基于LOB的輻射源無源定位算法對比研究
2014-03-11 14:01:14徐萬里
裝甲兵工程學院學報 2014年4期
關鍵詞:融合
徐萬里,劉 準
(裝甲兵工程學院信息工程系,北京100072)
利用無源傳感器測量并實現輻射源的定位是軍事和民用領域的一個常見問題,現代信息化戰爭的焦點是信息的獲取和處理,處理的基本問題是對目標進行定位和識別。在定位裝備實際測量過程中,得到的原始數據總會伴有噪聲和誤差,采用哪種定位算法來處理測得的數據,能更好地減小噪聲和測量誤差對目標位置估計值的影響,成為研究此類定位問題的重點[1]。
現代定位技術的主要算法有三角定位法、二次定位法和單站定位法等,而其核心技術是基于輻射源方位線(Lines Of Bearing,LOB)或到達時差(Time Difference Of Arrival,TDOA)。基于 LOB的定位算法主要有 Pages-Zamora定位算法[2]、布朗定位算法[2]、概率定位算法[3]、模糊定位算法[4]。本文首先分析了以上4種算法的原理,計算了運算量;然后提出了一種基于LOB的融合-迭代定位算法,并與以上4種算法進行了蒙特卡羅仿真對比實驗,比較了5種算法的定位性能。
1 基于LOB的三角定位原理
為了便于比較基于LOB的輻射源定位的諸多算法的性能,同時不失一般性,可考慮如圖1所示的情況[5-6]。
圖1 中有N 個測向觀站點 (xi,yi),i=1,2,…,N,N個測向角度φi和1個輻射源目標點(xT,yT)。在沒有噪聲和測量誤差的理想情況下,通過多組測向數據所求得的輻射源目標坐標會重合為一點。然而在實際測量中,測得的方位線總會受到噪聲和測量誤差的影響,其對位置估計結果的影響體現在多條方位線不交于一點。因此,采用三角定位原理的定位算法需要解決的問題就是:利用多條方位線及其產生的多個交點,計算出目標點的最佳估計值。
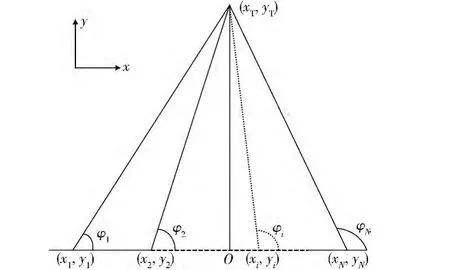
圖1 三角定位原理
2 Pages-Zamora定位算法
Pages-Zamora定位算法是基于向量關系的定位方法,其幾何原理如圖2所示。
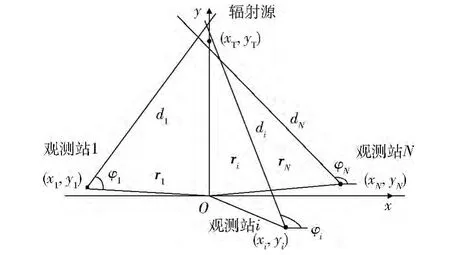
圖2 Pages-Zamora定位算法原理
根據圖2中的向量關系有

式中:di為觀測站i與被測目標之間的距離;vi為單位方向向量,可表示為 vi=(cosφi,sinφi)T。
采用如下方法將距離di從式(1)中消去:

由式(2)可得

將式(3)兩式相減得

對所有的站點信息進行上述處理,可得如下矩陣形式的方程組:
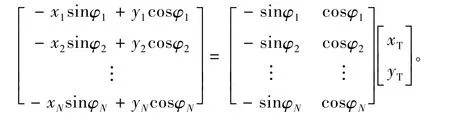
或記為如下形式:

式(4)的最小二乘解為

利用N個觀測站對輻射源目標進行測向時,完成1次Pages-Zamora定位算法的運算,需進行(16N+8)次乘/除法和(11N+4)次加/減法。
3 布朗最小二乘定位算法
布朗定位算法是基于偏離距離的定位方法,其基本思想是使所求得的目標位置估計值到各條方位線距離的平方和最小化[7]。圖3為布朗最小二乘定位算法原理。
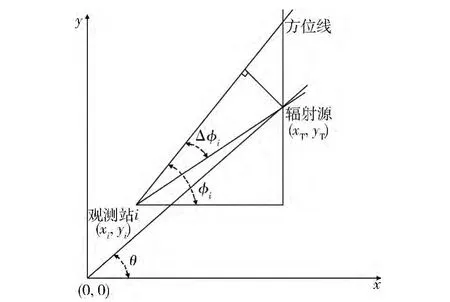
圖3 布朗最小二乘定位算法原理
根據圖3可得總偏離距離的平方和為
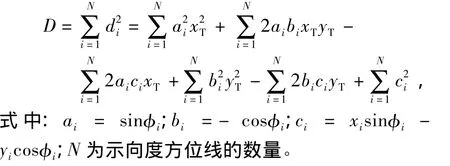
令D關于xT和yT的一階偏導數為0,即得到使總偏離距離平方和最小化的xT和yT:
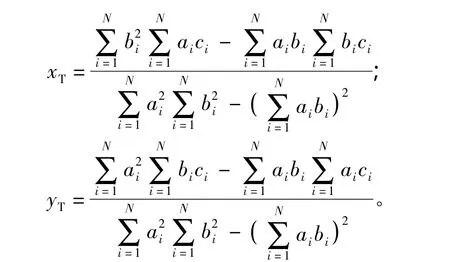
圖3中觀測站i的偏離距離可表示為

表示為矩陣的形式:


目標方向向量XT的最小二乘估計為

利用N個測向觀測站對定位目標進行測向時,每完成1次布朗定位算法,需進行(11N+10)次乘/除法和(6N+4)次加/減法。
4 概率定位算法
觀測站測量結果中的誤差是由多種因素的綜合作用形成的,依據統計的觀點,可以認為該誤差服從正態分布[3]。設測量結果為W,W0為任意一個具體的測量結果,則可以用概率密度函數來描述二者的關系,即

然后,需要將上述非線性問題線性化。設測量W對應一個子集,該子集的坐標點與測量值之間的關系如下[8-9]:

將式(6)在(x0,y0)處進行泰勒級數展開,保留一階項,舍棄高階項,可得[9]

于是,式(5)可化為

式中:

F(x,y)是一個二次多項式,可將其記為如下標準形式[9]:

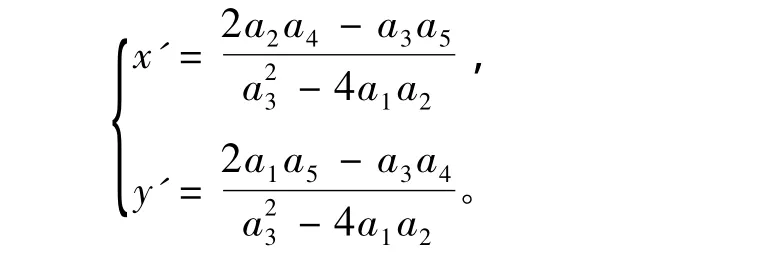
在這個問題中,求解定位點估計值的過程就是求解概率密度最大的過程[8]。由于所有單個測量的概率密度函數都是指數函數,因此他們相乘得到的多個測量的總概率密度函數也是一個指數函數,其指數是單個概率密度函數的指數之和[8-9]。那么,它們的和F(x,y)也將是關于x,y的二次多項式,可以繼續使用式(7)來表示。將式(7)分別對x,y求偏導,令偏導數為0,可以得到求解目標點估計值的方程組:

由式(8)可求出目標點估計值的解為
利用N個測向觀測站對輻射源目標進行測向時,完成1次概率定位算法的運算,需進行(30N+13)次乘/除法和(17N+6)次加/減法。
5 模糊定位算法
從N個觀測站中任取2個觀測站點,分別記為(xi,yi)和 (xj,yj),i,j=1,2,…,N ,由這 2 個觀測站測得的數據可求得交點坐標(xij,yij):
將測向信息兩兩組合,可計算得到C2N個交點,這些交點較為集中地分布在目標點周圍,模糊定位算法利用各交點的相關程度來估計目標點的坐標[10]。與概率定位算法相似,可以認為測量誤差服從正態分布。
數定義為
式中:sx、sy分別為C2N個交點的x、y坐標基于樣本均值計算出的標準差;r為C2N個交點的x、y坐標基于sx、sy的相關系數。
定義各點對本身的隸屬度wmm=1,交點,)與交點,)的相關程度越大,則其隸屬度wmn越大。對于任意一個交點(),都有個隸屬度 wmn,m,n=1,2,…,由此可得到一個×的模糊矩陣:
式中:an為交點(xTn,yTn)對各交點的隸屬度之和。an越大,其對各交點的總體相關程度越高,因此,使an取得最大值的交點的坐標可被視為目標點的估計值。
利用N個觀測站對目標點進行測向時,每完成1次模糊定位算法的運算,需進行(11N4-22N3+41N2-30N+40)/8次乘/除法和(2N4-4N3+19N2-17N-12)/2次加/減法。當N較大時,可以采用11N4/8次乘/除法來衡量模糊定位算法的計算量。

6 融合-迭代算法
依據數據融合的思想,本文提出一種基于交點坐標融合的目標點估計方法,稱為融合-迭代定位算法。其基本思想是:依據LOB得到的一組交點,根據各交點到估計值的距離賦予相應的權重值,距離估計值越近,權重越大,反之則越小;然后將交點進行加權融合并迭代運算,逐步逼近目標值。
設(x0,y0)為目標的初始估計值,通過三角定位原理計算所有觀測站觀測輻射源的LOB兩兩相交的交點 (xij,yij),i,j=1,2,…,N ,且 i < j。
計算每個交點 (xij,yij)與目標估計值(x0,y0)的距離:
根據dij來確立每個(xij,yij)所對應的權重值:

計算加權融合后的估計值(xf,yf):
其中 i< j,經迭代逐步逼近 (xT,yT)。
利用N個測向觀測站對定位目標點進行測向時,每完成1次融合-迭代定位算法,需進行(N4-2N3+29N2-28N)/4次乘/除法和(N4-2N3+29N2-28N-8)/4次加/減法。
7 仿真實驗
實驗中輻射源(xT,yT)位置設定和觀測站的布站位置按照圖1給定。輻射源位于y軸上,11個觀測站等距地分布在x軸上。采用蒙特卡羅[11]仿真實驗產生100組隨機測向角度,用數據的均值和圓概率誤差(Circular Error Probability,CEP)對各種算法的性能進行比較。
設定位估計的協方差矩陣為
如果誤差服從正態分布,那么誤差區域是一個橢圓,稱為概率誤差橢圓(Elliptical Error Probability,EEP),其半長軸a和半短軸b的計算公式分別為

式中:C=-2ln(1-Pe),其中Pe為目標位于該誤差橢圓中的置信度[7]。
半長軸a相對于x軸的傾角θ為
用R表示CEP,則

采用這種方法求得的圓半徑誤差在10%以內[12]。
設輻射源位置固定不變,坐標為(0,100),在x軸的區間[-50,50]中,等距離布置上11個觀測站,對目標進行測量,假設觀測站測向角度誤差為2°。(σx,σy)為定位結果(xT,yT)的標準差,誤差為定位結果相對于輻射源坐標(0,100)的距離。定位數據記錄如表1所示。

表1 仿真定位結果
由表1可知:Pages-Zamora定位算法與布朗定位算法估計結果完全一致,同屬最小二乘級精度,但布朗定位算法的運算量更小;概率定位算法的精度較低,這是因為它采用線性截斷,直接丟棄了非線性項,其計算量與Pages-Zamora定位算法相近;基于隸屬度函數的模糊定位算法沒有引入截斷誤差,其定位誤差小于以上3種算法,但是該算法高度依賴于測向角度的精度,穩定度差導致CEP增大,而且該算法計算量較大;融合-迭代定位算法的精度最高,這是由于它重用均值附近的測量點,而最小二乘法強調的是總體誤差最小,同時該算法計算量的增大在可接受范圍之內。
8 結論
本文分析了Pages-Zamora定位算法、布朗定位算法、概率定位算法、模糊定位算法的原理,并計算出其運算量,在此基礎上提出了基于LOB的融合-迭代定位算法,然后對這5種算法進行了蒙特卡羅仿真對比實驗,比較了其定位性能。實驗結果表明:融合-迭代算法最能反映數據自身的分布規律,是可取的高性能無源定位算法。
[1] 孫仲康,郭福成,馮道旺.單站無源定位跟蹤技術[M].北京:國防工業出版社,2008:12-14.
[2] Poisel R A.電子戰目標定位方法[M].北京:電子工業出版社,2008:26-94.
[3] 胡來招.無源定位[M].北京:國防工業出版社,2004:41-48.
[4] 徐萬里,聶輝宇.輻射源信號模糊定位算法[J].四川兵工學報,2011,32(6):57-59.
[5] Dogancay K.Bearings-only Target Localization Using Total Least Squares[J].Signal Processing,2005(85):1695-1710.
[6] Dogancay K.On the Bias of Linear Least Squares Algorithms for Passive Target Localization[J].Signal Processing,2004(84):475-486.
[7] Poisel R A.Introduction to Communication Electronic Warfare Systems[M].Norwood,MA:Artech House,2002:384-388.
[8] 徐志剛,田增山,田世君.基于概率的無源定位算法[J].信息技術,2005(12):74-77.
[9] 佘青松.無源探測定位技術研究[D].成都:電子科技大學,2007.
[10] 楊綸標,高英儀.模糊數學原理及應用[M].廣州:華南理工大學出版社,2005:7-11.
[11] 賀驍,劉蕓江,劉梅.一種蒙特卡羅方法的改進方案[J].中國科技論文,2014(1):71-75.
[12] Foy W H.Position-location Solutions by Taylor-series Estimation[J].IEEE Transactions on Aerospace and Electronic Systems,1976,AES-12(2):187-194.
猜你喜歡
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
數學年刊A輯(中文版)(2022年4期)2022-02-16 08:17:34
今日農業(2021年19期)2022-01-12 06:16:36
中老年保健(2021年11期)2021-08-22 03:15:44
無線電通信技術(2021年4期)2021-07-13 08:58:28
無線電通信技術(2021年3期)2021-06-08 03:33:48
中學生數理化(高中版.高考數學)(2021年1期)2021-03-19 08:28:38
無線電工程(2020年11期)2020-10-29 01:25:46
現代出版(2020年3期)2020-06-20 07:10:34
福利中國(2015年4期)2015-01-03 08:03:38
