飛機電磁彈射系統發展及其關鍵技術
2014-03-11 14:00:48李小民李會來向紅軍李治源
裝甲兵工程學院學報 2014年4期
李小民,李會來,向紅軍,李治源
(1.軍械工程學院無人機工程系,河北石家莊050003;2.軍械工程學院彈藥工程系,河北石家莊050003)
利用電磁力實現飛機推進與制動的新型彈射裝置具有小體積、高效率、高可靠性、低維護成本、寬使用范圍等諸多優勢,能高精度、全程可控地彈射從小型無人機到戰斗機的大部分機種[1-2]。直線電機作為電磁彈射器的執行機構,其主要應用范圍是大載荷的短程加速,在軍事上比較典型的應用是在航空母艦上艦載飛機的起飛彈射。設計和研發高性能的彈射用直線電機已成為國內外學者和機構對電磁彈射器研究工作的熱點。本文對飛機電磁彈射系統(ElectroMagnetic Aircraft Launch System,EMALS)的發展現狀、研究內容和電磁彈射用直線電機的關鍵技術進行了研究,并對其發展前景和應用進行了展望。
1 飛機電磁彈射系統發展現狀
1.1 美國飛機電磁彈射系統研究現狀
從20世紀40年代起,世界軍事發達國家已認識到電磁彈射技術的優勢和發展潛力,投入了大量的人力、物力和財力進行飛行器電磁彈射技術的研究工作,并在各自的技術側重點上取得了明顯實效。其中,美國對艦載機電磁彈射技術的研究最早,也最為成熟,其主要側重于大載荷的艦載機電磁彈射器工程化研制。由于受限于大功率脈沖電源技術,英法等國家的研究側重于相對小載荷的無人機電磁彈射器,當前技術瓶頸也集中在大功率的高頻開關脈沖功率技術和補償式脈沖交流發電機技術上。
美國海軍于20世紀40年代首先提出了將電磁彈射技術應用于飛機起飛,當時美國威斯汀豪斯電氣公司曾用一個稱作電拖(Electopult)的裝置做全尺寸飛機的彈射試驗。然而,由于該系統運行成本較高,且與當時主流的液壓彈射器相比存在較大差距,因此二戰結束后美軍就放棄了對該系統的研究工作。1981年,美軍重新開始對EMALS進行可行性研究,論證其是否能在航空母艦上進行電磁彈射飛機起飛。1988年,美國海軍EMALS研究小組(卡曼電磁系統公司)制造了12英尺的小比例電磁彈射系統演示器并進行了測試試驗,其靜態推力可達到500 kN以上,電磁輻射也能夠被屏蔽在彈射用直線電機的槽型結構內。而后,美國海軍空戰中心確定了航空母艦艦載機電磁彈射器模型的主要指標:在3 s內,將重達36 t的全載F-14戰機加速到150節[3-4]。1995年,美國海軍空戰中心的 M.R.Doyle等人[5]提出了一種EMALS設計方案,如圖1所示。該方案采用無槽型直線永磁同步電機、圓盤式交流發電機和頻率變換器共同構成彈射系統。

圖1 美海軍空戰中心EMALS設計方案
20世紀90年代后期,美國在論證未來航空母艦的過程中,正式將EMALS擺上了議事日程,并于1999年完成概念探討和定義工作后,通過招標確定由諾斯羅普·格魯曼公司(Northrop Grumman Gorp,NGG)和通用原子公司(General Atomics,GA)分別開展計劃定義和風險降低階段的研究,旨在開發一個全尺寸、全集成的 EMALS原型樣機[4,6-7]。2004年,完成了2種EMALS方案試驗驗證后,美國海軍空戰中心選擇了GA的設計方案進入工程制造研制階段,其EMALS設計方案如圖2所示。
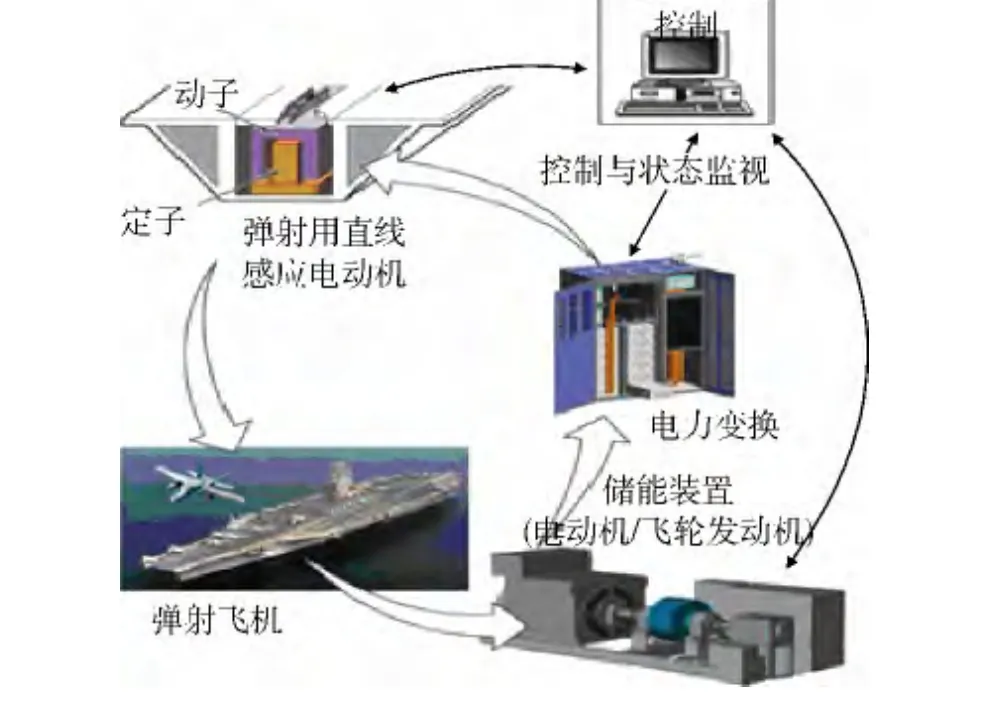
圖2 GA的EMALS設計方案
2008年4月,GA公司EMALS研究團隊成功通過了儲能60 MJ、功率60 MW的電動機/飛輪發電機的工廠驗收測試,這標志著EMALS最后一個技術障礙被掃清[6-7]。2009年7月,GA-EMS公司完成了EMALS發電和動力設備裝置的高頻循環測試(HCT-Ⅱ);而后,開始進行EMALS模擬彈射試驗和全功率演示驗證試驗工作。圖3是GA研制的EMALS關鍵的儲能部件——慣性儲能發電機[7]。
圖3 GA研制的慣性儲能發電機
從2010年1月起,EMALS的研究工作正式進入到全尺寸試彈射綜合試驗階段。試驗初期,由于軟件問題,曾致使直線電機電樞和甲板張緊器造成不可修復的損傷。但是,問題很快得到了解決,2010年3月重新開始試驗,經過多次彈射后的試驗小車末速可達180節,達到了EMALS對彈射末速的最高要求[7-8]。2010年12月,EMALS首次成功地將F/A-18E“大黃蜂”戰斗攻擊機彈射起飛,研究工作獲得了里程碑意義;隨后,EMALS又多次完成了對T-45C“蒼鷹”教練機、C-2A“灰狗”運輸機等其他機型的彈射起飛。2011年9月,美軍新澤西州海軍基地一架E-2D“鷹眼”預警機首次從全尺寸模型航母甲板上設置的電磁彈射器上彈射起飛,此次試驗標志著電磁彈射器應用于航母已完全進入工程化改進調試階段。到目前為止,美國在EMALS上花費了30余年的時間和40億美元的經費,預計其將在2015年服役的CVN-78航母上正式使用。從全尺寸彈射綜合試驗的效果和改進調試的進度來看,工程研制和計劃進度表很吻合,按時間表成功投入使用的可能性非常大。
1.2 英法電磁彈射系統研究現狀
英國飛機電磁彈射系統簡稱為EMCAT(ElectroMagnetic CATapult),其計劃作為英海軍新一代航母(CVF-1,CVF-2)的電磁彈射器。2001年,英國便已啟動了“電磁動力綜合集成技術”(ElectroMagnetic Kinetic Integration Technology,EMKIT)的研發計劃;2005年,開始進行樣機研制;2006年12月,在萊斯特謝爾郡的試驗場完成了EMKIT系統首次試運行;2007年2月,EMKIT成功進行了在特定彈射速度下的試驗,7月開始進行滿負載試驗。EMKIT樣機是一種低電壓系統,采用直線感應電機,安裝在沿著15 m長的軌道布置的模塊化設備中,軌道與靜態轉換開關相連,如圖4所示。EMKIT系統計劃用于從海上平臺上彈射無人機,要求實現的技術指標為:彈射飛機質量小于500 kg;彈射末速度約為50 m/s;每小時可完成5次彈射;最大加速度為10g。

圖4 英國研制的EMKIT試驗樣機
英國科孚德公司的EMCAT系統在技術和性能上接近于美國GA公司的EMALS。但EMCAT系統采用了開路控制方式,可消除對速度反饋傳感器的依賴,不需要在軌道上安裝傳感器;另外,它還能針對大多數故障自行調整和修正,在單個直線感應電動機失靈、飛機噴氣動力不足、飛機質量設置錯誤以及缺少飛機噴氣推力數值時能夠正常彈射。由于避免了大量傳感器的使用和安裝工作,EMCAT系統在成本和保養方面更具優勢,系統的可用性更好,控制更簡單。與EMKIT系統使用690 V的低電壓不同,EMCAT系統工作在3 kV的高電壓環境下,尺寸也遠大于EMKIT系統。EMCAT系統彈射有人駕駛飛機時的加速度為3.5g,彈射能量將達到60~80 MJ,最高可將30 t的飛機加速至78 m/s。
法-德圣路易斯研究所(Institute of Saint Louis,ISL)曾提出了一種能彈射數百千克無人機的電磁彈射器設計方案[9]。它采用了長初級結構的永磁同步直線電機,集中整距三相定子繞組。其技術指標為:彈射無人機質量350 kg;彈射末速度50 m/s;導軌長度14 m;發射仰角30°;平均加速度89.3 m/s2;推力 33.015 kN。
2 電磁彈射用直線電機關鍵技術研究現狀
在大載荷、低初速的飛機電磁彈射情況下,必然要求彈射器的本體(即直線電機)具有很高的效率和推力/體積比,這樣才能滿足彈射器的性能指標。電磁彈射器不僅要求直線電機的輸出推力足夠大,還要求推力波動盡可能小,以防止對飛機及機載設備產生沖擊和過應力。直線電機作為電磁彈射器的執行機構,其推力性能提升和推力波動抑制是重要研究內容,其關鍵技術就在于電機本體的優化設計和高性能的控制方法。
2.1 直線電機選型方案
電磁彈射器的直線電機選型主要有永磁直線電機(Permanent Magnet Linear Motor,PMLM)、直線感應電機(Linear Induction Motor,LIM)和直線磁阻電機(Linear Reluctance Motor,LRM)3類。對于LIM,由于其采用注入電流勵磁,使得繞組能夠加載大電流,故LIM的推力輸出往往大于永磁類直線電機,其通常適用于大載荷艦載機電磁彈射器設計中;與感應類電機相比,PMLM的能量轉換效率相對較高,更適用于質量較小的無人機電磁彈射器方案設計,其工作原理如圖5所示。根據PMLM的初級、次級結構類型的不同,其又分為動磁型和動圈型2種結構,通常動圈型直線電機易受拖線結構的限制,動磁型直線電機往往更適于大推力、高速度的電磁彈射應用[10]。
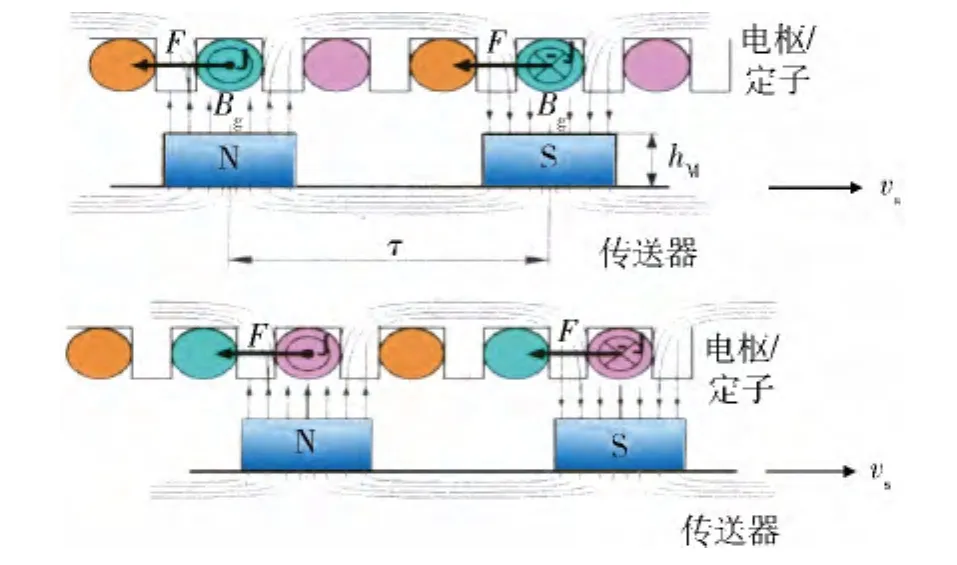
圖5 PMLM工作原理
對于基于LRM的電磁彈射器設計方案,其控制方法較為簡單,但是消除較大的齒槽定位力和磁飽和問題是限制其動子末速度輸出的主要因素[11]。基于齒槽結構的永磁直線電機的電磁彈射器方案,為消除永磁體磁飽和限制并防止繞組大電流造成永磁體退磁,有限元計算結果顯示使用永磁體厚度要達到100 mm,這就限制了其工程化設計應用[9]。考慮到直線電機的恒推力輸出控制問題,采用不均勻分段法設計的電機應用于電磁彈射器,使得從設計階段就考慮了推力波動的抑制問題[12]。但這種結構設計方案會在分段過渡接縫時產生定位力的波動,需要進一步消除。
2.2 直線電機電磁-推力性能優化方法
2.2.1 彈射用直線電機電磁-動態性能分析
直線電機電磁性能的研究主要借助于有限元分析,通過對直線電機彈射過程的動態模擬來研究電磁場分布、電磁-溫度參數等對推力輸出和動子加速性能的影響。通過仿真計算,為彈射器的工程設計提供相應的基礎數據和理論依據。
寇寶泉等[13]研究了一種電磁彈射用永磁直線同步電機(Permanent Magnet Linear Synchronous Motor,PMLSM)的瞬態電磁-溫度場特性,并對直線電機的電磁-動態性能特性計算結果在樣機上進行了試驗驗證,仿真模型和電磁場分布云圖如圖6所示。
羅宏浩等[14]對一種電磁彈射用PMLM在不同電流驅動模式下的動態發射特性進行了研究,并結合理論分析與有限元仿真對電機參數進行了優化設計,其有限元動態運行特性結果令人滿意。筆者對一種適用于幾十千克小載荷無人機的動磁型LPMBLDCM電磁彈射器的電磁-推力特性進行了研究,仿真模型和電磁場分布云圖如圖7所示,利用有限元計算得到了電磁特性、電路特性和加速特性的仿真結果,仿真數據和樣機測量數據相對一致。
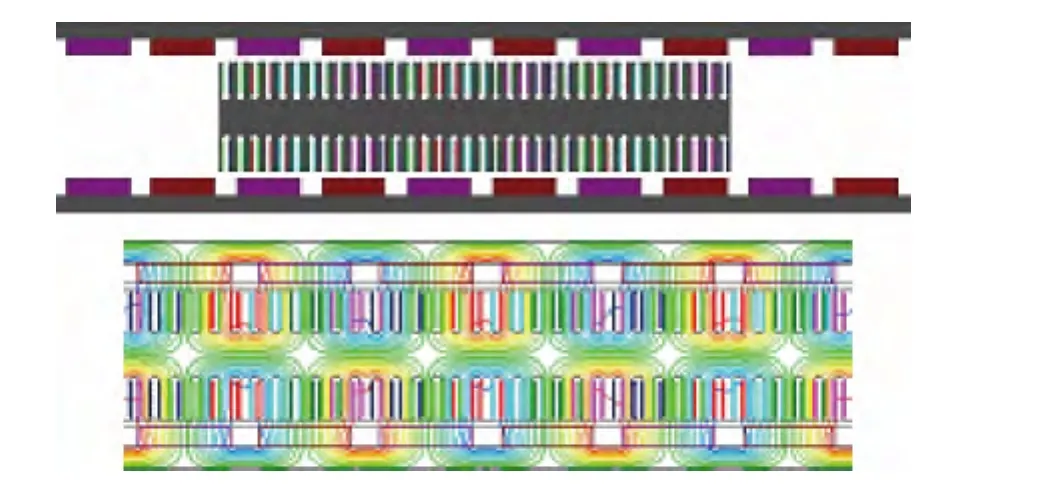
圖6 PMLSM的仿真模型和電磁場分布云圖
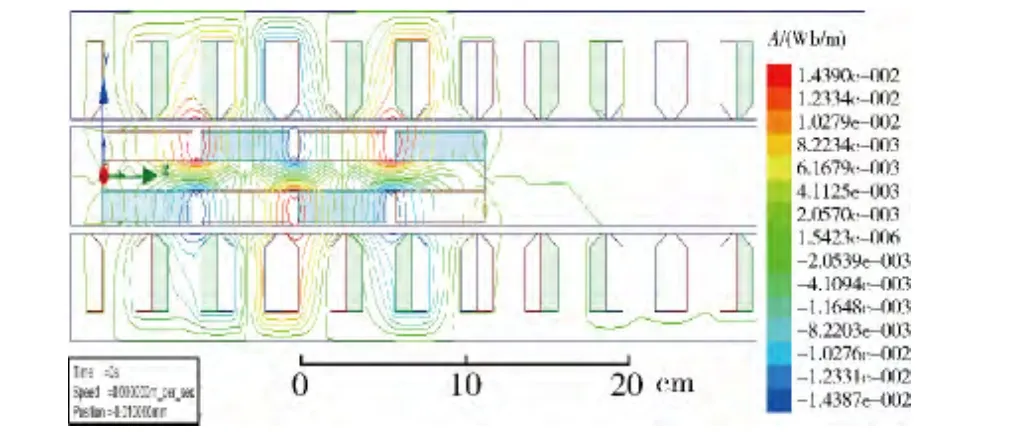
圖7 LPMBLDCM的仿真模型和電磁場分布云圖
2.2.2 直線電機推力性能提升方法
直線電機推力性能提升方法包括推力輸出性能提升和恒推力輸出控制2方面。總體上可分為2類:1)通過優化設計電機結構來抑制齒槽力和優化反電動勢波形,進而達到提升推力輸出和抑制推力波動的目的;2)設計適當的控制策略,對電機輸出的不良特性加以改進,使得電機輸出推力更加平穩。
1)直線電機結構優化設計
在電機結構優化設計方面,相關研究內容主要集中在對電機內部電磁場進行分析和計算,研究推力輸出下降和推力波動的原因,并據此優化調整電機的最佳結構參數,在提高電機輸出推力的同時盡可能減少其推力波動。電機結構優化主要是通過對斜槽、繞組結構、磁極、鐵心等方面進行設計,來優化電機輸出性能[15-18]。另外,通過特殊的結構安排和機械設計仍可以達到減小電機齒槽力和推力波動的目的[19]。值得注意的是,通過優化結構參數提升電機輸出性能時,會引起因某些參數的改變而影響電機其他性能的問題,所以必須全面考慮。其他非目標優化參數不能隨意調整,改變其他參數后必須重新計算,因而單一目標參數優化設計使用范圍有限,進而引出了電機的多目標優化設計問題[20]。
另外,在高速情況下,永磁電機會產生很高的渦流損耗和磁滯損耗,進而造成電機推力/轉矩輸出的下降[19,21-22]。電機高速工況下對電機性能帶來的影響主要體現在渦流阻力和磁場檢測2方面。相關研究[21]指出:高速時的損耗模型不能通過傳統的解析估算,而必須通過數值計算才能得到正確的結論。在電機高速工況下,由于動磁體高速運動引起的反電勢磁場和渦流磁場會干擾電機磁場的檢測,從而導致基于磁場檢測的電機換相控制問題也被眾多學者[23-24]廣泛研究。在電機設計中,可以在材料選擇、鐵耗計算、磁路結構等方面采取適當措施,以提升推力輸出性能,還應將電磁場、熱場和機械結構進行綜合分析,并且考慮電機高速工況下電感參數對控制系統的影響,最后得出合理的設計方案。
2)直線電機推力控制方法
直線電機推力控制方法的實質是通過對電機推力特性的研究(實時或者離線),制定相應的控制策略,并根據電壓、電流、位置、速度等觀測量的變化給出控制量,使電機的輸出達到預期目標。它主要包括預定義電流波形控制、狀態觀測與估計、直接推力/轉矩控制、制動性能分析以及變速度條件下的換相推力波動抑制等研究內容。
直線電機推力波動主要來源于3個方面:靜態的齒槽定位力、電樞反電動勢不規則引起的推力波動和換相控制引起的推力波動[25]。前2種推力波動主要是由電機本身的結構特點和電磁感應所引起的,其主要通過電機結構的優化設計來抑制;對于換相推力波動抑制,一般是通過適當的激勵控制策略使得電機輸出推力更為平穩。換相推力波動抑制方法是無刷直流電機特有的控制方式引入的,它包括2方面:一是換相時刻非換相電流變化引起的推力波動;二是在電機高速運行工況下,換相控制本身導致電流波形滯后反電勢波形所引起的推力下降[23]。電流波形控制方法是通過對電樞反電動勢不規則問題的補償來抑制電機推力/轉矩波動的。通過對換相電流預測控制或注入電流諧波成分,來得到滿足恒推力要求和約束條件的電流波形統一形式,在反電勢非理想波形的條件下實現恒推力控制,這是電流波形控制方法的理論依據。
為了改善推力波動,許多學者[24,26-27]嘗試通過建立輸入參數與輸出推力/轉矩的直接代數關系來進行精確控制,其目的仍然是抑制電機推力/轉矩波動,實現恒推力/轉矩直接控制。由于對轉矩/推力及定子磁鏈直接進行控制,因而涉及到定子參考磁鏈的觀測問題。根據所跟蹤定子磁鏈運動軌跡的不同,電機控制分為直接自控制(Direct Self Control,DSC)和直接轉矩控制(Direct Torque Control,DTC)。目前,對參考定子磁鏈的確定已有一定的研究,但也都存在諸如無用功耗偏高、熱損耗增加等問題。為了克服系統容差帶來的影響,近年來又有學者將智能控制算法加入到電機直接轉矩/推力控制系統中優化其性能,也取得了一定的成果[28-29]。
以上控制方法的有效性依賴于對電機參數的預知程度和對電機狀態的檢測精度,當電機參數不能準確獲知或在電機運行過程中發生變化時,推力控制方法就必須輔以適當的參數估計和狀態觀測措施,實時校正控制模型,從而克服外部干擾以減小推力波動[30-32]。不過,這些估計和觀測方法只對某些特定的參數敏感,而不可能捕捉所有參數的變化,因而很難離開實驗室環境;而且這些方法都要求控制系統具有很高的檢測精度和運算處理能力,軟、硬件成本都很高。直線永磁電機由于受有限長動子邊緣磁通的影響,勢必會出現磁通變形、反電勢變形、相間不平衡和邊端力等邊端效應,這些現象對電機直接推力控制的影響機理與消除措施也被廣泛研究[33-34]。
2.3 儲能部件和熱量管理技術
對于電磁彈射系統儲能部件的選擇,要考慮其彈射飛機類型、功率密度、電流波形以及設計要求的每個單元電氣參數。圖8為EMKIT、EMCAT系統分別彈射各類型飛行器所需的能量。
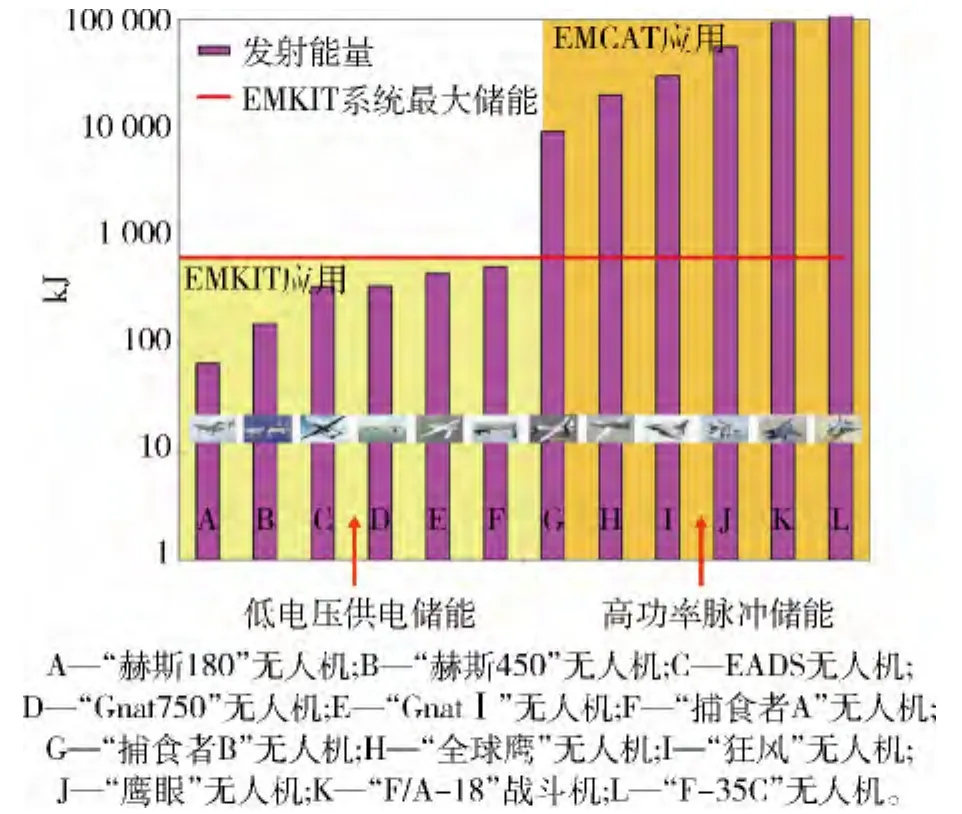
圖8 EMKIT、EMCAT系統彈射各類飛行器所需能量
從圖8可以看出:在低電壓供電模型下,EMKIT系統只能彈射質量小于“捕食者”無人機(1 000 kg)的中小型飛行器;當電磁彈射大載荷的飛行器時,就必須考慮使用其他儲能部件,一般選擇高壓供電儲能或飛輪強迫儲能裝置。在繞組大電流工況下,必須考慮電機推力密度、繞組發熱量控制等問題。EMALS預期定子效率為70%,峰值損耗為13.3 MW,如此大的耗損功率,冷卻是必要的,其采用去離子水繞組注入冷卻方式,冷卻水的進口溫度為35℃,壓力690 kPa,流量為1 363 L/min,經過循環冷卻后,可將峰值溫升由155℃降至75℃。另外,對于永磁式直線彈射器設計,還要防止電流高溫下的永磁體退磁現象。永磁體溫升主要由渦流效應引起,其產熱溫升相對較小,一般采用自然對流方式進行冷卻。繞組瞬態溫升主要集中在端部,通過增大水流量的水冷卻方式對降低短時峰值溫升的作用有限,提升水冷卻方式的散熱能力主要通過加強材料應用和工藝改進上[35]。通過對永磁體支撐套開槽或在兩側增加絕緣層隔離的方法,也能夠在一定程度上減小渦流效應,從而抑制永磁體溫升[19,36]。
3 研究展望
電磁彈射技術受到重視以來,國內外(以美國為主)的眾多研究機構對電磁彈射技術應用于EMALS展開了廣泛的研究。對于這一新興的衍生領域,學者們主要是通過對作為彈射器本體的直線電機進行理論建模和動態仿真以及控制方法的研究。具備高儲能密度及快速充放電特性的高功率脈沖電源和精確的循環整流控制系統仍是制約電磁彈射技術的關鍵因素。
3.1 深化慣性儲能和高功率循環逆變系統作用機理,開展彈射器關鍵組件研究
對于高功率輸出的電磁彈射器,補償式脈沖交流發電機和高功率循環變頻器是其最關鍵、技術難度最大的組件。從設計上看,高功率循環變頻器是通過多路橋式電路來獲得疊加和控制功率輸出的,是完全數字化管理的無電弧電能源變頻管理系統。補償式脈沖交流發電機作為電磁彈射器的儲能裝置,單個電機在10 s內向外輸出幾十甚至上百兆焦能量。在如此高功率輸出的情況下,儲能裝置和循環變頻器協同工作,既要功率輸出平穩可控,又要防止產生高壓電弧,這是極其復雜的控制過程。開展大容量慣性儲能系統和高功率循環逆變系統組件研制,深化高頻高功率脈沖儲能的泄放整流作用機理,是大載荷電磁彈射器工程化研制的基礎。
3.2 強化系統集成研究,為工程化樣機研制提供基礎
目前,美國已經完成了EMALS的調試運行試驗工作;英國的EMCAT系統也開展了多次的無人機彈射起飛試驗,系統調試集成運行成功。研制大功率輸出可調節的EMALS工程樣機工作,首先需要完成各系統組件研制以及縮比樣機的試驗研究;綜合考量各分系統之間的相互關聯性和協調性,使得各部分都能彼此協調工作,達到整體性能最優系統,為了達到此目標,系統集成工作的優劣至關重要。各系統組件集成工作,使得全系統是低成本、高效率、可擴充性和可維護的系統。因此,強化系統集成技術的研究、推動工程化樣機的研制必然成為今后研究工作的一個方向。
3.3 加強熱管理技術和電磁兼容與高電壓安全性研究,為裝備發展提供依據
目前,美軍對EMALS提出的熱能管理和電磁兼容與高壓安全的需求,已經開展了專門的適應性試驗。試驗顯示:18 m EMALS縮比樣機模型輸出效率僅為58%,而50 m 1/2樣機模型的效率也僅為63.2%。這證明能量利用率還有不足,熱功率也成倍增加。另外,在電磁彈射過程中產生的強磁場環境對機載電子設備影響的抑制也是一項重要內容。美軍在2012年進行的EMALS電磁干擾和電磁兼容適應性試驗表明:彈射過程中的電磁強脈沖干擾會在一定程度上影響機載電子設備正常工作,采取磁密封條增強磁屏蔽措施后的發射軌道完全能夠將局部強磁場降低到正常環境水平。電磁兼容與高電壓安全性研究是電磁彈射系統安全評估的一項重要的技術問題,加強開展這方面的研究將有利于建立裝備安全的試驗評估系統,為裝備的發展提供依據。
3.4 拓展應用領域
隨著技術的發展,電磁彈射技術應用可拓展到軌道交通牽引、高速車輛碰撞、初級火箭衛星發射等領域。在民用方面,電磁彈射系統作為非黏著型軌道交通牽引系統,可以滿足在建筑密集、地形復雜、丘陵地貌地區對軌道交通的特殊要求,實現低噪音、高爬坡等功能。同時,在軌道交通車輛碰撞試驗系統、周期性往復高速試驗系統中等都可得到廣泛應用。另外,超大功率電磁彈射系統可用于衛星的發射,代替初級火箭發射,由于可重復多次利用,維護工作量較少,因此單次發射成本會明顯降低。
[1] 李梅武,崔英,薛飛.航母飛機起飛的最佳選擇:電磁彈射系統[J].艦船科學技術,2008,30(2):34-37.
[2] 于瀛,池建文,陳昕.電磁飛機彈射系統[J].艦船科學技術,2003,25(4):51-53,56.
[3] Fair H D.Electromagnetic Launch Science and Technology in the United States Enter a New Era[J].IEEE Transactions on Magnetics,2005,41(1):158-164.
[4] 王兵,陳練.美軍航母電磁彈射器發展現狀[J].現代軍事,2009,386(3):44-47.
[5] Doyle M R,Samuel D J,Conway T,et al.Electro-Magnetic Aircraft Launch System:EMALS[J].IEEE Transactions on Magnetics(S0018-9464),1995,31(1):528-533.
[6] 鄒本貴,曹延杰.美軍電磁線圈發射技術發展綜述[J].微電機,2011,44(1):84-89.
[7] 趙宏濤,吳峻,余佩倡.電磁彈射技術發展綜述[EB/OL].(2013-01-29)[2014-03-01].http://www.doc88.com/P-739495486305.html
[8] 張曉帆.美國電磁彈射器在遭遇技術故障后恢復建造進度[EB/OL].(2010-05-11)[2014-03-01].http://www.dsti.net/Information/News/58837
[9] Reck B.First Design Study of an Electrical Catapult for Unmanned Air Vehicles in the Several Hundred Kilogram Range[J].IEEE Trans Magn,2003,39(1):310-313.
[10] Patterson D,Monti A,Brice C,et al.Design and Simulation of an Electromagnetic Aircraft Launch System[EB/OL].(2011-09-05) [2014-03-01]. http://wenku. baidu. com/view/311do9fd910ef12d2af9e7a6.html
[11] Huang L,Yu H T,Hu M Q,et al.Study on a Long Primary Flux-switching Permanent Magnet Linear Motor for Electromagnetic Launch Systems[J].IEEE Trans Plasma,2013,41(5):1138-1143.
[12] Patterson D,Monti A.Design and Simulation of a Permanent Magnet Electromagnetic Aircraft Launcher[J].IEEE Trans on Industry Applications,2005,41(2):566-575.
[13] Kou B Q,Huang X Z,Wu H X,et al.Thrust and Thermal Characteristics of Electromagnetic Launcher Based on Permanent Magnet Linear Synchronous Motors[J].IEEE Trans Magn,2009,45(1):358-362.
[14] 羅宏浩,吳峻,常文森.新型電磁彈射器的動態性能仿真[J].系統仿真學報,2006,18(8):2285-2288.
[15] Hwang S,Eom J.Cogging Torque and Acoustic Noise Reduction in Permanent Magnet Motors by Teeth Pairing[J].IEEE Trans Magn,2000,36(5):3144-3146.
[16] Magnussen F,Sadarangani C.Winding Factors and Joule Losses of Permanent Magnet Machines with Concentrated Windings[C]∥International Conference on Electric Machines and Drives.IEEE,2003:333-339.
[17] Inoue M,Sato K.An Approach to a Suitable Stator Length for Minimizing the Detent Force of Permanent Magnet Linear Synchronous Motors[J].IEEE Trans Magn,2000,36(4):1890-1893.
[18] Lee D,Kim G.Design of Thrust Ripple Minimization by Equivalent Magnetizing Current Considering Slot Effect[J].IEEE Trans Magn,2006,42(4):1367-1370.
[19] 趙宏濤,吳峻.金屬支撐套對開槽永磁直線電動機推力的影響[J].微特電機,2010,38(2):5-7.
[20] 項昌樂,韓立金,李宏才,等.基于多目標優化的雙模式混合驅動電機特性設計[J].北京理工大學學報,2010,30(12):1395-1399.
[21] 劉磊.高速無刷永磁電機的磁場分析[D].合肥:合肥工業大學,2007.
[22] 余莉,胡虔生,易龍芳.高速永磁無刷直流電機鐵耗的分析和計算[J].電機與控制應用,2007,34(4):10-14.
[23] 羅宏浩,吳峻,趙宏濤,等.永磁無刷直流電機換相控制研究[J].中國電機工程學報,2008,28(24):108-111.
[24] Safi S,Acarnley P,Jack A.Analysis and Simulation of the Highspeed Torque Performance of Brushless DC Motor Drives[J].IEE Proc Elect Power App,1995,142(3):191-200.
[25] Sebastian T,Gangla V.Analysis of Induced EMF Waveforms and Torque Ripple in a Brushless Permanent Magnet Machine[J].IEEE Trans on Industry Applications,1996,32(1):195-200.
[26] 趙宏濤,吳峻.定子磁鏈提前換相增加線永磁無刷直流電機的推力[J].中國電機工程學報,2011,31(3):118-122.
[27] Liu Y,Zhu Z Q,Howe D.Commutation-torque-ripple Minimization in Direct-torque-controlled PM Brushless DC Drives[J].IEEE Trans on Industry Applications,2007,43(4):1012-1021.
[28] 代睿,曹龍漢,何俊強,等.基于微粒群算法的無刷直流電機單神經元自適應控制[J].電工技術學報,2011,26(4):57-63.
[29] 陳維,王耀南.基于神經網絡的現代感應電機自適應L2魯棒控制[J].中國電機工程學報,2007,27(15):93-99.
[30] 尚晶,趙榮祥,竇汝振.基于自適應滑模觀測器的永磁同步電機無位置傳感器控制研究[J].中國電機工程學報,2007,27(3):23-26.
[31] 賈洪平,孫丹,賀益康.基于滑模變結構的永磁同步電機直接轉矩控制[J].中國電機工程學報,2006,26(20):135-138.
[32] 郭鴻浩,周波,左廣杰,等.無刷直流電機反電勢自適應滑模觀測[J].中國電機工程學報,2011,31(21):142-148.
[33] 趙宏濤,吳峻.一種消除直線永磁無刷直流電機邊端效應對換相時機影響的方法[J].國防科技大學學報,2010,32(4):126-130.
[34] Zhu Y W,Cho Y H.Thrust Ripples Suppression of Permanent Magnet Linear Synchronous Motor[J].IEEE Trans Magn,2007,43(6):2537-2539.
[35] 郭偉,張承寧.車用永磁同步電機的鐵耗與瞬態溫升分析[J].電機與控制學報,2009,13(1):83-87.
[36] 曲鳳波,何天運,陳婷婷.絕緣層對高壓永磁同步電動機永磁體溫升影響[J].哈爾濱理工大學學報,2011,16(1):75-79.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
體育科技文獻通報(2022年3期)2022-05-23 13:46:54
天津外國語大學學報(2021年3期)2021-08-13 08:32:18
遼金歷史與考古(2021年0期)2021-07-29 01:06:54
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
科技傳播(2019年22期)2020-01-14 03:06:54
裝備制造技術(2019年12期)2019-12-25 03:06:46
民用飛機設計與研究(2019年4期)2019-05-21 07:21:24
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
