回轉(zhuǎn)誤差測試中主軸旋轉(zhuǎn)方向與傳感器相互位置關(guān)系的判定研究*
2013-09-27 01:30:56馬曉波劉啟偉張耀滿
制造技術(shù)與機床 2013年8期
馬曉波 劉啟偉 張耀滿
(①沈陽機床(集團)有限責(zé)任公司高檔數(shù)控機床國家重點實驗室,遼寧沈陽 110142;②東北大學(xué)機械工程與自動化學(xué)院,遼寧沈陽 110004)
機床主軸回轉(zhuǎn)誤差運動是指在主軸回轉(zhuǎn)過程中回 轉(zhuǎn)軸線偏離理想軸線位置而出現(xiàn)的附加運動,是影響機床加工精度的主要因素,是衡量機械系統(tǒng)性能、評價機床動態(tài)特性的一項重要指標(biāo)[1-2]。造成機床主軸回轉(zhuǎn)誤差的原因有主軸傳動系統(tǒng)的幾何誤差、傳動軸偏心、慣性力變形、熱變形等誤差,也包括許多隨機誤差。
通過徑向跳動量和軸向竄動量測試實驗可以有效地滿足對回轉(zhuǎn)精度測量的要求,對測試數(shù)據(jù)的進一步分析,則是了解回轉(zhuǎn)軸的運動狀態(tài)和判斷產(chǎn)生誤差運動原因的必要手段。在主軸回轉(zhuǎn)誤差分析中,主軸的旋轉(zhuǎn)方向與徑向上兩個位移傳感器的位置關(guān)系往往被忽略,即使考慮到這一因素一般也是采用人工記錄的方式,其可靠性和便利性受到一定的影響,對測試數(shù)據(jù)的后續(xù)分析處理帶來了很多不便。
本文在對主軸回轉(zhuǎn)誤差測試模型分析的基礎(chǔ)上,探討了一種自動分析判定主軸旋轉(zhuǎn)方向與徑向傳感器位置相互關(guān)系的方法,經(jīng)過適當(dāng)簡化得到了很好的應(yīng)用效果。
1 旋轉(zhuǎn)方向?qū)剞D(zhuǎn)誤差的影響分析
理想的機床主軸只有一個旋轉(zhuǎn)自由度,沿其他方向的運動均被視為誤差運動或?qū)ν獠孔饔玫姆答佇袨椋?-4]。回轉(zhuǎn)誤差運動一般可以分為3種基本形式:(1)與回轉(zhuǎn)軸線平行的徑向位移(純徑向跳動);(2)與回轉(zhuǎn)軸線平行的軸向位移(純軸向竄動);(3)傾斜(純角度擺動)。
一般情況下,這3種基本形式的誤差是同時存在的,產(chǎn)生的加工誤差也是這3種形式誤差影響的疊加。
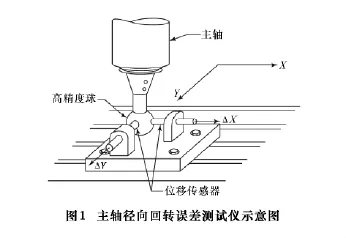
徑向誤差的大小取決于測量頭的軸向位置,軸向誤差的大小取決于測量頭在測量平面上的徑向位置。因此應(yīng)盡量減小安裝誤差以提高測試精度。一般主軸的徑向回轉(zhuǎn)誤差采用如圖1所示的測試儀器。
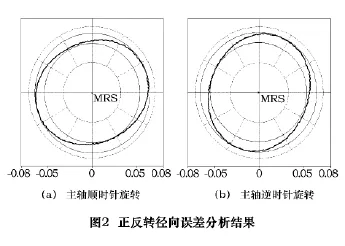
對于一組測試數(shù)據(jù),主軸的旋轉(zhuǎn)方向不會影響分析的數(shù)值結(jié)果,如同步誤差、非同步誤差和總誤差等,但會影響誤差的圖形特性。圖2是同一測試數(shù)據(jù)考慮主軸旋轉(zhuǎn)方向后徑向同步誤差的分析結(jié)果,圖2a認(rèn)為主軸順時針旋轉(zhuǎn),圖2b認(rèn)為主軸逆時針旋轉(zhuǎn)。可見,在考慮主軸回轉(zhuǎn)方向后,在主軸起始角度不為零的情況下,主軸徑向回轉(zhuǎn)誤差的分析結(jié)果雖然形狀不變,但相位角卻發(fā)生了變化,在精確分析和誤差溯源中這是值得考慮的因素。
2 旋轉(zhuǎn)方向的判定
為了簡化分析模型,首先以主軸只具有安裝偏心情況為例,分析回轉(zhuǎn)誤差測試結(jié)果。設(shè)主軸安裝偏心量為a、b,測試心棒半徑為r,測試示意圖如圖3所示。
其中:O為理想主軸中心位置;O′為安裝偏心位置;α為起始角,主軸初始位置時OO′與X軸的夾角;S1、S2為位移傳感器。
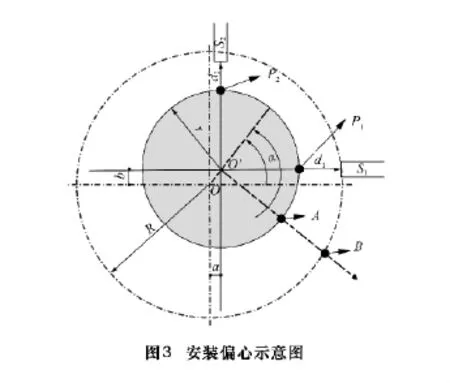
主軸逆時針旋轉(zhuǎn)時,相當(dāng)于主軸不動傳感器S1和S2以O(shè)為圓心作順時針旋轉(zhuǎn);主軸順時針旋轉(zhuǎn)時,相當(dāng)于主軸不動傳感器S1和S2以O(shè)為圓心作逆時針旋轉(zhuǎn)。現(xiàn)以S1傳感器為例,圖中虛線外圓為S1傳感器相對于主軸的相對運動軌跡,其測量結(jié)果即為以O(shè)′為起點的射線與虛線外圓和主軸外圓的交點間的距離,即AB線段長度。
以O(shè)′為圓心,主軸外圓和虛線外圓的直角坐標(biāo)方程分別為:
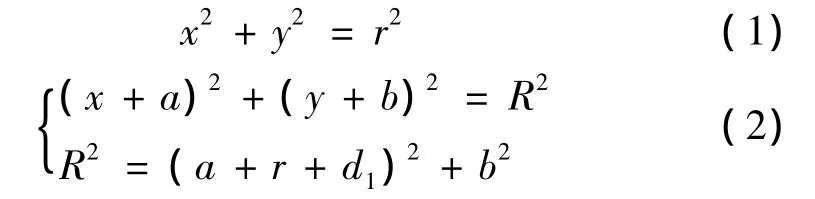
將式(1)、(2)變換為極坐標(biāo)方程分別為:
由式(4)求得:
對上式求導(dǎo),得

考慮公式(5),所以在式(9)中,有

即式(9)的符號與K無關(guān),也就是與d1無關(guān)。
令S1傳感器測量結(jié)果所形成的曲線為S1曲線,S2傳感器測量結(jié)果所形成的曲線為S2曲線。則S1曲線的單調(diào)區(qū)間判別函數(shù)可簡化為:

同法,可以求得S2曲線的單調(diào)區(qū)間判別函數(shù)。另外,S1和S2傳感器的安裝位置相差90°,因而可以很容易得到S2曲線的單調(diào)區(qū)間判別函數(shù)。當(dāng)主軸順時針旋轉(zhuǎn)時,傳感器S2的單調(diào)區(qū)間判別函數(shù)為

當(dāng)主軸逆時針旋轉(zhuǎn)時,傳感器S2的單調(diào)區(qū)間判別函數(shù)為

根據(jù)式(11)、(12)和(13),以 45°為一個區(qū)間,將主軸一個回轉(zhuǎn)周期分為8個區(qū)域,計算3條曲線的單調(diào)區(qū)間,計算結(jié)果見表1示。
由于測試過程的連續(xù)性,表1中的角度是一個從0到360°的往復(fù)過程,因此從表1可以提取出表2所示連續(xù)數(shù)據(jù)。
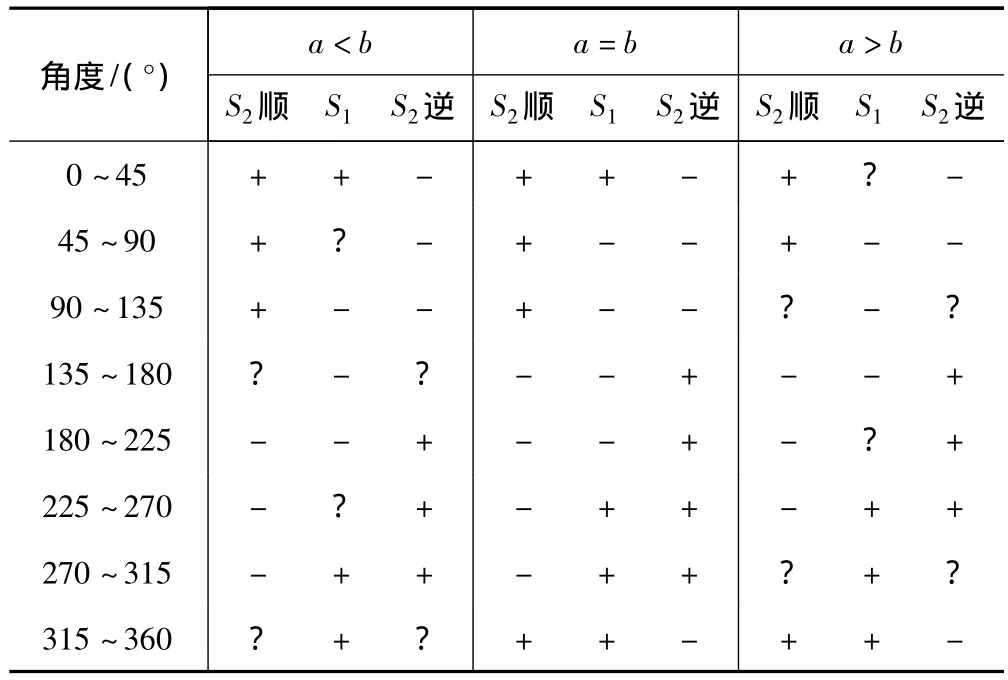
表1 曲線單調(diào)區(qū)間
從表2可以歸納出如下結(jié)論:
無論a、b大小關(guān)系如何,主軸順時針旋轉(zhuǎn)時,當(dāng)S1曲線和S2曲線都進入單調(diào)遞增區(qū)間后,S1曲線先進入單調(diào)遞減區(qū)間;主軸逆時針旋轉(zhuǎn)時,當(dāng)S1曲線和S2曲線都進入單調(diào)遞增區(qū)間后,S2曲線先進入單調(diào)遞減區(qū)間。
以上推導(dǎo)過程假設(shè)主軸檢棒沒有圓度誤差,但考慮到在實際的測試中使用高精度的球頭檢棒,一般地,相對于主軸的回轉(zhuǎn)誤差來說其圓度誤差可以忽略不計,因而以上推導(dǎo)過程是成立的。
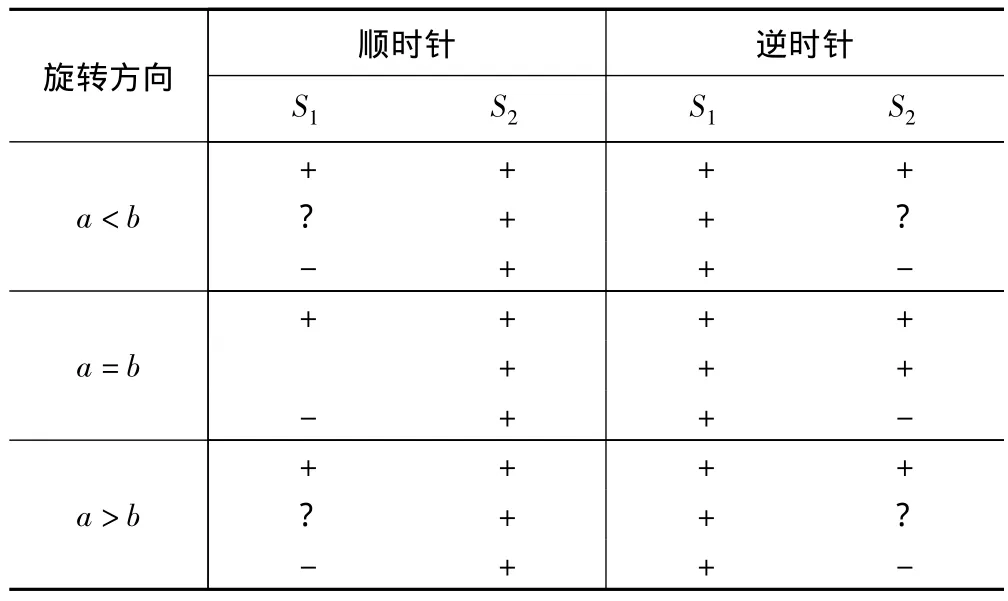
表2 關(guān)鍵數(shù)據(jù)點
在主軸回轉(zhuǎn)誤差的3種基本形式中,主軸的軸向竄動對上述分析沒有影響,而主軸的安裝傾角理論上只是增大主軸的回轉(zhuǎn)半徑,因此以上結(jié)論同樣適合于主軸有安裝傾角以及不同形式誤差的疊加狀態(tài)。
據(jù)此,可以通過主軸回轉(zhuǎn)誤差測試中兩個徑向位移傳感器測量結(jié)果的單調(diào)性變動情況來判定主軸的回轉(zhuǎn)方向。
3 試驗驗證
由于a、b變量的存在,以及a、b變量隨主軸旋轉(zhuǎn)位置的變動而產(chǎn)生變化的情況,直接通過判別函數(shù)式(11)、(12)或(13)來判斷主軸的旋轉(zhuǎn)方向是不可能的,因此在實際的應(yīng)用中采用適合計算機處理的方法。首先將S1和S2曲線展開,然后畫一條與S1和S2曲線都相交的直線,一般取S1曲線的算術(shù)平均值或有效值作為直線的初始值,如圖4所示。
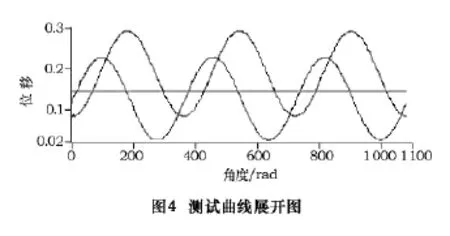
從起點出發(fā),沿曲線向右移動,當(dāng)兩條曲線都位于直線上方時,令先下降與直線相交的曲線所對應(yīng)的傳感器為Sa傳感器,另一個為Sb傳感器,則主軸旋轉(zhuǎn)方向為Sa經(jīng)劣弧至Sb。若直線只和其中一個相交時,可以上下平移直線,直到滿足要求為止。
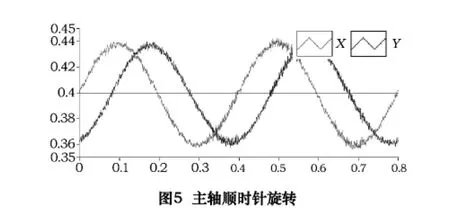
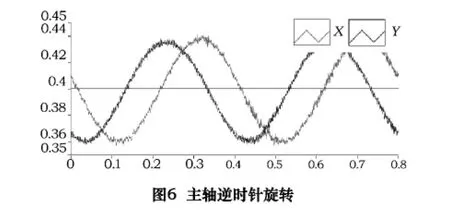
圖5和圖6是同一次主軸回轉(zhuǎn)誤差測試中在1 500 r/min時主軸正反轉(zhuǎn)的測試結(jié)果,測試過程中主軸徑向傳感器的位置始終保持不變。根據(jù)本文提出的旋轉(zhuǎn)方向的判定準(zhǔn)則,圖5中主軸旋轉(zhuǎn)方向為由X向Y,而圖6中主軸的旋轉(zhuǎn)方向為由Y至X,分析結(jié)果與實際的主軸旋轉(zhuǎn)方向一致。
在實際應(yīng)用中,由于測試儀器的安裝誤差和噪聲等干擾信號的存在[5],在分析主軸旋轉(zhuǎn)方向前可對測量數(shù)據(jù)進行低通濾波或平滑處理。同時,在對比數(shù)據(jù)時需要設(shè)定一個閾值,當(dāng)對比狀態(tài)連續(xù)次數(shù)超過閾值時,才能認(rèn)為此狀態(tài)是有效的,以提高判定的穩(wěn)定性。為了驗證以上分析結(jié)果,編制了主軸回轉(zhuǎn)誤差分析程序,流程圖如圖7所示。
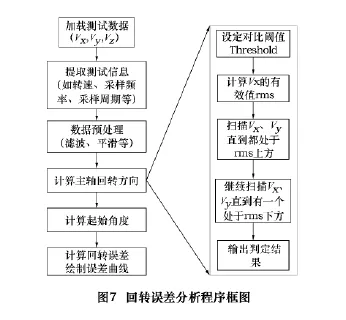
通過實際檢驗,證明此方法準(zhǔn)確、計算速度快,適合自動化分析。
4 結(jié)語
減少人為干預(yù)、提高測試和分析的自動化程度以及分析的深度是提高可靠性和工作效率的有效手段。本文由簡入繁推導(dǎo)了回轉(zhuǎn)誤差分析中主軸旋轉(zhuǎn)方向的判別準(zhǔn)則,然后又由繁入簡提供了簡單有效的判定方法,為主軸回轉(zhuǎn)誤差分析中回轉(zhuǎn)方向的自動判定提供了有效的解決途徑。
[1]Drew Devitt.Axis of rotation metrology[EB/OL].www.powertransmission.com,2009.
[2]Hii King-Fu,Ryan Vallance R,Grejda Robert D,et al.Error motion of a kinematic spindle[EB/OL].http://www.sciencedirect.com,2004.
[3]Bob Grejda,Byron Knapp.Axis of rotation metrology tutorial[EB/OL].http://www.lionprecision.com,2001.
[4]Marsh Eric R.Precision spindle metrology[EB/OL].http://www.lionprecision.com.2001.
[5]蘇恒,洪邁生,魏元雷,等.機床主軸徑向誤差運動在線檢測與信號處理[J].機械工程學(xué)報,2002,38(6):56-60.
猜你喜歡
計算機應(yīng)用(2022年2期)2022-03-01 12:33:42
計算機應(yīng)用(2022年1期)2022-02-26 06:57:42
計算機應(yīng)用(2021年4期)2021-04-20 14:06:36
計算機應(yīng)用(2021年3期)2021-03-18 13:44:48
民用飛機設(shè)計與研究(2020年4期)2021-01-21 09:15:02
計算機應(yīng)用(2021年1期)2021-01-21 03:22:38
電子制作(2018年18期)2018-11-14 01:48:24
山東工業(yè)技術(shù)(2016年15期)2016-12-01 05:31:22
小天使·一年級語數(shù)英綜合(2015年2期)2015-01-14 06:35:05
中國中醫(yī)藥現(xiàn)代遠程教育(2014年11期)2014-08-08 13:23:44
