基于三維激光掃描數據的三維實景構建
2013-12-06 08:50:30赫春曉
測繪工程 2013年1期
關鍵詞:測量
赫春曉,李 浩
(河海大學 地球科學與工程學院,江蘇 南京 210098)
地面三維激光掃描作為一種可以快速獲取空間數據的新型技術,越來越多地被應用于城市建模、工程建設等領域。三維激光掃描技術又稱“實景復制技術”[1],不同于傳統測量技術的單點定位方式,而是利用激光測量單元進行從左到右、從上到下的全自動高精度步進測量,進而得到完整的、全面的、連續的、關聯的全景點的三維坐標[2]。本文以Trimble地面三維激光掃描儀為例,以地物作為采集對象,進行三維構建。
1 基于網格的數據壓縮
三維激光掃描獲得的點云數據,其數據量比較大,在建立三角網時,會導致三角形過小、過多,導致計算慢、效率不高;而在本文三維場景的構建中,不需要過于細密的三角網,所以要對點云數據進行壓縮。
本文采用了基于網格的壓縮方法,其基本原理為將原始數據置于一個長方體中,長方體的長、寬、高分別為:L=Xmax-Xmin,W=Ymax-Ymin,H=Zmax-Zmin,然后將該長方體分成l×m×n個小長方體。統計第(i,j,k)號長方體內的點個數,然后對這些點計算特征量,并保留特征量最大點[3]。
在該原理的基礎上,本文做了一定改進,采用了自適應邊長,該邊長由公式l=得到,然后將點云的各個點依次放入相應小立方體,由式(1)可得某點隸屬的立方體:
再根據每個小立方體內的點云點計算得到其均值作為中間值,然后保留到該中間值距離最小的點,刪除剩余點。
2 三角網數字地面模型的建立
2.1 Lawson逐點插入算法
Lawson逐點插入算法[4]的基本思想是:在一已存在的三角網中插入一個點,將該點與包含它的三角形的3個頂點相連,形成新的3個三角形,然后用對角線交換法來優化新形成的三角形,從而保證所建三角網為Delaunay三角網。
其基本步驟為:
1)建立包含所有數據點的初始多邊形,該多邊形可為1個正三角形或2個直角三角形組成的矩形。
2)從數據域中取出任一點P,做如下工作:
找出包括點P的三角形T,設T的3個頂點為V1,V2,V3;
P與T3個頂點相連,形成3個新的三角形T1,T2,T3;
對所有新形成的三角形,用LOP算法進行優化。
3)裁剪數據范圍外的多余三角形。
2.2 點在三角形中的判斷
算法中要確定插入點所在的三角形,根據三角網拓撲關系和三角形面積坐標可以對該點是否在三角形內作出判斷。
設三角形3個頂點為V1(x1,y1),V2(x2,y2),V3(x3,y3),任給點為P(x,y),按有限元理論,P在三角形△V1V2V3內的面積坐標L1,L2,L3定義為

式 中:A為△V1V2V3面 積;A1,A2,A3分 別 為△V2V3P,△V3V1P,△V1V2P的面積。
當L1,L2,L3都大于0時,該點在該三角形內;否則則在該三角形外。
2.3 三角化過程三角形拓撲關系的創建
在當前三角網中插入一點P時,利用2.2方法判斷插入點的位置(當插入點落在三角形邊上時,三角形的拓撲關系維護比較麻煩。為維護程序的穩定性和通用性,在保證計算精度和數據范圍的條件下,本文對共線點位置施加一微小的改正數,即將共線點轉化為點在三角形內[5]),確定其所屬三角形,同時修改新增加三角形數拓撲組成。由于每插入一點三角形數目增加2個,故拓撲的修改只要對這3個三角形即可,其偽代碼為:for i=0to n
tempTr//存儲當前的三角形
trNumID[0]=curTrNumIndex//當前的三角形號
trNumID[1]=trNum++//trNum為當前三角形個數
trNumID[2]=trNum++
newTr1.pt[0]=tempTr.pt[0]
newTr1.pt[1]=tempTr.pt[1]
newTr1.pt[2]=i//插入點的點號
newTr1.tr[0]=tempTr.tr[0];
newTr1.tr[1]=trNumID[1]
newTr1.tr[2]=trNumID[2]
newTr2.pt[0]=tempTr.pt[1]
newTr2.pt[1]=tempTr.pt[2]
newTr2.pt[2]=i//插入點的點號
newTr2.tr[0]=tempTr.tr[1];
newTr2.tr[1]=trNumID[2]
newTr2.tr[2]=trNumID[0]
newTr3.pt[0]=tempTr.pt[2]
newTr3.pt[1]=tempTr.pt[0]
newTr3.pt[2]=i//插入點的點號
newTr3.tr[0]=tempTr.tr[2];
newTr3.tr[1]=trNumID[0]
newTr3.tr[2]=trNumID[1]
End
依照2.1節步驟遍歷點云中的所有點構建三角網,完成地物的建模過程。
3 紋理映射
本文在紋理映射過程中,不同于計算機圖形學一般常用的cutmall、二步法等紋理映射方法,創新性將攝影測量空間后方交會及共線方程引進來并進行映射。
3.1 三維激光掃描數據的二維球面映射
利用Trimble三維激光掃描儀獲取點云的空間坐標(X,Y,Z)和激光強度(R)。由三維激光掃描儀測量原理及其激光點坐標計算公式[6],本文將三維激光數據映射到球面即α,θ面,其中α為橫向掃描角度觀測值,取值范圍為(0,2π),θ為縱向掃描角度觀測值,取值范圍為(-π/2,π/2),具體公式為
再將映射到球面的點云以Δα,Δθ等角劃分,形成二維矩陣,建立點云各個點對應的矩陣位置坐標,其計算公式為
其中:M為二維矩陣的行數,N為二維矩陣的列數。
從已知的點云數據中,無法直接得到Δα,Δθ的值,本文提出一種自適應方法通過點云空間坐標間接得到Δα,Δθ的值:由點云空間坐標計算得到α,θ的最值,得總面積(αmax-αmin)(θmax-θmin),每個點的面積為Δα×Δθ,從而得到Δα,Δθ的值為

式中n為點云總數。
該方法對于點云數據球面映射后分布越均勻、掃描時水平間距和垂直間距越接近,得到的結果精度越高。
通過上述方法得到三維激光數據的二維矩陣形式,再將該矩陣對應柵格中的點云強度計算該位置的特征量,將該特征量作為最后顯示圖像的局部像素值,這里特征量以柵格內各點云強度的均值作為最終值。將得到的位圖作為內外方位元素的計算時同名控制點的選取所用的圖像。
二維激光強度圖像矩陣為
3.2 影像內外方位元素的計算
單像空間后方交會中,計算內外方位其中一種方法是共線條件方程解法,即以像點的像空間坐標和相應物點的工程坐標系坐標為已知條件,將共線方程線性化,列出條件方程,經過最小二乘平差以及迭代計算,求出像片內外方位元素[7]。本文將激光數據按照3.1節所述的拓撲結構映射到二維平面以圖像形式顯示,再同實際相片比較,選擇同名點由共線方程經過平差計算得到內外方位元素。
計算內外方位元素時,要保證三維激光坐標需同近景攝影測量坐標系方向大致相同,才能進行計算。本文三維激光掃描儀的坐標系中,X軸、Y軸都在橫向掃描面內,Z軸垂直橫向掃面[8];而近景攝影測量的像空間輔助坐標系是以攝影中心S為坐標原點,X軸、Y軸同像平面坐標系X,Y軸平行,Z軸與主光軸重合。而主光軸的方向基本同三維激光坐標的橫向掃描面一致,因此三維激光坐標系的Z軸和近景攝影坐標系z軸基本上是垂直的,無法直接解算相機的內外方位元素,需要進行坐標變換。轉換公式為
其中:α=(maxα+minα)/2-π/2,α為橫向掃描角度觀測值。
根據求得的內外方位元素,可以計算得到目標點云在相應攝像機圖像處的位置坐標,再分別除以攝像機圖像原尺寸的寬度和高度,得到相應的紋理坐標,最后利用OpenGL相關函數完成紋理映射,紋理映射步驟如下:
1)將外部圖像數據讀入內存,用auxDIBImage-Load()函數可以實現;
2)調用glGenTextures()函數創建一個紋理,該函數參數為第一步返回的指針;
3)調用glBindTexture()函數綁定紋理;并進一步通過glTexImage2D()函數生成紋理,同時還必須指定紋理數據的指針、紋理的大小、紋理類型等;
4)調用glTexParameter()函數控制紋理的映射方式,包括:紋理濾波、重復與縮放;
5)將紋理坐標作為參數調用glTexCoord()函數。
4 實驗與結論
試驗數據由Trimble三維激光掃描儀采集得到,以Visual Stdio6.0作為開發平臺,用VC++語言開發完成了整個三維場景的顯示。圖1為試驗結果圖。
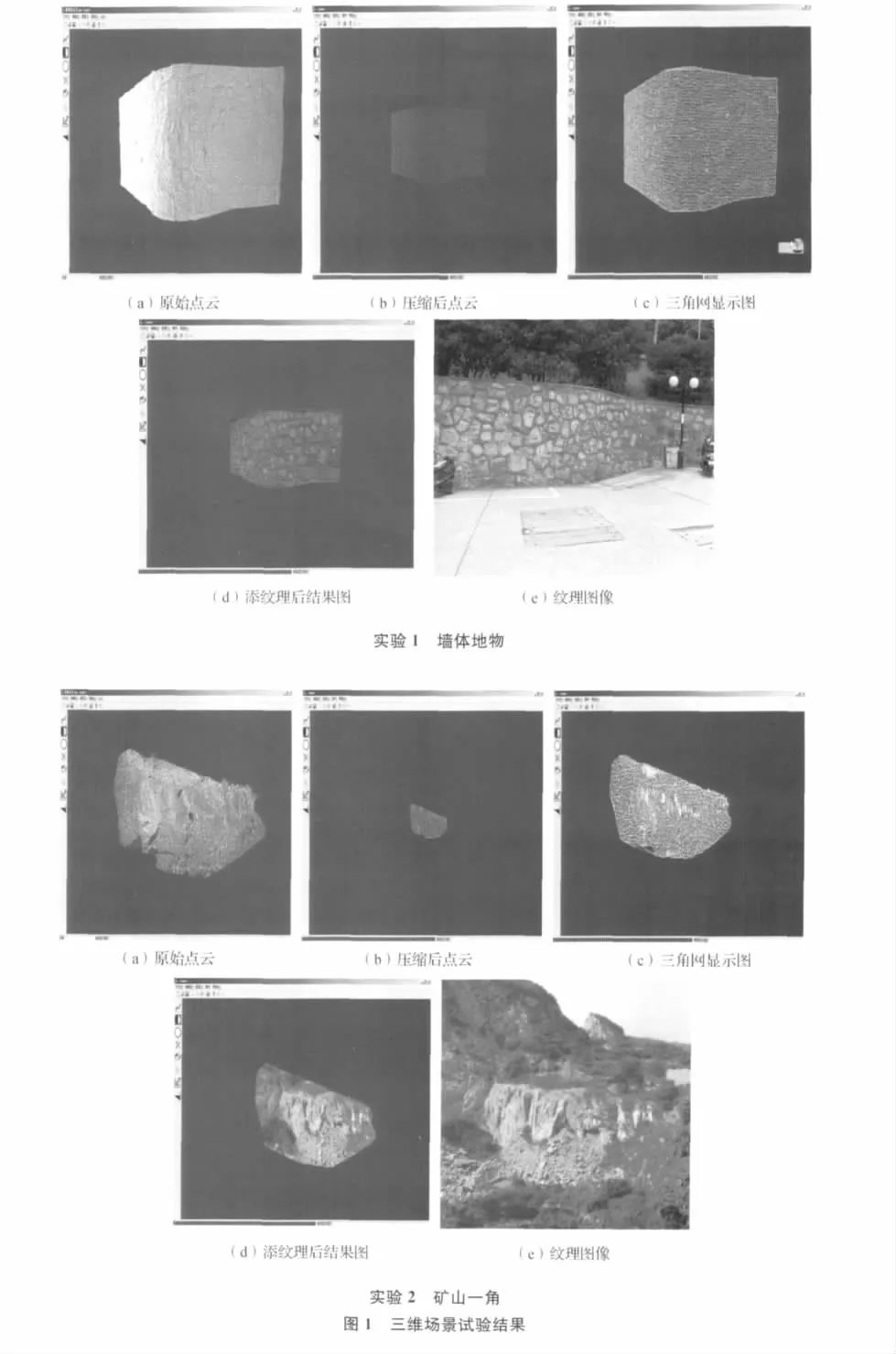
原始點云總數331 883,壓縮后點云為8 152,壓縮率97.6%;構建三角網用時0.063s,共15 420個三角形,構網效率較高。
原始點云總數99 239,壓縮后點云為4 111,壓縮率95.9%;構建三角網用時0.031s,共7 463個三角形,構網效率較高。
從試驗結果可以看出,本文中壓縮算法壓縮率高,比較適用于一般精度要求不高、效率要求較高的情形;三角網構建用時較短、效率較高,構建的三角網符合Delaunay三角網的要求,在實驗二構建的三角網中可以看到部分三角網突起,這是由于掃描儀分辨率的設置過大導致該處點云的部分丟失,出現了孤立的點云,而本文沒有對其進行粗差剔除;從最終紋理的映射結果可知,本文提出的利用空間后方交會及共線方程求紋理坐標的方法是可行的,能夠滿足一定的精度要求,同時也可以看到有些部位的紋理放大后不清晰,這是由于該處點較少,導致三角網中的三角形過大,紋理不豐富,放大后會出現模糊,造成紋理拉花現象;點較多的部分紋理豐富,不會出現模糊現象。
[1]范海英,楊倫,邢志輝,等.Cyra三維激光掃描系統工程應用研究[J].礦山測量,2004(3):16-19.
[2]毛方儒,王磊.三維激光掃描測量技術[J].宇航計測技術,2005,25(2):1-6.
[3]吳杭彬,劉春.三維激光點云數據的空間壓縮[J].遙感信息,2006(2):22-24.
[4]LAWSON C L.Software for C1Surface Interpolation[M].Mathematical SoftwareⅢ.J.Rice,Ed.New-York:Academic Press,1977.161-194.
[5]劉學軍,王永君,車偉濤,等.三角剖分中拓撲關系的動態創建與維護[J].湖南科技大學學報:自然科學版,2008,23(2):79-83.
[6]宋宏.地面三維激光掃描測量技術及其應用分析[J].測繪技術裝備,2008,10(2):40-43.
[7]李德仁,周月琴,金為銑.攝影測量與遙感概論[M].北京:測繪出版社,2001.
[8]吳靜,靳奉祥,王健.基于三維激光掃描數據的建筑物三維建模[J].測繪工程,2007,16(5):57-60.
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00