基于FCD的旅行時間估計算法研究
2013-11-20 05:55:30李亞敏
交通運(yùn)輸研究 2013年8期
關(guān)鍵詞:模型
李亞敏
(交通運(yùn)輸部科學(xué)研究院,北京 100029)
0 引言
浮動車技術(shù)是目前國際上ITS領(lǐng)域中一種先進(jìn)的道路交通信息采集技術(shù)。利用浮動車進(jìn)行路段旅行時間數(shù)據(jù)的采集和預(yù)測,能夠在數(shù)據(jù)源上保證數(shù)據(jù)的精度和可靠性,提高數(shù)據(jù)的質(zhì)量。一方面,可以為用戶出行提供交通誘導(dǎo)服務(wù),合理地掌握出行時間,提高出行效率;另一方面,可以為交通管理部門提供數(shù)據(jù)支持,緩解交通壓力,提高行車速度。
1 浮動車技術(shù)
浮動車是指安裝有定位和無線通信裝置的普通車輛(如出租汽車、公交車、貨車、私人小汽車、警車等),這種車輛能夠與交通信息中心進(jìn)行信息交換。浮動車數(shù)據(jù)(Floating Car Data,以下簡稱“FCD”)一般包括時間、位置坐標(biāo)、瞬時速度、行駛方向、運(yùn)行狀態(tài)及其他內(nèi)容。浮動車技術(shù),是指一定數(shù)量的裝有特定車載設(shè)備的車輛(浮動車),在行駛過程中采集沿途的自身各種交通數(shù)據(jù)(如:速度、加速度、出行距離、出行時間、停車、超速、緊急情況等),所采集到的實時交通信息通過各種通訊手段傳送到信息中心,經(jīng)信息中心處理后,建立起龐大的共享數(shù)據(jù)庫,并向不同的對象提供多樣的實時交通信息。整個過程的實質(zhì)是對于整個路網(wǎng)的總體車輛進(jìn)行隨機(jī)抽樣,用樣本來反映總體的情況。基于FCD的旅行時間估計包括了浮動車數(shù)據(jù)采集、地圖匹配、數(shù)據(jù)預(yù)處理、預(yù)測估計四個步驟。
2 基于FCD的旅行時間估計模型建立
2.1 Kalman濾波模型的建立
浮動車數(shù)據(jù)可以獲得實時的路段旅行時間,在一定范圍內(nèi),路段旅行時間的序列具有自相關(guān)性,因此可以用過去幾個時段的路段旅行時間預(yù)測下一個時段的路段旅行時間。本模型考慮前n個時段路段的旅行時間對當(dāng)前時刻旅行時間的影響,用k,k-1,…,k-n+1時段的路段旅行時間預(yù)測k+1時段的路段旅行時間。
利用Kalman濾波理論,建立如下遞推方程組:

當(dāng)X(k)確定后,路段在下一個時段的旅行時間的預(yù)測值為:

式中,T(k+1)為預(yù)測的路段旅行時間;H0(k),H1(k),…,Hn-1(k)為參數(shù)矩陣;w(k)為觀測矩陣,假定為零均值的高斯白噪聲,其協(xié)方差矩陣為R(k);X(k)為狀態(tài)向量;y(k)為觀測向量;H(k)為觀測矩陣;A(k)為狀態(tài)轉(zhuǎn)移矩陣,A(k)=I;w(k-1)為模型噪聲,假定為零均值的高斯白噪聲,其協(xié)方差矩陣為Q(k-1);v(k)為觀測噪聲,假定為零均值的高斯白噪聲,其協(xié)方差矩陣為R(k)。由于本文選取的時間段比較短,前后相鄰兩個周期的交通狀態(tài)差別不是很大,所以A(k)取單位矩陣。R(k)、Q(k)、P0沒有先驗數(shù)據(jù),可設(shè)為單位矩陣。
算法流程如圖1所示。
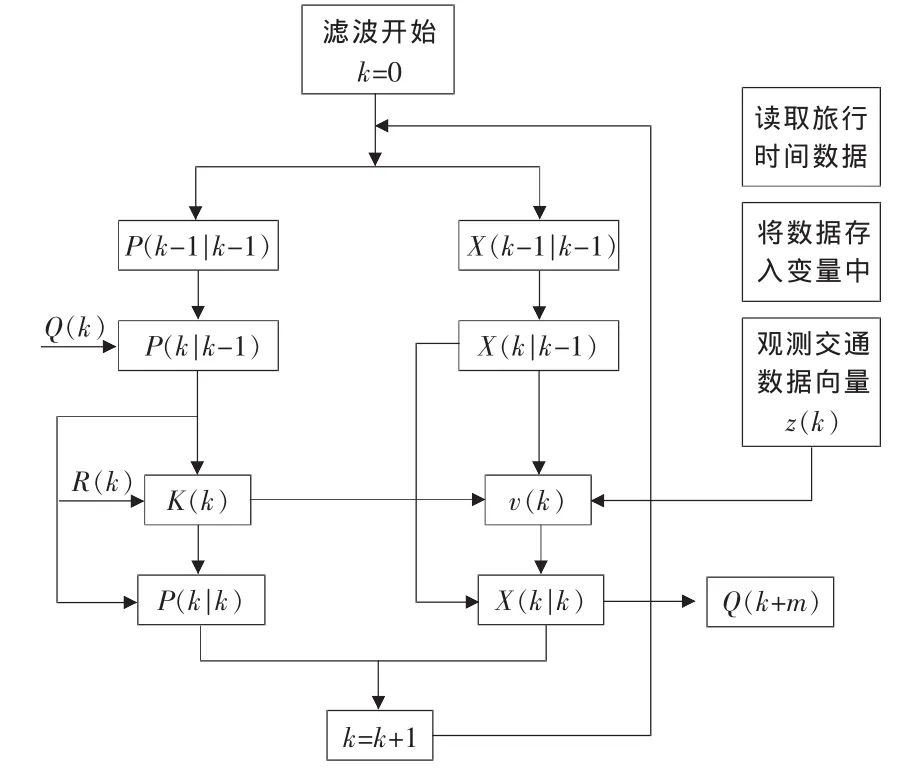
圖1 Kalman濾波算法流程
2.2 BP神經(jīng)網(wǎng)絡(luò)模型的建立
本文建立的BP神經(jīng)網(wǎng)絡(luò)的路段旅行時間預(yù)測模型,是基于研究路段及相關(guān)路段前幾個時段的平均旅行時間與研究路段下一個及以上時段的平均旅行時間的關(guān)系建立的。即輸入變量為研究路段及相關(guān)路段前幾個時段的平均旅行時間,輸出變量為研究路段下一個或一個以上時段的平均旅行時間,即達(dá)到預(yù)測目的。
根據(jù)得到的2007年6月7日的上海市浮動車所檢測到的旅行時間數(shù)據(jù),基于BP神經(jīng)網(wǎng)絡(luò),構(gòu)建旅行時間估計模型如圖2所示。

圖2 BP神經(jīng)網(wǎng)絡(luò)輸入輸出示意圖
模型中各變量意義如下:
t1(k),t2(k),…,tm(k),t(k)——相關(guān)路段及研究路段k時段的平均旅行時間;
w(k)——k時段神經(jīng)網(wǎng)絡(luò)學(xué)習(xí)權(quán)重矩陣,用來預(yù)測k+i時段的平均旅行時間。
3 實例分析
3.1 示例選取
為保證評估具有代表性和可操作性,挑選上海市內(nèi)的快速路、地面主干道和一條國道進(jìn)行:
a)快速路選取內(nèi)環(huán)高架從魯班路立交至漕溪北路匝道的雙向道路(單向約4.7km);
b)地面主干道選取中山南二路從魯班路至漕溪北路的雙向道路(單向約4.7km)(如圖3所示);
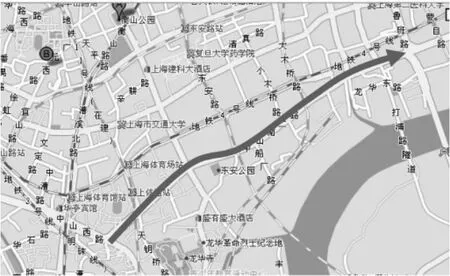
圖3 魯班路立交至漕溪北路匝道高架和地面主干道地圖
c)國道選取318國道(滬青平公路)從外環(huán)至趙巷鎮(zhèn)的雙向道路(單向約18km)。
取檢測周期為5min,平均速度為40km/h,道路覆蓋率達(dá)到65%的情況下計算各路段所需最小浮動車數(shù)量及誤差情況。選取2010年6月6日測量的中山南二路從魯班路至漕溪北路的西向東單向道路上的雙峰路—宛平南路路段進(jìn)行預(yù)測,時段為7:35~10:40(如圖4所示)。

圖4 預(yù)測路段(雙峰路—宛平南路)及上游相關(guān)路段
3.2 預(yù)測過程及結(jié)果分析
3.2.1 Kalman濾波模型預(yù)測
本節(jié)應(yīng)用建立的Kalman濾波模型,選取5min為一個時間間隔,預(yù)測下一個5min的路段旅行時間時,以k-1時段的路段旅行時間預(yù)測k時段的路段旅行時間。
圖5所示為預(yù)測結(jié)果與實際值的對比曲線。

圖5 基于FCD的路段旅行時間估計(Kalman濾波)
由圖5可以看出:
a)基于浮動車數(shù)據(jù),應(yīng)用Kalman濾波模型進(jìn)行路段短時預(yù)測可以取得較高的預(yù)測精度;
b)應(yīng)用Kalman濾波預(yù)測時,由于每次預(yù)測都是基于前一時段的旅行時間數(shù)據(jù),當(dāng)數(shù)據(jù)發(fā)生變化時,部分預(yù)測值與實際值相比較會出現(xiàn)一定的時滯現(xiàn)象;
c)相比而言,低峰時段的預(yù)測值較高峰時段的預(yù)測值更為準(zhǔn)確和平穩(wěn);
d)當(dāng)旅行時間實際值發(fā)生突變時,預(yù)測效果較差,由此可見,Kalman濾波模型在預(yù)測路段旅行時間時,如果出現(xiàn)由于交通事故或者天氣原因造成的突變,可能會有較大的預(yù)測誤差。
3.2.2 BP神經(jīng)網(wǎng)絡(luò)預(yù)測
本節(jié)應(yīng)用建立的BP神經(jīng)網(wǎng)絡(luò)模型,以5min為一個時間間隔,選取上游的龍華西路—天鑰橋路路段、天鑰橋路—雙峰路路段,以k-2,k-1,k時段的路段旅行時間分別預(yù)測k+1時段的路段旅行時間。
圖6所示為預(yù)測數(shù)據(jù)與實際值的對比曲線。
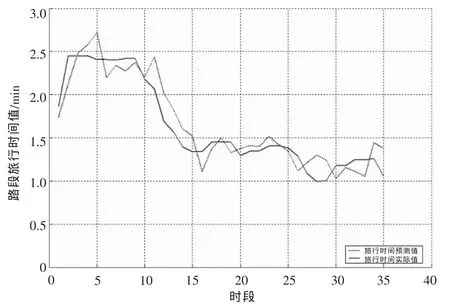
圖6 基于FCD的路段旅行時間估計(BP神經(jīng)網(wǎng)絡(luò))
由圖6可以看出:
a)基于浮動車數(shù)據(jù),應(yīng)用BP神經(jīng)網(wǎng)絡(luò)模型進(jìn)行路段短時預(yù)測可以得到較高的精度,與實際的旅行時間可以較好吻合;
b)應(yīng)用BP神經(jīng)網(wǎng)絡(luò)預(yù)測時,在高峰時段預(yù)測效果較差,且數(shù)據(jù)有時會發(fā)生一定的突變,而且每次初始化網(wǎng)絡(luò)時都是隨機(jī)的,而且訓(xùn)練終止時的誤差也不完全相同,結(jié)果訓(xùn)練后的權(quán)植和閥也不完全相同,所以訓(xùn)練后的結(jié)果也不同,數(shù)據(jù)的準(zhǔn)確度也會有差別;
c)當(dāng)實際值變化不大時,除個別時段外,預(yù)測效果普遍較好;當(dāng)時實際值變化較大時,預(yù)測效果變差。
在實際應(yīng)用中,應(yīng)用BP神經(jīng)網(wǎng)絡(luò)進(jìn)行旅行時間預(yù)測還存在以下問題:
a)收斂速度慢;
b)學(xué)習(xí)不穩(wěn)定,容易陷入局部極小點(diǎn),網(wǎng)絡(luò)的學(xué)習(xí)時間和學(xué)習(xí)效果受初始狀態(tài)影響,而初始狀態(tài)的選擇在BP神經(jīng)網(wǎng)絡(luò)中是隨機(jī)的,仿真試驗可以多次運(yùn)行尋找滿意解,可是實際預(yù)測不太可能提供足夠的時間來尋求滿意解,這就造成了實際預(yù)測結(jié)果的不穩(wěn)定;
c)雖然預(yù)測趨勢大體吻合,但是在某些預(yù)測位置點(diǎn)存在預(yù)測延遲現(xiàn)象,很難對一些突變點(diǎn)進(jìn)行預(yù)測。
3.3 誤差分析
3.3.1 定義誤差指標(biāo)
對預(yù)測結(jié)果進(jìn)行誤差分析,各誤差指標(biāo)定義如下。
3.3.1.1 平均誤差(AE)

式中,xi為實際值;x*i為預(yù)測值。
3.3.1.2 平均絕對誤差(MAE)

3.3.1.3 平均百分比絕對誤差(MAPE)
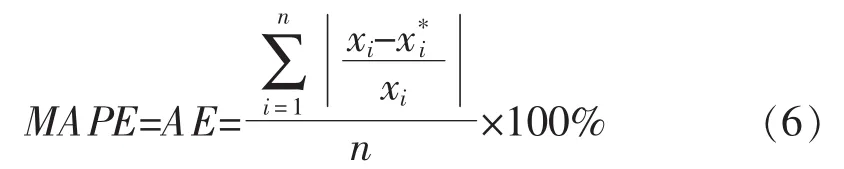
3.3.1.4 均方根誤差或標(biāo)準(zhǔn)誤差(RMSE)

3.3.2 預(yù)測結(jié)果誤差指標(biāo)值及分析
利用誤差指標(biāo),對兩種模型預(yù)測出的結(jié)果與真實值作比較,計算誤差結(jié)果見表1、圖7。

表1 旅行時間估計結(jié)果誤差指標(biāo)對比表

圖7 旅行時間估計結(jié)果誤差指標(biāo)對比圖
由表1可以看出,利用Kalman濾波模型與BP神經(jīng)網(wǎng)絡(luò)分別進(jìn)行旅行時間估計,其各項誤差指標(biāo)均在可接受的范圍內(nèi),說明基于浮動車數(shù)據(jù)利用這兩種預(yù)測方法進(jìn)行預(yù)測是可行的。
比較兩種模型的各項指標(biāo)可得,利用Kalman濾波模型對路段短時旅行時間進(jìn)行預(yù)測比利用BP神經(jīng)網(wǎng)絡(luò)模型進(jìn)行預(yù)測的預(yù)測精度更高。說明進(jìn)行短時旅行時間估計時,Kalman濾波方法適用性更好。根據(jù)Kalman濾波的工作原理,每一步都要進(jìn)行增益矩陣和觀測矩陣的調(diào)整,而這些調(diào)整都是以誤差為基礎(chǔ)的,除了時間分量以外,以往的研究所采用的速度、車流量、車道占有率等數(shù)據(jù)的波動一般較大,將其引入狀態(tài)向量中必然會引起大幅震蕩,導(dǎo)致矩陣有大的調(diào)整,易使預(yù)測結(jié)果發(fā)生大的偏差,導(dǎo)致預(yù)測精度差。采用浮動車數(shù)據(jù),可以方便地獲取路段旅行時間實際值,數(shù)據(jù)的變化較為平穩(wěn),容易得到較好的預(yù)測精度。
4 結(jié)語
本文根據(jù)Kalman濾波模型以及BP神經(jīng)網(wǎng)絡(luò)的優(yōu)點(diǎn),選取了以上兩種模型進(jìn)行旅行時間估計。通過建立符合浮動車數(shù)據(jù)特點(diǎn)的相應(yīng)的模型算法,選取合適的參數(shù)進(jìn)行定量的計算預(yù)測。比較最后的預(yù)測結(jié)果圖,相對于BP神經(jīng)網(wǎng)絡(luò)模型,Kalman濾波模型的預(yù)測值與真實值更加吻合,波動也較小;通過誤差指標(biāo)比較圖和比較表可看出,從整體來看,Kalman濾波模型的各項誤差指標(biāo)均小于1且遠(yuǎn)小于BP神經(jīng)網(wǎng)絡(luò)的誤差,可以得到比BP神經(jīng)網(wǎng)絡(luò)更為接近實際的預(yù)測值。由于Kalman濾波本身的動態(tài)性、實時性、可操作性強(qiáng)、計算量少的優(yōu)點(diǎn),且其模型的遞推形式有利于計算機(jī)編程的實現(xiàn),算法的實時性也滿足實際預(yù)測系統(tǒng)的要求,可應(yīng)用于基于FCD的路段旅行時間短時預(yù)測及相關(guān)的交通智能控制系統(tǒng)。
[1]秦嶺,張劍飛,郭鵬,等.浮動車交通信息采集與處理關(guān)鍵技術(shù)及其應(yīng)用研究[J].交通運(yùn)輸系統(tǒng)工程與信息,2007,(1):39-42.
[2]楊兆升.關(guān)于智能運(yùn)輸系統(tǒng)的關(guān)鍵理論——綜合路段行程時間預(yù)測的研究[J].交通運(yùn)輸工程學(xué)報,2003,(1): 65-67.
[3]杭明升,楊曉光,彭國雄.基于卡爾曼濾波的高速道路行程時間動態(tài)預(yù)測[J].同濟(jì)大學(xué)學(xué)報:自然科學(xué)版,2002,(9):1068-1072.
[4]楊兆升,孫喜梅.實時動態(tài)路段旅行時間預(yù)側(cè)的一種實用方法[J].公路交通科技,2001,(2):44-65.
[5]Christian E Dunkerley.The effect of disruptions on travel times:a regression analysis from Colombia[DB/OL].http://www.iasi.cnr.it/ewgt/13conference/74_dunkerley.pdf,2008-05-20.
[6]王均,關(guān)偉.基于Kalman濾波的城市環(huán)路交通流短時預(yù)測研究[J].交通與計算機(jī),2006,(5):16-19
[7]Turner S M,Holdener D J.Probe Vehicle Sample Size for Real-Time Information:The Houston Experience[R].New York:Vehicle Navigation and Information System(VNIS)Conf.IEEE,1995.
[8]董敬欣.基于GPS/GIS的浮動車技術(shù)在城市路網(wǎng)分析與評價中的相關(guān)方法及應(yīng)用研究[D].北京:北京交通大學(xué),2005.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導(dǎo)航定位學(xué)報(2022年4期)2022-08-15 08:27:00
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀(jì)智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學(xué)院學(xué)報(2021年2期)2021-07-19 08:35:14
新世紀(jì)智能(數(shù)學(xué)備考)(2020年9期)2021-01-04 00:25:14
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
