基于Rao-Blackwellised粒子濾波的巖石聲發射信號去噪
2014-05-09 12:03:52凌同華劉偉宏吳聯迎
交通科學與工程 2014年2期
凌同華,劉偉宏,朱 亮,吳聯迎
在巖石聲發射的信號處理中,信號去噪是最基礎、也是最關鍵的一項工作。目前,信號去噪處理的方法主要有兩種:頻域和時間-空間域分析方法。假設噪聲和期望信號成分在頻域范圍內相互不重疊,可以通過頻域方法濾除噪聲(如:高通濾波、帶通濾波及帶阻濾波等)。例如:白噪聲分布于整個頻域范圍內,傳統的頻域方法已經不能清除噪聲成分。相反,一種基于噪聲統計特性的狀態空間方法被用來去除噪聲成分。在時域上建立起來的常用濾波有:維納濾波、卡爾曼濾波[1-2]及擴展卡爾曼濾波等。維納濾波局限于處理線性平穩靜態過程,并具有很好的效果。卡爾曼濾波常被用于處理非靜態過程的信號。當需要確保濾波精度時,動態系統需滿足線性且噪聲服從高斯白噪聲分布。另外,擴展卡爾曼濾波已被用來處理非線性系統,但對預測狀態的估值問題仍需線性化處理,噪聲要求服從高斯分布。
近幾年,迅速發展起來的粒子濾波[3-5](Particle Filter,簡稱為PF)是一種基于蒙特卡羅的非線性、非高斯系統狀態估計的濾波方法,完全突破了卡爾曼濾波理論框架,對系統的過程噪音和量測噪音不加任何限制。在PF基礎上,作者擬提出Rao-Blackwellised 粒 子 濾 波 (Rao-Blackwellised particle filter,簡稱為RBPF)來加強巖石聲發射信號采集質量。
1 粒子濾波
從動態系統中獲取信息和估計系統的狀態,建立一個精確的模型是至關重要的。大多數物理現象服從隨機分布,其狀態可以用有限維向量描述,并通過向量差分方程來模擬。建立PF系統模型,至少需要兩個方程:①狀態方程,用于描述系統狀態隨時間演變的過程;②觀測方程,用于將系統在某時刻的輸出和系統的狀態聯系起來。

式中:Xk,Yk分別為動態系統在k時刻的狀態向量和觀測向量;f 為狀態函數;h為觀測函數;Wk-1,Uk分別為狀態過程和觀測過程的噪聲。
粒子濾波算法流程如圖1所示,其詳細過程見文獻[3,4]。

圖1 PF算法流程Fig.1 Flow chart of PF algorithm
2 Rao-Blackwellised粒子濾波
2.1 RBPF方法
由于聲發射信號的采集頻率比較高(通常在兆赫茲以上),粒子濾波需要大量的樣本點來組建后驗概率分布,使計算效率下降。尤其在高維狀態空間和實時監控應用中,計算效率下降較明顯。為實現粒子濾波在實時聲發射監控中應用,采取具有降維作用的 RBPF[6-9]。
RBPF將標準狀態空間向量xk分解成兩個子空間,其中一部分x1k可以通過卡爾曼濾波進行分析解計算;而另一部分x2k可通過粒子濾波計算,并使其計算的復雜程度大大降低。RBPF的目的就是用較少的粒子獲取同樣的估計精度,從而降低計算量,實現其成本的節約與推廣應用。基于兩個子空間所構成的條件概率,并對其進行推演:
式中:p(x21:k|y1:k)為x21:k的后驗概率密度函數。
如果p(x11:k|x21:k,y1:k)服從條件線性高斯分布,則可通過卡爾曼濾波實現其最優估計。因此,由兩個子空間構成的后驗概率密度函數通過運用粒子濾波估計時,僅需考慮與x21:k相關的一部分。RBPF可以看成是卡爾曼濾波與粒子濾波的結合體,是一種加強的粒子濾波。
2.2 RBPF實時處理特征
RBPF是一種狀態空間時域的濾波技術,每次輸入一個新的數據算法立即更新。在更新過程中,RBPF不依賴于全部已輸入的信號序列,僅需考慮前一時刻的數據。因此,在采集過程處理信號時,對采集數據長度和采樣頻率沒有特殊要求,此外,RBPF在計算過程所需存儲數據的空間將大大降低,其運算速度獲得較大的提高。斷鉛試驗常被用來模擬聲發射源,斷鉛試驗中采集的聲發射信號如圖2所示。從圖2中可以看出,濾波效果不受采集數據長度的影響。RBPF進行信號去噪處理時不受將來采集數據的干擾,僅與當前時刻及前一時刻所處的狀態有關。傳統的濾波器不具有這一特征,在濾波過程中需要完整的數據鏈。由于RBPF有實時在線處理功能,并能處理高維的非線性非高斯系統,而備受研究者的關注。

圖2 RBPF實時處理信號濾波的特征Fig.2 The real-time processing feature of RBPF based signal filtering
3 RBPF在聲發射信號去噪中應用
3.1 狀態空間模型的建立
由于地震波信號與聲發射信號具有相似性,地震波模型可以成為合適的候選對象來代表結構中的聲發射事件。其模型為:

式中:A1(t-t0)為聲發射源波形的振幅;t0為波形到達時間;ω為主導角頻率(ω=2πf)。
在處理地震數據中,類似的方法被其他學者采用,地震波的振幅可用隨機過程X1(t)表示,同時地震波用隨機過程Xw(t)表示,則該過程可以改寫為:

式中:δ(t)為相位角。
由于高斯-馬爾卡夫(Gauss-Markov)過程能用來模擬許多物理現象,其中也包括模擬地震波的振幅X1(t),其離散形式為:

假定狀態空間的噪聲部分也可用高斯-馬爾卡夫過程代替,其表達式為:

式中:aX2,bX2均為高斯-馬爾卡夫過程的參數;w2與w1相互獨立。
這些方程中涉及的參數可通過聲發射信號的噪聲部分確定。
利用模型式(6),(7),聲發射的狀態空間系統可以構造為:

此外,其量測方程構造為:

式中:ωk為第k時間步長的主頻率;vk為量測噪聲。
式(8),(9)可分別用簡化的矩陣形式表示為:

由于沒有固定的主導角頻率,通過運用頻率粒子集[ωik]Mi=1,會比運用具體指定的頻率有更高的估計精度。在研究中,每一個粒子的動態函數和量測函數分別為:

從式(12),(13)可知,每一個粒子的狀態和量測函數均為線性。從另一個角度來說,本研究提出了用RBPF的方法來估計聲發射信號,即由標準卡爾曼濾波處理狀態更新,同時利用粒子濾波處理非線性的量測函數。
3.2 基于聲發射信號去噪的RBPF算法
完整RBPF算法的步驟為:
1)卡爾曼濾波初始化:X1(0)=0,X2(0)=Y0;誤差協方差在實驗過程中,發現:R選擇相對較大值時,能得到一個較滿意的結果;遞推過程收斂時,R的選取對濾波結果影響甚小。
2)狀態估計預測和誤差協方差預測:
3)粒子更新:
①采樣ωik~p(ωk),zik=sin(ωikkΔ),i=1,2,…,M;
②計算外推量測估計和方差:

式中:Rk為量測函數中觀測噪聲的方差,即vk~(0,Rk)。
③計算預測密度:

④計算每個粒子的重要性權重:


⑥更新量測矩陣:G~k=[1 z~k]。
8)設定k=k+1,回到步驟2)。
針對算法中出現的參數,需要說明:
Φk-1能夠根據狀態函數的先驗知識設定初值,Φk-1可分兩種情況考慮:①時變性,即隨時間需要更新或傳遞;②時不變性。在巖石沖擊聲發射實驗中,由于實驗環境相對較簡單,且RBPF用于聲發射信號去噪目前處于探索性階段,因此僅考慮時不變性,設定,其中:a1,a2均為高斯-馬爾卡夫過程中的參數,詳細的解釋可參考式(6),(7)。a1,a2合適的取值可以從信號的噪聲部分(沒有目標信號參與進行采集)和附有噪聲的信號序列中獲取。
Qk-1為狀態過程噪聲的協方差,其表達式為:

假定噪聲的方差為時不變隨機過程,那么,Qk-1為固定值Q。Q矩陣可通過信號的噪聲部分初始化,確定Q的步驟為:①采集沒有目標信號參與的噪聲信號,即采集周圍噪聲;②計算采集噪聲信號的自相關性;③利用模型σ2e-β|τ|對自相關數據進行擬合,其中:σ,β均通過回歸分析確定。
利用該方法可獲得σX2和βX2。在探討過程中,觀測噪聲的方差假定為相對較小的常數。
3.3 RBPF仿真實驗
為檢驗RBPF的濾波效果,借助于Matlab對其進行仿真模擬。首先需要構造一個不受噪聲污染的原始信號作為標準信號,便于與其加噪處理后進行濾波所得結果比較。為驗證RBPF處理噪聲信號的效果,需對原始信號(如圖3(a)所示)加入高斯密度分布的噪聲,其附加噪聲的方差為0.2,附加噪聲的信號如圖3(b)所示。對加噪信號運用RBPF進行濾波處理,處理后的信號如圖3(c)所示。
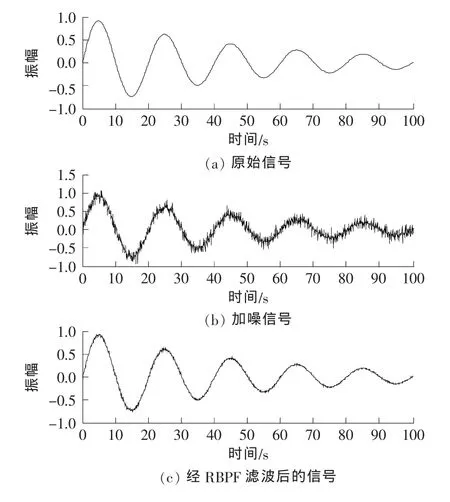
圖3 仿真結果Fig.3 Simulation results

從圖3中可以看出,RBPF在信號去噪處理中能獲得較好的濾波效果。
3.4 RBPF在聲發射信號去噪中應用
試驗數據來源:利用SHPB系統對兩組石灰巖進行沖擊荷載作用下聲發射試驗,具體試驗裝置如圖4所示。采集兩組聲發射數據X11和X21,在采集過程中有噪聲干擾,利用本研究提出的RBPF處理采集的聲發射數據,對應的去噪信號分別為X21和X22,經RBPF后的結果如圖5所示。

圖4 SHPB測試系統Fig.4 SHPB testing systems
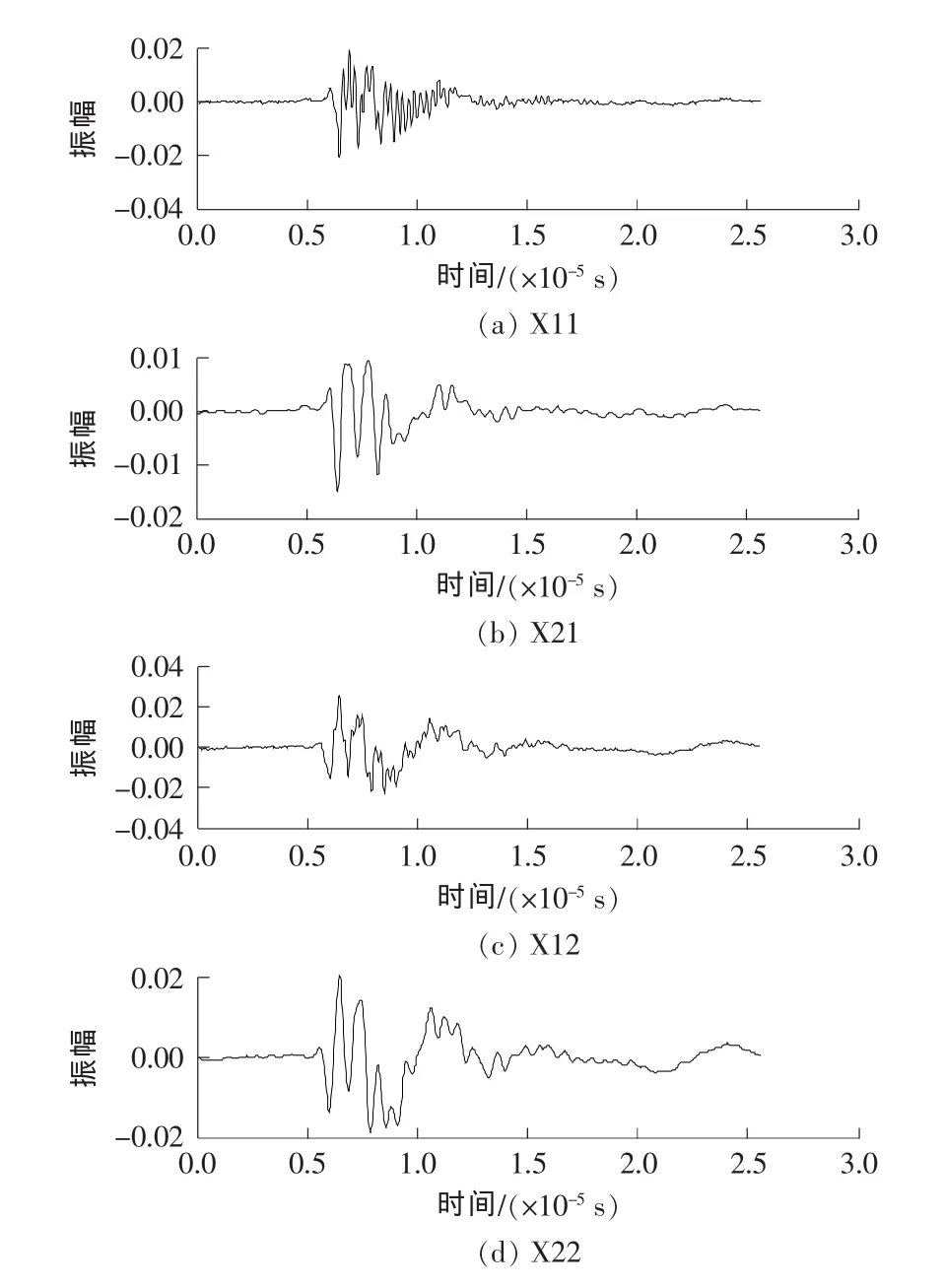
圖5 X11和X21為原始信號,X12和X22為其對應的去噪信號Fig.5 X11and X21as original signals,X12and X22as corresponding denoising signals
在處理兩組聲發射數據時,粒子總數取200,噪聲按高斯-馬爾卡夫過程模擬,計算時間常數Tc=4.5×10-4ms,方差σ=6.7×10-3v2。聲發射源的采樣頻率40MHz,并遵循假設:開始波形的振幅為零,X1(1)=0;第一個測量值y1設定為噪聲,即X2(1)=y1。
為進一步分析聲發射數據并檢驗RBPF的效果,利用FFT求出圖5中各信號的頻譜圖,如圖6所示。從圖6中可以看出,X11最大振幅所對應的頻率分別為0.15,1和3MHz,而X21最大振幅所對應的頻率分別為0.15和1MHz。X21在0.15和1MHz對應的幅值分別高于X11所對應的點,而在3MHz時,兩者相差不大,甚至低于X11的,在3MHz出現的現象由噪聲所致。通過RBPF對原始信號進行去噪,發現兩者在3MHz的幅值都趨于零。可見,RBPF在處理聲發射信號中具有很大的潛力。

圖6 圖5中對應信號的頻譜Fig.6 Spectrogram of the corresponding signal in Fig.5
4 結論
本研究提出了一種時空濾波方法RBPF,并對聲發射信號進行去噪處理。通過合理選擇模型參數,由實驗結果驗證了RBPF能夠加強聲發射信號的信噪比,并保留其主要頻率成分。實驗中還發現,沖擊荷載作用下石灰巖最大振幅所對應的頻率為0.15和1MHz,這對爆破與機械震動作用下的聲發射監控有著重要的參考價值。
值得注意的是:論文研究模型最初來源于其他學者用來處理地震數據。由于考慮到聲發射與地震波具有一些共通性,通過修正其模型參數,延伸到RBPF處理聲發射信號中,并取得了不錯的效果。然而,對聲發射信號最優模型的建立和過程,噪聲特征仍需作進一步的研究。
(
):
[1] Niri E D,Farhidzadeh A,Salamone S.Nonlinear Kalman filtering for acoustic emission source localization in anisotropic panels[J].Ultrasonics,2014,54:486-501.
[2] Baziw E,Jones I W.Application of Kalman filtering techniques for microseismic event detection[J].Pure and Applied Geophysic,2002,159:449-471.
[3] Zhang W M,Du G,Zhong S,et al.Study of nonlinear filter methods:Particle filter[J].Journal of Systems Engineering and Electronics,2006,17(1):1-5.
[4] Petar M D,Jayesh H K,Zhang J Q,et al.Particle filtering[J].IEEE Signal Processing Magazine,2003,20(5):19-38.
[5] Zhou C J,Zhang Y F.Particle filter based noise removal method for acoustic emission signals[J].Mechanical Systems and Signal Processing,2012,28:63-77.
[6] Menéndez R M,Freitas N,Poole D.Dynamic modelling and control of industrial processes with particle filtering algorithms[J].Computer Aided Chemical Engineering,2004,18:721-726.
[7] Freitas N.Rao-blackwellised particle filtering for fault diagnosis[J].IEEE Aerospace Conference Proceedings,2002,4:1767-1772.
[8] Mustière F,Bolic'M,Bouchard M.Rao-Blackwellised particle filters:Examples of application[A].IEEE CCECE/CCGEI[C].Ottawa,Canada:[s.n.],2006:1196-1200.
[9] 潘宏俠,門吉芳.粒子濾波在軸承故障振動信號降噪中的應用[J].振動、測試與診斷,2011,31(3):354-356.(Pan Hong-xia,Men Ji-fang.Bearing fault vibration signal noise reduction based on particle filtering[J].Journal of Vibration,Measurement & Diagnosis,2011,31(3):354-356.(in Chinese))
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
鴨綠江(2021年35期)2021-04-19 12:24:18
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
數學物理學報(2020年2期)2020-06-02 11:29:24
電子制作(2018年11期)2018-08-04 03:25:42
北京航空航天大學學報(2017年9期)2017-12-18 07:12:25
光學精密工程(2016年6期)2016-11-07 09:07:19
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
電源技術(2016年9期)2016-02-27 09:05:39
