基于圖像識別的尋跡智能車設計
2013-08-01 11:37:48陳孟元孫書誠
重慶理工大學學報(自然科學) 2013年3期
陳孟元,孫書誠,王 虎
(安徽工程大學安徽省電氣傳動與控制重點實驗室,安徽蕪湖241000)
尋跡是機器人自主運動的關鍵技術之一,在現(xiàn)有的多種導航方式中,視覺導航是穩(wěn)定性較好的方案之一[1]。本文研究對象為一個標準汽車模型,通過車載CMOS攝像頭動態(tài)獲取路面圖像,在一個具有特定幾何尺寸約束、摩擦因數(shù)及光學特性的白色KT板上,利用轉向和車速控制,使智能車自動沿著其中心鋪設的黑色帶狀引導線行駛,在保證穩(wěn)定性的前提下以最短時間完成尋跡任務。
在路徑的識別方面,一般只考慮均勻光照情況,忽視光照強弱對圖像采集的影響(光照原因造成的圖像信息的丟失會降低智能車判斷路徑的準確率)[2]。本文在圖像處理中改進邊緣檢測算法,使用動態(tài)閾值提高圖像的區(qū)分度,提升了智能車在前行過程中因光照強度不均勻引起的圖像特征提取準確度問題。
1 尋跡智能車硬件設計
尋跡智能車以飛思卡爾公司的MC9S12XS128微處理器為控制核心[3],硬件包括電源管理模塊、CMOS攝像頭、舵機轉向模塊、電機驅動模塊、轉向/行走電機和車速檢測模塊、PC機調試模板等,其中上位機調試模板通過ZigBee無線通信模塊與PC機通訊,結合基于VC環(huán)境開發(fā)的應用軟件實現(xiàn)在線綜合調試和分析功能。智能車系統(tǒng)總體結構框圖[4]如圖1所示。
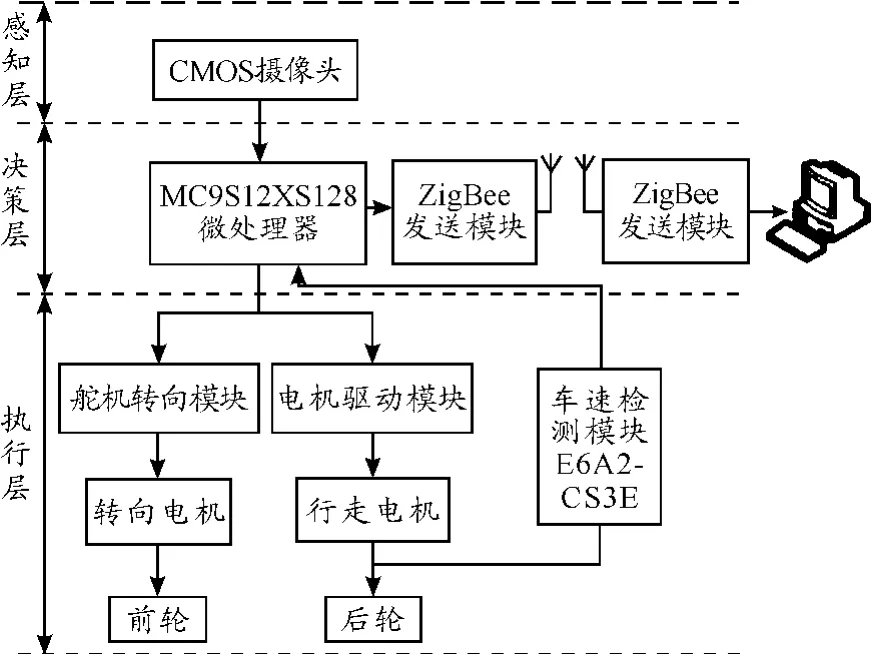
圖1 智能車系統(tǒng)總體結構框圖
智能車采用MC9S12XS128微處理器作為系統(tǒng)的控制核心,它負責控制各個模塊間的協(xié)調工作,接收來自CMOS攝像頭采集的路況信息和速度檢測模塊反饋的速度信息,采用邊緣檢測算法對這些信息進行處理,形成合適的控制量對轉向/行走電機進行控制,保證智能車快速穩(wěn)定地沿指定路徑行駛;同時通過異步串口(SCI)把智能車行駛過程中的關鍵參數(shù)應用ZigBee無線通信動技術發(fā)送到PC機以便實時分析。
智能車系統(tǒng)采用標準車模7.2 V 2 000 mAh Ni-Cd充電電池進行供電,電機驅動模塊可以用7.2 V充電電池直接供電,CMOS攝像頭、微處理器、舵機和編碼器等模塊通過LM2940穩(wěn)壓芯片將7.2 V電壓轉換成穩(wěn)定的5 V電壓。
路徑信息采集模塊主要負責采集智能車所處位置的路況信息,輸出相應的信號供微處理器處理。選擇基于 CMOS傳感器的數(shù)字攝像頭OV6620,采用邊緣檢測算法對其采集到的路面信息進行處理,以達到良好的路徑信息采集效果。
由于路徑情況復雜,智能車需要不停地調整轉向以適應跑道的變化。舵機轉向模塊為智能車方向控制執(zhí)行機構。微處理器通過對攝像頭采集的路況信息進行分析處理,針對不同的采集信號對轉向電機進行相應的控制,實現(xiàn)相應的轉彎要求,從而保證智能車沿跑道準確行駛。
電機驅動模塊作為控制行走電機轉速的執(zhí)行機構,要求能有很好的加速和制動性能。智能車的電機驅動是利用兩片半橋驅動芯片BST7960構成的H橋式驅動電路,為了實現(xiàn)直流電機的調速采用PWM波對智能車進行控制調速。
采用歐姆龍E6A2-CS3E光電編碼器對智能車當前速度進行檢測,反饋傳至微處理器,通過各種智能算法實現(xiàn)速度的閉環(huán)控制。
按照以上設計方案研制的尋跡智能車如圖2所示。
2 尋跡智能車圖像處理
在光線強度不均勻的情況下使用二值法算法處理圖像時,二值化閾值很難確定,且當光線有較小變化時,圖像就無法識別引導線[5]。直接邊緣檢測算法適合光線變化較弱的情況,當光線變化較強時,圖像像素的灰度值不呈線性變化,這時此種算法不能清晰分辨圖像引導線。本次設計改進了邊緣檢測算法,用動態(tài)閾值替代之前的靜態(tài)閾值。動態(tài)閾值計算如式(1)所示[6]。
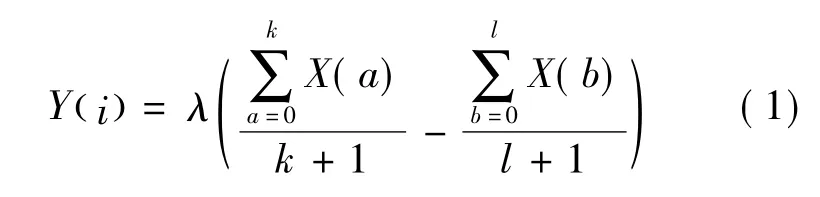
式中:Y(i)是第i行計算的動態(tài)閾值;X(a)、X(b)分別為第i行白色和黑色像素點的灰度值;λ為取值在0.7~1.0的閾值系數(shù)。將k行的所有白色像素點和l行的所有黑色像素點的灰度值求取幾何平均,再將2個平均值相減作為下一行的閾值。由于不同的場合光線強度不同,從而閾值也不一樣。采用動態(tài)閾值可使得每行的閾值過渡自然,可更有效地準確提取圖像中的引導線[7]。
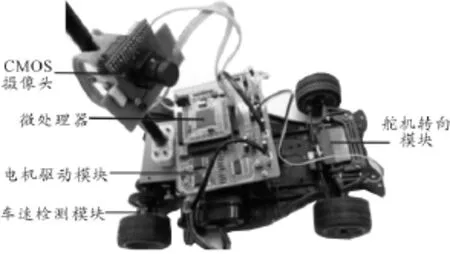
圖2 智能車實物
智能車跑道一般由直道、直角彎道與S型彎道組成,如圖3 所示[8-9]。
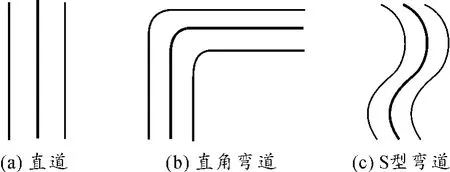
圖3 路徑類型
圖4(a)、5(a)、6(a)是采集的實際圖像,中間陰影部分為圖像中黑色引導線,亮處為干擾光斑;圖4(b)、5(b)、6(b)是直接邊緣檢測的處理圖像;圖4(c)、5(c)、6(c)是改進后的邊緣檢測的處理圖像。通過圖4~6中比較可以看出,當光線強烈改變時,直接邊緣檢測算法就無法分辨出黑線,而改進后的邊緣檢測則能適應光線的改變,區(qū)分出道路中的黑線。
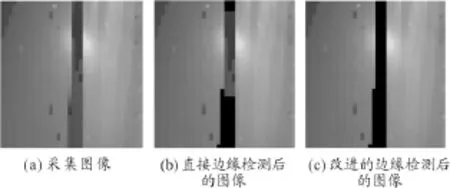
圖4 直道圖像處理前后的對比
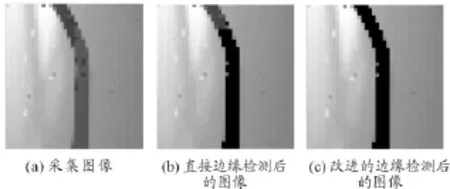
圖5 直角彎道圖像處理前后的對比
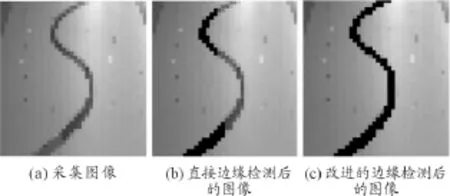
圖6 S型彎道圖像處理前后的對比
3 實驗方案和分析
實驗參數(shù)測量示意圖如圖7所示,智能車的幾何中心為示意圖B點所在直線,道路的中心為A點所在直線,其中路徑寬度為50 cm,中間黑色引導線寬度為2.5 cm,智能車為示意圖中的方塊,攝像頭視野為虛線梯形所示范圍,圖像距車近端視野寬度是24 cm,最遠端視野寬度是30 cm。選取圖像中的某一行,測出視野最左端至視野中心(即車的幾何中心)的距離m,測出視野最左端至黑線中心(即道路)的距離n。x(x=|n-m|)為按比例還原后得到的實際偏差。
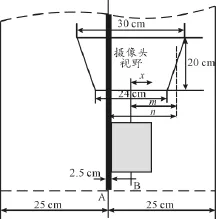
圖7 實驗參數(shù)測量示意圖
經(jīng)實驗測試可知,智能車的最高速度可以達到3.5 m/s。為了獲取更穩(wěn)定的參數(shù),設置智能車以 0.8 m/s、1.2 m/s和 1.6 m/s三種速度運行,并分別對直道、直角彎道和S型彎道3種道路類型的偏差進行記錄。偏差經(jīng)過計算得到均值和方差,均值反映了智能車偏離黑線中心的遠近,方差反映了智能車運行的穩(wěn)定狀態(tài)。
尋跡智能車在均勻光照情況下分別按照直接采集的圖像和經(jīng)過改進邊緣檢測算法處理后的圖像行駛,獲得的實驗數(shù)據(jù)如表1和表2所示。

表1 尋跡智能車均勻光照情況下采集圖像的跟蹤誤差

表2 尋跡智能車均勻光照情況下采集圖像經(jīng)改進邊緣檢測算法處理后的跟蹤誤差
由表1分析可知,當智能車以0.8 m/s速度行駛時,偏離道路中心位置少,運行的狀態(tài)穩(wěn)定,各種道路類型均可穩(wěn)定運行;當智能車以1.6 m/s速度行駛時,在直線型的道路上行駛,偏離道路中心仍然較少,能保持良好的運行狀態(tài),但在直角彎道和S型彎道時,其偏離中心較多,跟蹤誤差較大。在速度相同時,通過比較智能車行駛的偏差均值可知,直角彎道和S型彎道時偏差較大。為了減小這2種道路類型時的偏差,需對智能車進行預測控制,使智能車提前轉彎。比較智能車行駛時的方差可知,彎道的方差較大,反應了智能車運行狀態(tài)變化較快,產生了一定的振蕩。針對這種情況,對某些彎道進行直線化處理,即當攝像頭檢測并判斷出當前路徑為直角彎道時,尋跡智能車應適當減速并沿著彎道內側前行以保證智能車所走的路程最短且增強了穩(wěn)定性;當攝像頭檢測并判斷出當前路徑為S型彎道時,尋跡智能車應沿著S型彎道的中心直線前行。智能車在不同路徑類型的規(guī)劃行走路線如圖8所示[10]。
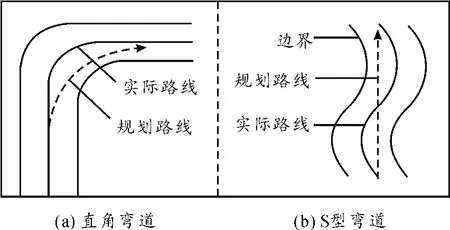
圖8 智能車規(guī)劃行走路線
同時,對比表1和表2可知,以直角彎道為例,按照直接采集圖像行駛方案,0.8 m/s、1.2 m/s和1.6 m/s速度時的路徑偏差均方差分別為:11.666 7、20.166 7、26.000 0;按照改進邊緣檢測算法處理后的圖像行駛方案路徑偏差均方差分別為:7.666 7、12.666 7、16.833 3,穩(wěn)定性分別提高了34.2%、37.2%和35.3%。由此可見,在相同道路類型和速度下,按照改進邊緣檢測算法處理后的圖像行駛的尋跡智能車均比按照直接采集圖像行駛的均方差小,穩(wěn)定性好。
尋跡智能車在光線強度不同情況下分別按照直接邊緣檢測算法與改進邊緣檢測算法處理后的圖像行駛,獲得的實驗數(shù)據(jù)如表3和表4所示。
對比表3和表4可知,在相同的道路類型和速度情況下,表4中的各項數(shù)據(jù)均優(yōu)于表3。這表明,當有外來光線影響時,尋跡智能車采用直接邊緣檢測算法后可以沿著指定路徑行駛,但偏離黑色中心線較遠,穩(wěn)定性較差;在采用改進邊緣檢測算法后,智能車行駛時接近黑色中心線,穩(wěn)定性有所提高,接近于表2所示的誤差水平,表明通過使用改進后的邊緣檢測算法,能解決圖像在光照強度不同的情況下引起較大誤差的問題,提高了尋跡智能車的穩(wěn)定性。

表3 尋跡智能車在光線強度不同情況下經(jīng)直接邊緣檢測算法處理后的跟蹤誤差

表4 尋跡智能車在光線強度不同情況下經(jīng)改進邊緣檢測算法處理后的跟蹤誤差
4 結束語
實驗結果表明,采用MC9S12XS128單片機作為控制核心,CMOS攝像頭作為路徑識別的傳感器,可以充分利用模糊自適應PI控制實現(xiàn)模糊控制算法,具有較好的前瞻性,同時,根據(jù)道路的不同類型采用不同的控制參數(shù),對智能車尋跡起到一個良好的預判作用,使智能車能夠平滑地沿引導線行駛。
在圖象處理方面,通過在均勻光照與光線強度不同的兩種情況下對尋跡智能車分別按照直接采集圖像、直接邊緣檢測算法與改進邊緣檢測算法處理后的圖像行駛的誤差進行對比,發(fā)現(xiàn)使用改進的邊緣檢測算法能很好地解決圖像受光線影響的問題,提高了整個智能車的抗干擾能力,使智能車的平均速度由原來的1.4 m/s提高到2.1 m/s。
[1]卓晴,黃開勝,邵貝貝.學做智能車——挑戰(zhàn)飛思卡爾杯[M].北京:北京航空航天大學出版社,2007.
[2]許歡,唐競新.調制光尋線系統(tǒng)及其在自動行走機器人中的應用[J].清華大學學報:自然科學版,2002,42(1):115-117,142.
[3]邵貝貝.微處理器嵌入式應用的在線開發(fā)方法[M].北京:清華大學出版社,2004.
[4]安徽工程大學.一種面向路徑識的遠程遙控智能車:中國,201120478840.0[P].2012 -08 -15.
[5]張云洲,師恩義,吳成東,等.基于CCD的智能車導航系統(tǒng)研究[J].東北大學學報:自然科學版,2009,30(2):162-165.
[6]鄭建立,黃麗佳,葛鵬飛,等.基于CCD的智能車尋跡方法[J].東華大學學報:自然科學版,2008,34(6):728-730.
[7]孫書誠,郎朗,王虎.基于路徑識別的尋跡智能車設計與實現(xiàn)[J].安徽工程大學學報,2012,27(1):60-63.
[8]蘭華,李曉鵬,丁勇竣.智能車轉向系統(tǒng)模糊控制器設計研究[J].傳感器與微系統(tǒng),2010,29(5):34 -36.
[9]邱鐵,徐子川,江賀.基于模糊控制的智能車路況識別[J].計算機工程與應用,2009,45(14):213 -216.
[10]游林儒,胡慶華.雙舵機模糊控制在智能車控制中的應用[J].計算機工程與應用,2009,45(32):209 -211.
猜你喜歡
中學生數(shù)理化·七年級數(shù)學人教版(2021年6期)2021-11-22 07:50:58
中學生數(shù)理化·七年級數(shù)學人教版(2021年6期)2021-11-22 07:50:58
中學生數(shù)理化·七年級數(shù)學人教版(2021年6期)2021-11-22 07:50:58
中學生數(shù)理化·七年級數(shù)學人教版(2020年12期)2021-01-18 06:57:46
中學生數(shù)理化·七年級數(shù)學人教版(2020年12期)2021-01-18 06:57:46
表面工程與再制造(2019年6期)2019-08-24 06:40:04
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32