基于Monte Carlo采樣策略的UKF算法應(yīng)用
2013-12-06 08:46:42萬某峰趙長勝陳士城
測繪工程 2013年1期
萬某峰,趙長勝,王 飛,陳士城
(徐州師范大學(xué) 測繪學(xué)院,江蘇 徐州 221116)
由于近似非線性函數(shù)的概率密度分布比近似其函數(shù)更容易。因此,UT變換選擇一組點集(Sigma點集)來表征輸入狀態(tài)的分布特征,再將非線性變換應(yīng)用于Sigma點,得到非線性轉(zhuǎn)換后的點集,對轉(zhuǎn)換后的點集通過加權(quán)計算得到統(tǒng)計特性。UT變換算法的關(guān)鍵是Sigma點采樣策略,由采樣策略得到的Sigma點集要能保證輸入變量的分布特征,體現(xiàn)非線性函數(shù)本身的非線性[1-7]。Monte Carlo模擬方法的基本思想是面對一個問題,首先建立與描述該問題有相似的概率模型,然后對模型進行隨機模擬或統(tǒng)計抽樣,即產(chǎn)生一組隨機數(shù)來模擬該隨機模型,它的分布與該隨機模型相同,再以該隨機數(shù)的統(tǒng)計特征作為原始問題的近似解[8]。使用Monte Carlo模擬方法生成符合輸入狀態(tài)分布的隨機變量,符合UT變換思想。
1 非線性系統(tǒng)的卡爾曼濾波
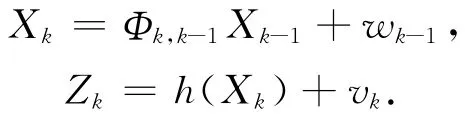
設(shè)某非線性系統(tǒng)模型如下:

式(1)為狀態(tài)模型,式(2)為量測模型。式中:xk為k時刻狀態(tài)向量,uk-1為控制向量,wk-1為模型噪聲向量,zk為k時刻的觀測向量,vk為量測噪聲向量,這里假設(shè)wk-1和vk均為高斯白噪聲,即均值為0,方差分別為Qk-1和Rk。
假設(shè)所有的隨機變量均服從高斯分布,非線性卡爾曼濾波公式如下:
預(yù)測方程
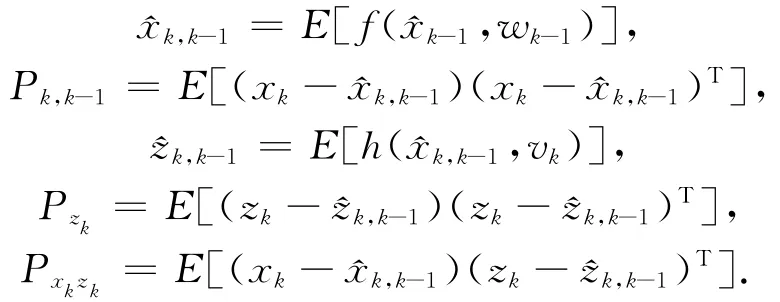
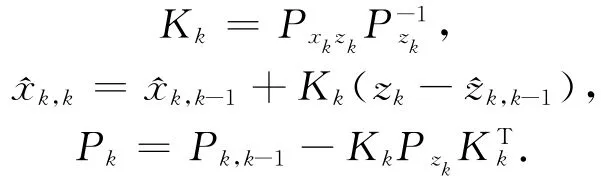
更新方程
2 基于Monte Carlo采樣策略的UKF算法
這里考慮wk-1和vk均為加性噪聲,并且狀態(tài)方程為線性,觀測方程為非線性,設(shè)系統(tǒng)的狀態(tài)滿足高斯分布,系統(tǒng)模型為
假設(shè)wk-1和vk互不相關(guān),且協(xié)方差矩陣分別為Qk-1和Rk,n維隨機變量X初始狀態(tài)的均值和方差分別為x0和P0,即隨機變量X服從高斯分布。
2.1 Monte Carlo采樣策略
Monte Carlo采樣策略的關(guān)鍵是產(chǎn)生符合輸入狀態(tài)分布的隨機數(shù),隨機數(shù)產(chǎn)生步驟:
1)確定一個數(shù)學(xué)模型或某種規(guī)則;
2)規(guī)定初始值;
3)按一定的步驟產(chǎn)生隨機數(shù),重復(fù)下去,得到隨機數(shù)序列。
這里直接調(diào)用MATLAB軟件帶有的高斯分布隨機數(shù)產(chǎn)生函數(shù)—normrnd函數(shù)[9-10]

返回m個均值為ave,標準差為sig的高斯分布的隨機數(shù)A。
采用Monte Carlo采樣策略,對均值為x0,方差為P0的n維隨機變量X,生成的m個χ(Sigma點集)為

其中:(x0)i表示x0的第i個值,表示P0第i個對角線元素的平方根值。
2.2 UKF算法步驟
1)根據(jù)k-1時刻的狀態(tài)估計值和其協(xié)方差Pk,計算狀態(tài)預(yù)測值和協(xié)方差Pk,k-1。

2)由和Pk,k-1,采用Monte Carlo采樣策略生成Sigma點集

3)通過非線性量測方程傳遞Sigma點,計算預(yù)測值和其協(xié)方差Pzk。

4)計算濾波增益和k時刻狀態(tài)估值^Xk,k和其協(xié)方差Pk。

3 仿真實驗分析
一個在二維平面內(nèi)運動的質(zhì)點M,初始位置(0,3 000),它以初速度Vx=10m/s,Vy=50m/s,加速度ax=2m/s2,ay=-4m/s2運動,假設(shè)一坐標位置為(0,0)雷達對M進行測距rk和測角φk,系統(tǒng)噪聲和測量噪聲均為加性噪聲,狀態(tài)向量為Xk=,量測向量為Zk=[zk1,zk2]T,建立卡爾曼濾波模型

其中:
假設(shè)系統(tǒng)噪聲wk和vk協(xié)方差分別為Qk和Rk,二者不相關(guān)。MonteCarlo采樣策略生成Sigma點數(shù)為5 000,采樣時間t=0.5s,觀測次數(shù)100次。
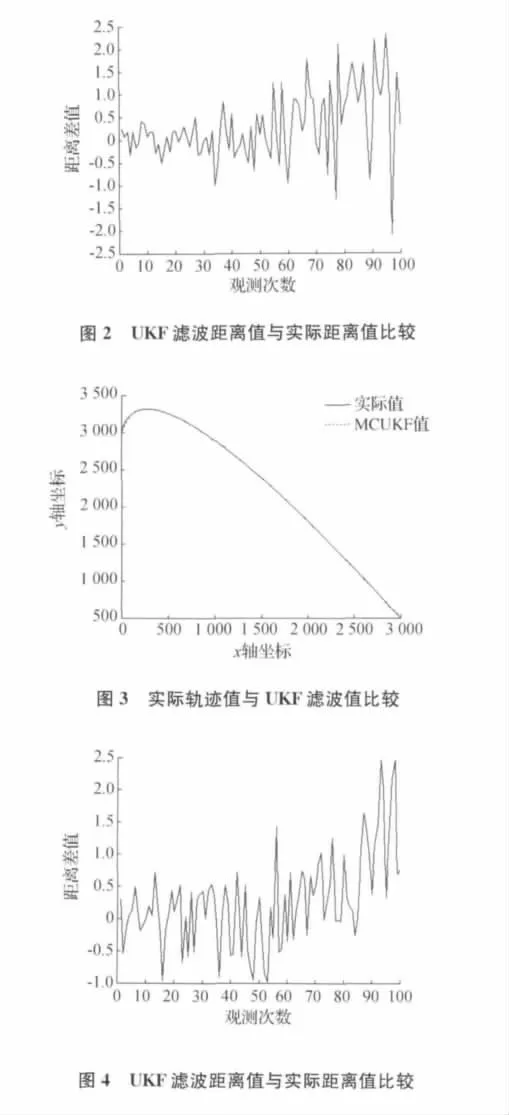
當(dāng)R=diag[0.09 0.0012],Q=diag[10 10 0.01 0.01 0.0120.012]時,比較結(jié)果見圖1、圖2。

圖1 實際軌跡值與UKF濾波值比較
當(dāng)R=diag[0.09 0.0012],Q=diag[100 100 0.01 0.01 0.0120.012]時,比較結(jié)果見圖3、圖4。
當(dāng)R=diag[10 0.0012],Q=diag[1 1 0.01 0.01 0.0120.012]時,比 較結(jié)果見圖5、圖6。
當(dāng)R=diag[100 0.0012],Q=diag[1 1 0.01 0.01 0.0120.012]時,比 較結(jié)果見圖7、圖8。
1)從圖1、圖3、圖5、圖7,可以看出,在模型誤差和觀測誤差不是很大時,利用MonteCarlo采樣策略的UKF濾波結(jié)果均能很好地跟蹤目標。
2)比較圖2和圖4,可以得到,在觀測誤差較小的情況下,模型誤差的大小對UKF濾波結(jié)果影響較小,即此時濾波結(jié)果精度更依賴觀測值精度。
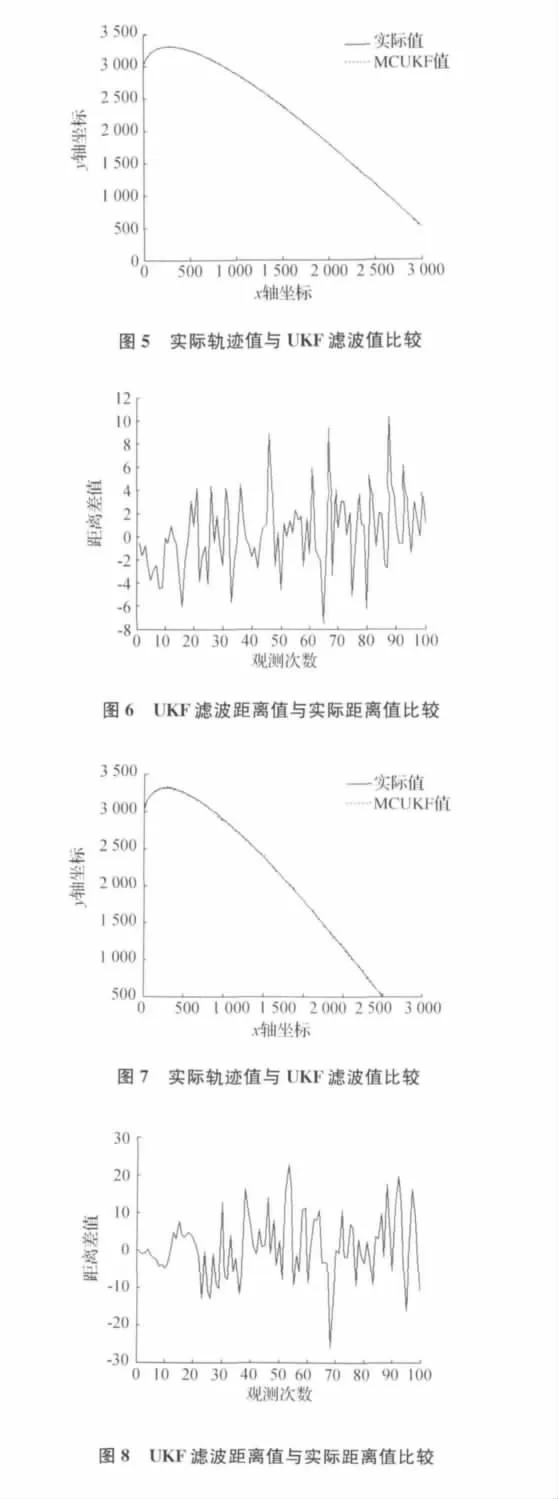
3)比較圖6和圖8可以得到,在模型誤差保持不變的情況下,觀測誤差對UKF濾波結(jié)果影響較大。
4 結(jié)束語
MonteCarlo采樣策略是一種隨機性采樣方法,保證了得到的Sigma點集符合輸入狀態(tài)分布特征,再用大量的Sigma點逼近概率密度分布,從而得到更高階近似,充分體現(xiàn)了非線性函數(shù)本身的非線性。采用MonteCarlo采樣策略的UKF具有一定的實用性和參考價值,因此,可做進一步應(yīng)用研究。
[1]王新洲.非線性模型參數(shù)估計理論與應(yīng)用[M].武漢:武漢大學(xué)出版社,2002.
[2]JULIER S J,UHLMANN J K,DURRANT-WHYTE H F.A New Approach for Filtering Nonlinear System[C]//Proceeding of the American Control Conference.USA:IEEE,1995:1628-1632.
[3]JULIER S J,UHLMANN J K,DURRANT-WHYTE H F.A New Method for the Nonlinear Tranformation of Means and Covariances in Filters and Estimators[J].IEEE Trans,Automatic Control,2000,45(3):477-482.
[4]JULIER S J,UHLMANN J K.Unscented filtering and nonlinear estimation[J].Proceeding of the IEEE,2004,92(3):401-422.
[5]JULIER S J.The spherical simplex unscented transformation[C]//Proceeding of the American Control Conference.USA:IEEE,2003:2430-2434.
[6]程水英.無葉變換與無葉卡爾曼濾波[J].計算機工程與應(yīng)用,2008,44(24):25-35.
[7]劉也,余安喜,朱炬波,等.加性噪聲條件下的UKF算法[J].中國科學(xué),2010,40(11):1286-1299.
[8]王中宇,劉智敏,夏新濤,等.測量誤差與不確定度評定[M].北京:科學(xué)出版社,2008.
[9]鄧薇.MATLAB函數(shù)速查手冊[M].北京:人民郵電出版社,2010.
[10]李海濤,鄧櫻.MATLAB程序設(shè)計教程[M].北京:高等教育出版社,2010.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
中學(xué)生數(shù)理化(高中版.高考理化)(2020年2期)2020-04-21 05:32:50
小學(xué)生作文(低年級適用)(2019年9期)2019-10-08 08:37:10
數(shù)學(xué)大世界(2018年1期)2018-04-12 05:39:14
北京航空航天大學(xué)學(xué)報(2017年9期)2017-12-18 07:12:25
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
電源技術(shù)(2016年9期)2016-02-27 09:05:39
電源技術(shù)(2015年1期)2015-08-22 11:16:28