基于死區逆變換補償的純電動轉向系統控制方法設計
2014-03-01 02:53:39梁松峰董鑄榮
重慶交通大學學報(自然科學版) 2014年3期
梁松峰,董鑄榮,2,邱 浩
(1. 深圳職業技術學院 汽車與交通學院,廣東 深圳 518055;2.北京交通大學 機電控制工程學院,北京 100044)
0 引 言
面對環境污染和能源危機兩大難題,電動汽車因其清潔無污染、能量來源多樣化等優點,得到逐步的推廣。區別于電動助力轉向系統,純電動轉向系統全部轉向動力由電機提供,采用線控的方式工作[1]。
純電動轉向系統的優點是:①取消了汽車上原有的轉向機械,使轉向系統結構簡化為“方向盤-ECU-電機”的結構;②轉向機構可以靈活布置,可以安裝在前輪或者后輪,甚至四輪轉向;③與電動汽車的驅動系統配合可以實現“原地轉向”、“橫撥”等傳統汽車無法實現的功能[2]。
這類轉向系統的缺陷也比較突出:①轉向負載比較重同時不能借助機械、液壓等動力,電機需要輸出較大的扭矩,雖然借助減速機構可以解決問題,但是減速機構的速比不能太大,否則會嚴重影響轉向的相應速度,因此需要在轉矩和轉速這兩個方面進行平衡;②由于車輪與車輪之間不存在機械連接,左右輪的轉角差需要有ECU來控制,控制稍有偏差便會導致汽車無法高速行駛;③由于電機的負荷較重,加上減速機構的摩擦等因素,存在較大的死區,在ECU實施控制時,電機的轉速與控制信號并不成正比例關系,使控制達不到理論、仿真的控制效果。
筆者通過采集試驗車轉向系統的相關數據以及分析轉向系統的結構和工作原理,獲得了轉向系統各組成部分的數學模型;基于這些數學模型使用MATLAB進行仿真,比較“普通PID控制”與“基于死區逆變換補償PID控制”[3]在控制效果上的區別;將仿真使用的數學模型以及參數移植至試驗車上的ECU進行驗證。實車驗證結果表明:筆者提出的控制方法能夠消除死區帶來的不良影響,提高了轉向控制的質量。
1 轉向系統的實物與結構
項目研究平臺為“四輪獨立驅動線控轉向電動汽車”,該車由奇瑞QQ車改裝而成,改裝的過程把原QQ車的發動機、轉向系統、懸架去掉,然后課題組自己設計驅動、轉向、懸架并重新布置安裝,形成了一部電動驅動電動轉向的試驗車(圖1)[4],裝后的試驗車的總質量為1 144 kg,軸距為1 318 mm,輪距為2 114 mm。

圖1 試驗車Fig.1 The test vehicle
根據系統的設計,畫出轉向控制系統結構框圖,如圖2。圖中,θ為方向盤角度,控制系統根據該角度計算對應的車輪應有的轉角,并與車輪轉角α比較,經過控制算法計算出控制量u,傳遞給控制器,經過電機、減速機構、齒輪機構作用到車輪上,形成轉角的閉環控制。

圖2 轉向控制系統結構Fig.2 Structure of steering control system
2 轉向控制系統數學模型
基于理論分析以及仿真確定參數的需要,筆者經過實驗數據采集、分析與理論推導獲得了角速度-車輪轉角的數學模型以及轉向機構數學模型,兩者一起構成控制系統的控制對象。本系統是計算機控制系統,控制算法、控制對象都必須使用離散數學模型來描述。
2.1 角速度與車輪轉角的離散數學模型
角速度的定義如式(1),在計算機控制系統中,該式離散化的描述形式如式(2),由式(2)可以推導出描述車輪轉角與角速度的關系的差分方程,如式(3):
(1)
(2)
(3)

2.2 轉向機構的離散數學模型


圖3 轉向機構特性Fig.3 Characteristics of the steering mechanism

(4)
在轉向系統中,由試驗數據獲得的式(4)的各參數如下:Δ+=0.47 V,K+=45 (°)/(s·V),Δ-=-0.45 V,K-=41 (°)/(s·V)。
3 死區逆變換補償方法
死區逆變換補償的本質是把帶有死區的非線性的系統通過逆函數補償的處理變成線性系統,經過變換后可以使PID控制發揮最好的效果,并且能比不變換的系統更快消除靜差[6]。死區逆變換補償的是一種軟件算法,它能夠在不改變硬件系統的情況下,消除執行機構死區帶來的影響,使得在實施控制的時候,控制對象對于PID算法來說呈良好的線性關系,它在控制系統中的位置如圖4。

圖4 死區逆變換補償在系統中的位置Fig.4 Position of the dead-zone inverse transforming compensation in the system
死區逆變換補償按照如下步驟來進行:
3)求取死區逆變換補償函數,見式(5):
u′=h(u)=g-1(f(u))
(5)
對逆變換補償方法的證明如式(6):
(6)
以文中控制對象為例,其死區逆變換函數補償為:
(7)
死區逆變換補償的過程可以用圖5說明。可以看出,經過逆變換后,PID控制對象的死區被消除了,呈良好的線性。在文中轉向系統中,選取K=1。
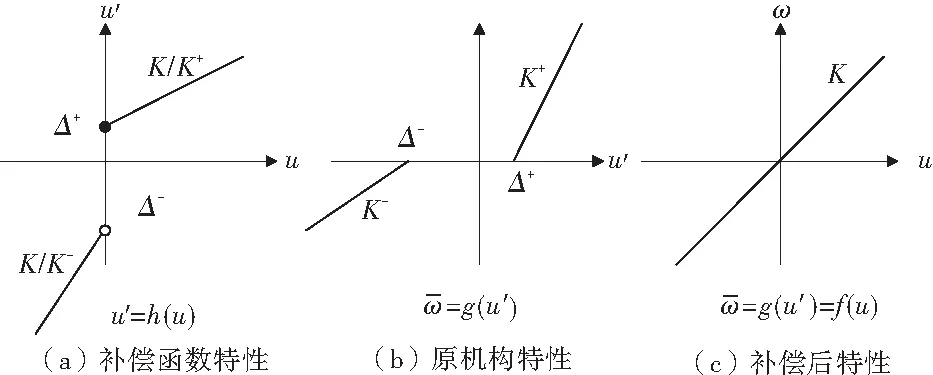
圖5 死區逆變換圖解Fig.5 Diagram of dead-zone inverse transforming
4 死區逆變換補償方法的MATLAB 仿真驗證及參數整定
將文中推導的數學模型以及控制算法輸入MATLAB進行軟件仿真[7],獲得了兩種情況下的控制效果。
按照普通PID控制方法,不對死區處理時,由于存在死區,并且死區比較大,所以控制結果是存在比較大的靜差,為了消除靜差必須增大比例kp或者減少積分時間ti,這樣造成較大的超調,減小超調的方法是增大微分時間,這樣又出現了抖動[8],因此效果總不太理想,圖6是相對好一些的控制效果,靜差=0.83~5.97°,此時PID控制參數為:ts=0.5 s,kp=0.025,ti=5 s,td=1 s。
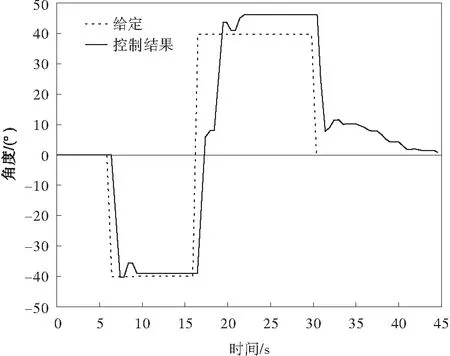
圖6 一般PID控制效果Fig.6 Control effect of general PID
經過逆變換補償消除死區后,由于死區被消除,控制效果的靜差比較小,通過調節其他參數可以獲得比較好的控制效果,靜差為0.04~0.13°,如圖7。此時PID參數為:ts=0.5 s,kp=0.7,ti=600 s,td=0.1 s。

圖7 帶死區逆變換補償的PID控制效果Fig.7 Control effect of PID with dead-zone inverse transforming compensation
5 實車驗證
將MATLAB仿真確定的參數用于實車的控制,控制過程中的轉角目標值以及轉角反饋值通過ECU的串行通信接口實時上傳至電腦,將電腦接收到的數據輸入Excel畫出曲線可以看到控制的效果。
圖8為使用一般PID的控制實車實驗效果,試驗過程中發現,由于死區影響比較顯著,圖6仿真的比例系數kp偏小,實驗中將kp修正為0.05,即圖8是在控制參數為ts=0.5 s,kp=0.05,ti=5 s,td=1 s時獲得的控制效果,此時靜差為3.95~4.24°。

圖8 一般PID實車控制效果Fig.8 Control effect of general PID real vehicle
圖9為使用一般PID的控制實車實驗效果。試驗使用的控制參數與圖7仿真參數完全一致。但是,把該方法應用于實車時發現,如果直接運用式(7),有時候車輪會有小幅抖動。分析可知這是由于機械潤滑狀況與電路溫度發生漂移,式(7)中的Δ+與Δ-存在小幅漂移,如果實際的死區比算法中的死區小,控制系統會輸出比實際需要大的控制量,導致出現抖動。因此,在實驗時對式(7)進行了改進,變為式(8)的形式:

(8)
式(8)把算法中的死區修改為測量死區的0.95倍,即留了0.05Δ的控制裕度,以防實際死區縮小。也就是說,使用式(8)做死區逆變換補償后,實質上還有0.05Δ左右的死區(該死區可能隨著機械潤滑狀況或者電路溫度漂移而變化),但是從實際控制效果圖可以看出該方法實質上消除了95%的死區范圍,同時獲得了更加穩定、更小靜差的控制效果,此時靜差為0.28~0.42°。

圖9 一般PID實車控制效果Fig.9 Control effect of general PID real vehicle
6 結 語
電動汽車中所需的動力基本上都是使用電機來控制的,電機執行機構在負載較重時會有比較大的死區,死區的存在影響控制效果容易產生較大的靜差。筆者建立了一種純電動轉向系統的數學模型,以MATLAB為工具,對比了使用“死區逆變換補償”方法前后的轉向控制效果,并將MATLAB仿真的數學模型以及參數應用于實車。經過實驗驗證可知,筆者提出的“死區逆變換補償”方法是行之有效的,將它應用到帶死區的轉向系統控制中可以減小死區帶來的偏差,提高控制的質量。
[1] 苑林.汽車電動轉向系統的研究[D].吉林:吉林大學,2007.
Yuan Lin. Study on Vehicle Electric Power Steering System [D]. Jilin: Jilin University, 2007.
[2] 董鑄榮,賀萍,邱浩,等.各輪獨立轉向及驅動的電動汽車及其轉向與驅動控制方法:中國,200910310310.2[P].2010-06-02.
Dong Zhurong, He Ping, Qiu Hao, et al. System and Controlling Method for Independent Steering and Independent Driving of Automobile Wheel: China,200910310310.2 [P].2010-06-02.
[3] Tian M, Tao G. Adaptive Output Dead-Zone Compensation[C]. San Diego, California, USA: The 36thConference on Decision & Control, 1997: 1157-1161.
[4] 鄧志君,董鑄榮,馬德糧.電動轎車獨立轉向輪懸架設計[J]. 汽車技術,2010(12):37-41.
Deng Zhijun,Dong Zhurong,Ma Deliang. Suspension design of the independent steering wheel for electric car[J]. Automobile Technology, 2010(12): 37-41.
[5] 文彩虹,蔣東方,晁敏. 直流力矩電機控制死區的在線檢測與補償[J]. 測控技術,2010(4):35-38.
Wen Caihong, Jiang Dongfang, Chao Min. On-line dead-zone detection and compensation for DC torque motor control systems[J]. Measurement & Control Technology, 2010(4): 35-38.
[6] Huang R N,Lou Y J,Chi G X. Research on Servo Feeding System of Micro WEDM[C]. Changsha,Hunan,China: 2010 International Conference on Digital Manufacturing & Automation, 2010: 271-274.
[7] 劉金琨. 先進PID控制及其MATLAB仿真[M].北京:電子工業出版社,2003.
Liu Jinkun. Advanced PID Control and MATLAB Emulation [M]. Beijing: Publishing House of Electronic Industry,2003.
[8] 吳麒,王詩宓. 自動控制原理:上冊[M].2版.北京:清華大學出版社,2006:125-133.
Wu Qi,Wang Shimi. Principle of Automatic Control: PartⅠ[M]. 2nd ed. Beijing: Tsinghua University Press, 2006.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
中老年保健(2021年12期)2021-11-30 02:58:01
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
攝影之友(影像視覺)(2019年2期)2019-03-05 08:27:14
中華詩詞(2018年11期)2018-03-26 06:41:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
Coco薇(2016年8期)2016-10-09 02:11:50
