊(2016年10期)2016-11-18 20:57:34
科技資訊(2016年18期)2016-11-15 20:09:22
科技資訊(2016年18期)2016-11-15 07:55:28
價值工程(2016年29期)2016-11-14 02:01:16
電子技術與軟件工程(2016年18期)2016-11-14 00:46:54
數字技術與應用(2016年9期)2016-11-09 23:25:33
數字技術與應用(2016年9期)2016-11-09 22:09:07
科技視界(2016年18期)2016-11-03 21:44:44
科技視界(2016年18期)2016-11-03 20:31:49