客運專線無碴軌道精密定軌測量方法及精度分析
2013-12-06 08:50:52張福榮
測繪工程 2013年1期
王 濤,張福榮
(陜西鐵路工程職業技術學院 測繪工程系,陜西 渭南 714000)
無碴軌道是一種將鋼軌通過彈性扣件緊密固定在一個以混凝土為基礎的軌道基座的鐵路建筑技術。與傳統的有碴軌道相比,無碴軌道具有結構簡單、穩定性高、軌道養護維修量小、鋪設方便和彈性好等優點,成為客運專線研究和發展的必然趨勢。較有碴軌道而言,無碴軌道就是軌道的高平順性,它直接限制著列車的運行速度,線路必須具備非常準確的幾何線形參數,誤差必須保持在毫米級的范圍內,對定軌測量精度要求很高[1-2]。理論和實踐證明,軌道的高平順性和精度控制成為無碴軌道鐵路建設成敗的關鍵因素之一[3-4]。
1 客運專線無碴軌道精密定軌測量方法
1.1 無碴軌道精密定軌測量控制方法
依據2009-10-31鐵道部發布的《高速鐵路工程測量規范》[5]中各級平面控制網布網要求,用于無碴軌道精密定軌測量的CPIII控制網采用自由重疊設站邊角交會測量方式。該方式在測量過程中采用50~70m一對點的方式進行布點,布點過程中使用銷釘和相關配件,采用強制對中方式,降低了測點的對中誤差。使用自動瞄準目標的全站儀測量,每次測量點的誤差以橫向誤差控制,既避開了難以達到的測角限差指標,又可以保證各點的橫向誤差在1mm之內;每個點通過至少3次不同設站的交會測量,保證了點的可靠度。后方交會網測量方式從理論上講可以一次將鋼軌調整到設計位置,一次測量,永久受用;軌道施工時,精調可一次調整到位,養護維修時擋塊選擇也十分方便[6]。但是相對導線網來說,后方交會網的布設和測量成本較高。
1.2 測站近似坐標計算
測站近似坐標計算的目的是得到測站點的近似坐標,為后續測站點坐標測量與平差打下基礎。測站坐標與方位角平差包含2個方面的內容:一方面是精確測量、計算測站點坐標,這是保證軌道中心位置測量精度的基礎;另一方面,精確計算測站坐標方位角,是保證軌道中心位置測量中橫向誤差精度的主要方面。為保證計算數據達到較高的精度,平差方法應采用抗差估計理論[7]。平差結束應對測站坐標與方位角能否滿足小車棱鏡測量的精度以及測量可靠性進行科學與嚴格的評價。
全站儀自由設站測量測站坐標采用基于CPIII“后方交會”網的方式,采用全站儀自由重疊設站[7]。該方法的基本原理與GPS相對定位的差分測量原理相似,即通過相鄰測站重疊觀測多個CPIII控制點獲得測站間的強相關性,從而削弱起算數據誤差對測站相對精度的影響,最終獲得極高的相鄰測站相對精度,然后采用普通的極坐標法測定軌道位置。
1.3 實例分析
下面以兩點后方交會來分析,已知控制點A(1)、B(2),測站點為P(0),通過邊角后方交會求測站點P的坐標。
1.3.1 基本計算公式
由圖1,利用3邊求解三角形,易計算待定點P的坐標[7]

圖1 全站儀自由設站

其中:

1.3.2 自由設站精度計算
對式(1)進行微分運算,得到

對式(2)和式(3)全微分并化簡得
計算P點在XY平面位置的中誤差σ2p=σ2x+σ2y為

由此可得

由此可見,全站儀自由設站測量時應盡量使每個控制點的位置相互間夾角在30°~150°之間,則所得到的站點坐標精度較高。若全站儀測距中誤差mD=2+2×S,測量距離取60m,此時站點位置中誤差近似為2,設站坐標滿足CPIII控制點的精度要求。
為了進一步提高精度,進行多余觀測,此時單位權中誤差[8]

其中:V為誤差向量,n為觀測數,t為必要觀測數量,P為權向量。

式中:σ20為任意選定的單位權中誤差,這里取1;σ2si為全站儀的標稱精度,則σ2si=a+b×[]si=2+2×s[i]。每次觀測時可認為各點觀測是等精度觀測,σs2i相等。取觀測數n為8,必要觀測數為2,代入式(10)中計算可得到σ20=1mm。
2 小車棱鏡點測量精度分析
小車棱鏡點測量分為棱鏡平面位置測量以及高程測量。在得到高精度的測站坐標與測站方位角的前提下,高精度測量小車棱鏡坐標是測量系統的主要目的。小車棱鏡測量結束應得到棱鏡坐標及其詳細精度信息,特別在軌道橫方向應當達到足夠高的精度。
2.1 棱鏡點平面位置測量基本計算
根據測量學原理和測量誤差傳播定律,用全站儀測量的平面位置點位中誤差計算公式為

式中:mp為點位中誤差,mx,my分別為縱、橫坐標中誤差,D為測站點至棱鏡點的距離,mD為距離觀測中誤差,mβ為測角中誤差。
需要指出的是:全站儀測角標定精度mO指的是一測回方向中誤差。而在利用TOPCON GPT-9001A進行軌道測量時,采用的是半測回測角的方法,所以,此時半測回測角中誤差,其中mb為半測回方向值的中誤差,且,所以mβ=2mO=2″。
取目標距離D=60m,將所有數據代入式(12),可得

即mp=2.2mm。
2.2 精調小車平面位置測量方法與精度計算
按平面位置測量基本計算可知,如果不在工程上采取一定的技術措施,全站儀平面位置測量的精度將無法滿足無碴軌道坐標測量的要求。
分析全站儀測量誤差的兩大因素:測角誤差和測距誤差。在測量時要求將全站儀盡可能架設在近似垂直于軌道橫斷面的直線上,即線路的行進方向,這一點在工程上很容易滿足。此時,由測角誤差和測距誤差兩大誤差因素產生的點位誤差可以分解為沿軌道行進方向(即儀器觀測方向)的縱向偏差(誤差)mD和軌道橫斷面方向的橫向偏差(誤差)mL,如圖2所示。
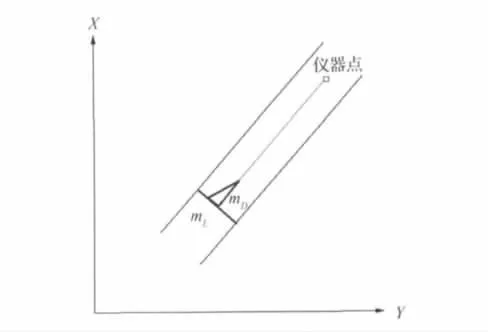
圖2 軌道測量誤差分解圖
按照文獻[5]中關于“軌道鋪設竣工測量成果表”的規定,由于縱向偏差mD只影響線路的里程(要考慮到mD也只有毫米級),其影響可以不予考慮;橫向偏差mL(即“軌道鋪設竣工測量成果表”中規定的線路橫向偏移)才是要考慮的主要誤差。此時,mp=mL。

即mp=0.6mm。
以上討論是基于儀器和觀測目標都不含對中誤差條件下成立。所以采用自由設站的方法以避免儀器對中誤差,對自由設站要觀測的已知點棱鏡采用強制對中的方法以避免棱鏡對中誤差,對軌檢小車的棱鏡也是采用強制對中的方法以避免棱鏡對中誤差,從而確保儀器和觀測目標都不含對中誤差。
考慮到軌檢小車內部誤差約為0.5mm,所以可以得到

結論:由理論分析可知,軌檢小車定位的最終點位平面位置精度為0.8mm(≤1.0mm)。
2.3 棱鏡點高程測量
根據測量學原理和測量誤差傳播定律,三角高程測量兩點高差的中誤差計算公式為

式中:SAB為A、B兩點間的距離,此處假設為60m,αA為在A點向B點測得的垂直角,此處假設為15°,iA為A點的儀器高,VB為B點的目標高,fAB為A、B兩點間的兩差(地球曲率差和大氣折射差)改正。
求微分,得其中誤差為

式中:mhAB為60m距離的測距中誤差,miA為儀器高量高中誤差,mVB為目標高量高誤差,mf為兩差改正中誤差。
結論:由理論分析可知,軌檢小車定位的最終點位高程精度為1.0mm(≤1.0mm)。
3 結束語
鐵路客運專線的測量工作具有技術新、標準嚴、精度高、范圍廣的特點。客運專線無碴軌道建設在我國是一個新的領域,測量系統是整個無碴軌道建設和運營管理的基礎,這個系統不僅包括昂貴的高精度測量儀器、高等級的控制網和高精度的施測技術,更為重要的是測量數據的基準、坐標體系、數據處理的技術水平、測量管理的模式和經驗。測量技術人員只有通過不斷學習新規范,掌握新技術,熟練操作新設備,才能在施工過程中把好質量關,保證客運專線的順利建設及運營后的行車安全。
[1]彭儀普,許曦,楊文雅.客運專線無碴軌道精密定軌測量技術研究[J].鐵道科學與工程學報,2007,4(6):78-82.
[2]李瑞林.無碴軌道控制測量技術[J].鐵道標準設計,2007(8):5-8.
[3]吳明友.客運專線無碴軌道鐵路工程測量和鋪設條件評估關鍵技術[J].中國鐵路,2006(10):28-31.
[4]王彬.鐵路無砟軌道精調測量的監理控制[J].建筑安全,2008(9):56-59.
[5]中華人民共和國鐵道部.TB10601-2009高速鐵路工程測量規范[S].北京:中國鐵道出版社,2009.
[6]萬斐.高速鐵路無碴軌道CPIII控制網測量方法研究[D].武漢:武漢大學,2008.
[7]周西振,尹任祥.測邊后方交會精度研究及其應用[J].西南交通大學學報,2006,41(3):344-348.
[8]蔡士毅,李博峰,石德斌,等.無碴軌道高速鐵路精密測量數據處理[J].大地測量與地球動力學,2008,28(1):114-117.
猜你喜歡
北京測繪(2020年12期)2020-12-29 01:37:18
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
工程與建設(2019年3期)2019-10-10 01:40:18
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
電測與儀表(2016年9期)2016-04-12 00:29:52
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
吉林地質(2014年3期)2014-03-11 16:47:31
河南科技(2014年22期)2014-02-27 14:18:08