雙基陣方位—頻率勻加速運動目標跟蹤算法研究
2012-12-07 06:55:04許兆鵬韓樹平
傳感器與微系統 2012年7期
許兆鵬,韓樹平
(海軍潛艇學院 水聲中心,山東青島266042)
0 引言
微處理器性能與網絡技術的不斷提高,解決了多部傳感器同步工作和數據傳輸上的問題,使得多傳感器聯合使用進行目標跟蹤成為一個重要的研究方向,其中,應用兩部聲納基陣即雙基陣的量測信息對水中運動目標的跟蹤問題是研究的熱點之一。
勻加速運動是目標較為常見的運動方式,但尚沒有基于雙基陣量測信息對水中勻加速運動目標跟蹤方面的研究,以往的研究只針對勻速直線運動目標[1~4]。這里將雙基陣量測的目標方位信息和其中一部基陣量測的目標頻率信息作觀測融合后,根據勻加速運動狀態方程,建立雙基陣方位—頻率勻加速運動目標跟蹤系統。由于該跟蹤系統的觀測方程中含有非線性函數,則其為非線性系統。此時,對于系統的非線性性,根據量測值應用非線性濾波算法對勻加速運動目標進行狀態估計。為此,本文提出了一種雙基陣方位—頻率勻加速運動目標跟蹤算法。
本文又對該跟蹤系統的可觀測性進行了研究。所謂可觀測性,是指系統在忽略觀測噪聲情況下目標狀態是否有唯一解的問題,有唯一解則稱系統是完全可觀測的。可觀測性是跟蹤系統進行目標跟蹤的前提和基礎,只有滿足可觀測條件才能對系統進行正確求解,從而實現對目標的有效跟蹤。以往的研究表明:對于非線性系統的可測性有多種定義方法,而按照線性系統的有關理論,線性系統的可測性具有明確的定義[5]。由于該系統的非線性性,這里擬從線性系統可測性的有關理論出發,通過將雙基陣方位—頻率勻加速運動目標跟蹤系統偽線性化來進行可觀測性的研究,得到其可觀測性判定條件。最后,通過仿真驗證了算法的有效性和可觀測性判定條件的正確性。
1 雙基陣方位—頻率勻加速運動目標跟蹤算法
在水中目標被動跟蹤問題中,由于跟蹤距離遠遠大于目標深度,可以忽略深度的影響,將目標與雙基陣設定在同一平面內,即研究二維的目標被動跟蹤問題[6]。為了便于研究,假設雙基陣位于同一觀測平臺,以基陣1為坐標原點建立二維笛卡爾坐標系,基陣2位于x軸,雙基陣聲學中心的間距為L;采樣間隔為T,第k個采樣時刻目標以基陣1為基準的相對運動向量為 X(k)=[x(k),y(k),vx(k),vy(k),ax(k),ay(k)]T,x(k),y(k)為 x 方向與 y方向上的相對距離,vx(k),vy(k)為 x方向與 y方向上的相對速度,ax(k),ay(k)為x方向與y方向上的相對加速度;α(k)和β(k)分別為雙基陣所觀測的目標方位,如圖1所示,這里假設基陣1觀測的目標頻率信息為f(k),目標固有頻率為f0。
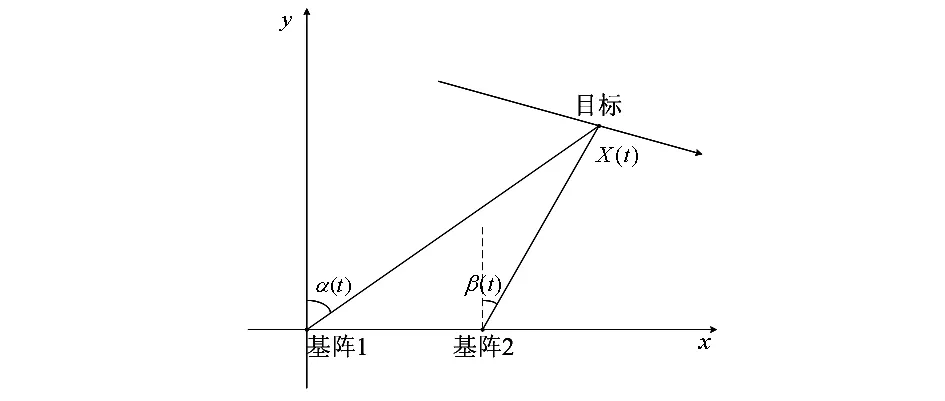
圖1 雙基陣跟蹤系統Fig 1 Tracking system of two sonar arrays
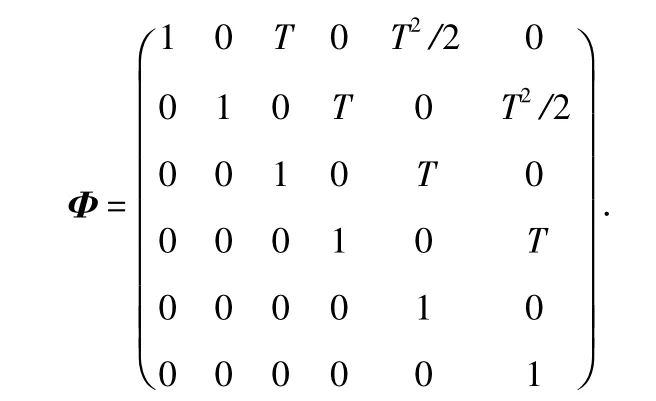
狀態方程為

式中 W(k)為過程高斯白噪聲,狀態矩陣Φ為
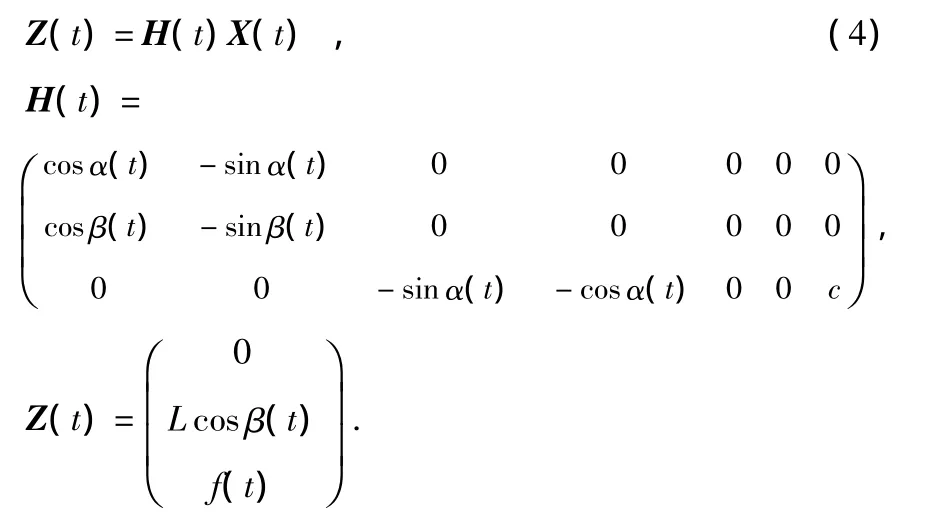
觀測方程為
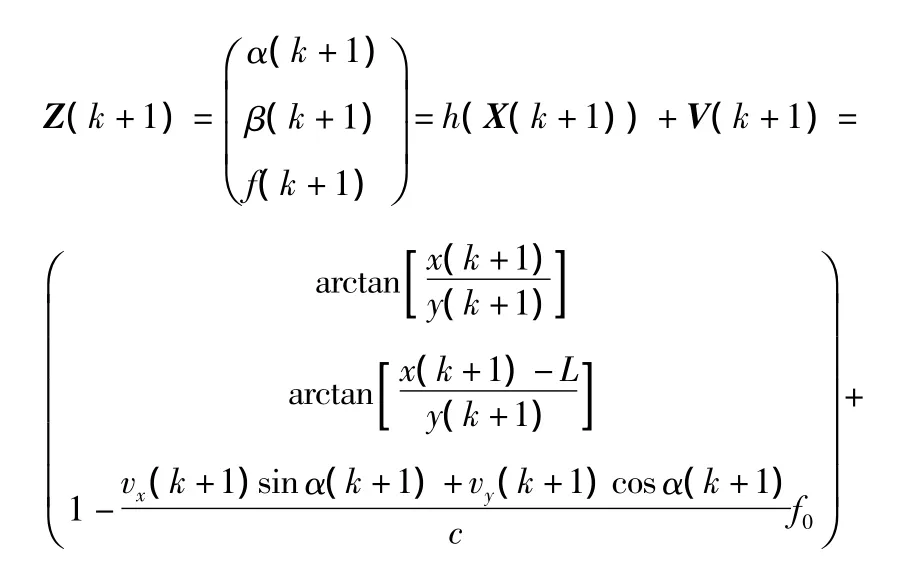

式中 V(k)是量測高斯白噪聲,c為聲速。
式(1)和式(2)構成了基于雙基陣方位—頻率的勻加速運動目標跟蹤系統。式(2)中含有非線性函數arctan{·},則此跟蹤系統為非線性系統。針對系統的非線性性,依據各采樣時刻的量測值,采用擴展卡爾曼濾波(EKF)算法或無跡卡爾曼(UKF)濾波算法等非線性濾波算法[7],對該系統進行勻加速運動目標狀態估計,從而可對勻加速目標進行跟蹤,此過程即構成了基于雙基陣方位—頻率勻加速運動目標跟蹤算法。
2 系統可觀測性判定
2.1 偽線性化
為了便于系統可觀測性判定,將跟蹤系統由離散形式改寫成連續時間系統的形式,并對觀測方程進行偽線性化。需說明的是:在分析過程中并沒有考慮噪聲的影響,這是因為噪聲的存在只對定位和跟蹤的精度有影響,而不影響系統的可觀測性。狀態向量改寫為
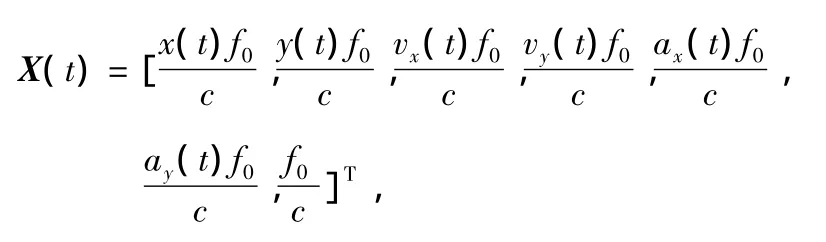
狀態方程改寫為式(3)
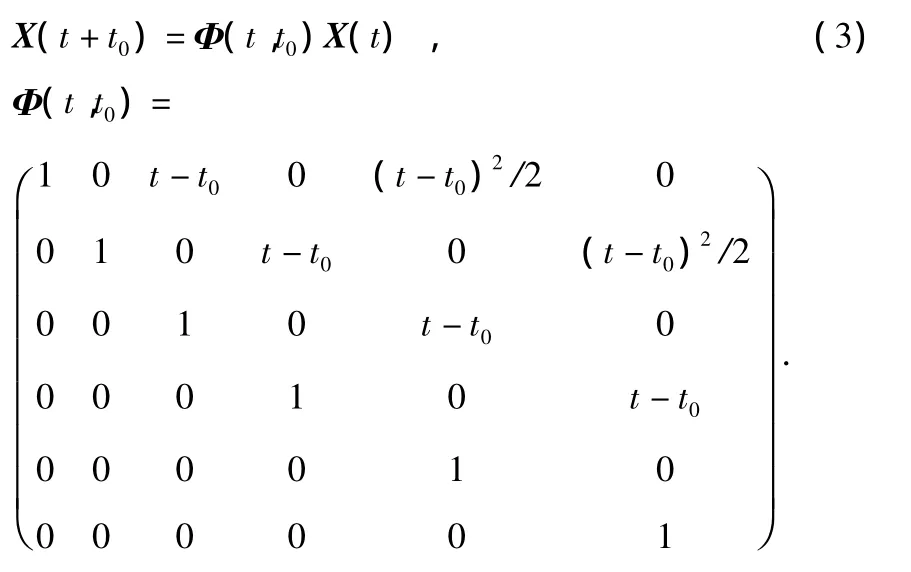
其中,t0為跟蹤起始時刻。
采用偽線性處理后[1,2],量測方程改寫為
2.2 可觀測性判定條件
這里采用Jaufferet C提出的可觀測性判定定理[5]
可觀測的充要條件是:?Y≠0∈Rn,?t∈[t0,t1],使得H(t)Φ(t,t0)Y≠0。
該定理又可用其逆否命題表述,可觀測充要條件是:?t∈[t0,t1],如果 H(t)Φ(t,t0)Y=0,則 Y=0。
其表明系統在時間段[t0,t1]內可觀測,當且僅當對任何一個非零向量 Y,總存在 t∈[t0,t1]使得 H(t)Φ(t,t0)Y≠0或者說若 H(t)Φ(t,t0)Y=0,則 Y 必須為0。
若假 設 Y= [y1,y2,y3,y4,y5,y6,y7]T,則 根 據H(t)Φ(t,t0)Y=0 可得方程組式(5)~ 式(7)
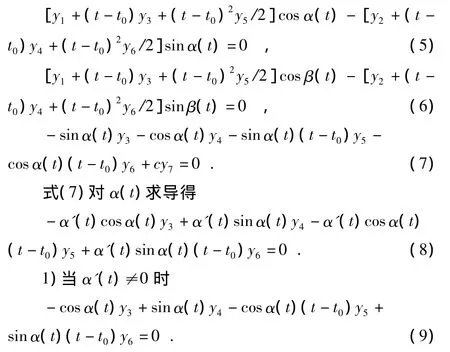
由于α(t)隨時間變化,要等式成立只能有y3=y4=y5=y6=0,將它們分別代入式(5)和式(7)可得式(10)和y7=0

由于α(t)隨時間變化,要等式成立只能有y1=y2=0。則Y即為零向量,所以,系統可觀測,此時只要基陣1測量的方位變化,即可滿足條件。
2)當 α'(t)=0時
式(8)恒為零,此時要使式(5)和式(6)組成的方程組有唯一解,則需方程組的行列式值 sin[α(t)-β(t)]不為零,則 α(t)-β(t)≠kπ。此時,由于行列式是隨t實時變化的,要使等式成立必有

亦由t-t0隨t實時變化,要使等式成立需y1=y3=y5=0和 y2=y4=y6=0,則式(7)中,y7=0。所以,得 Y=0,因此,系統可觀測,此時只要目標不在雙基陣連線上運動即可滿足條件。
綜上,雙基陣方位—頻率勻加速運動目標跟蹤系統可觀測條件為:只有當勻加速運動目標在雙基陣連線上運動,并且用于測量目標頻率的基陣所測量的方位值不發生變化時,系統才不可觀測外,其余情況均可觀測。
3 仿真驗證
為使問題簡化,假設兩部聲納均靜止不動,聲納1的坐標為(0,0 km),聲納2的坐標為(1,0 km),兩聲納方位測量均方誤差分別為0.2°和0.3°,聲納1頻率測量均方誤差為0.5 Hz,目標固有頻率為500 Hz,采樣周期為2 s;目標初始速度為零,初始位置(-5,0 km),航向90°,軸向分加速度(ax,ay)初始時為(0.04,0 m/s2),過坐標原點后變為(-0.04,0 m/s2),運動時間為1 000 s;采用本文所提方法進行跟蹤,濾波時選用UKF濾波算法,Monte—Carlo仿真次數為50,跟蹤結果如圖2所示。
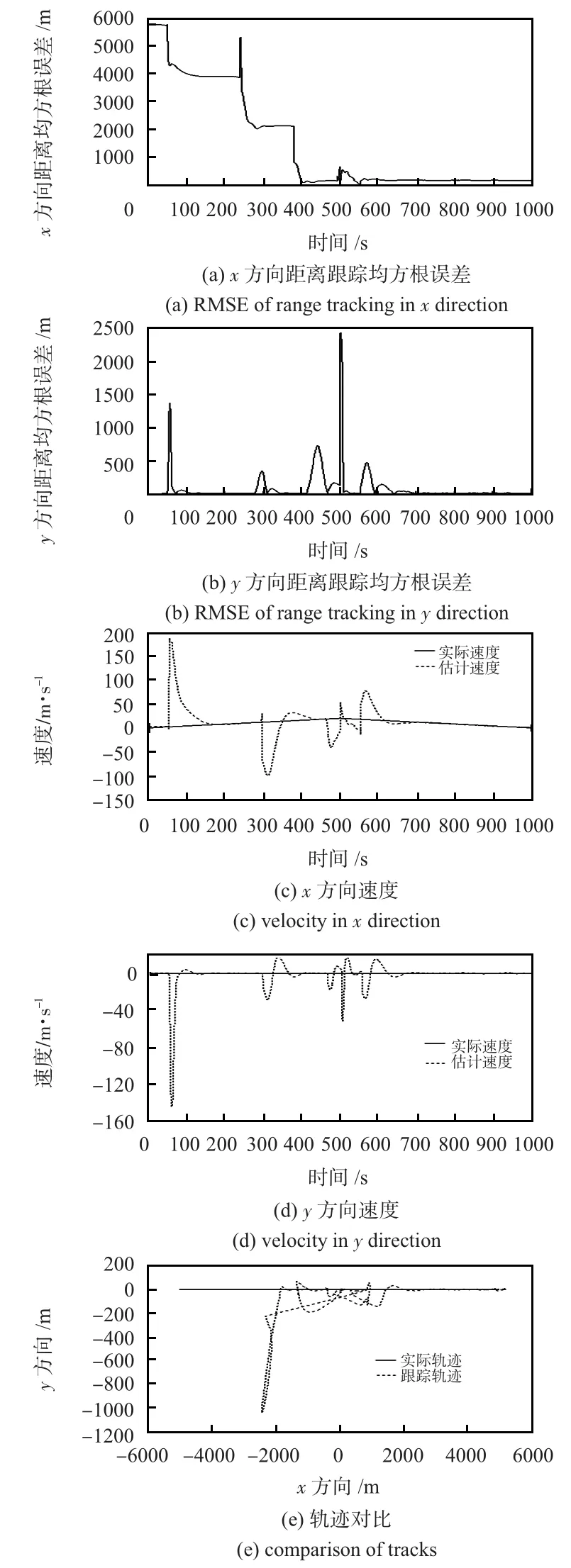
圖2 跟蹤結果Fig 2 Results of tracking
從仿真結果可看出:0~500 s,目標在雙基陣連線上運動,此時基陣1所測方位 α(t)恒為270°,即 α'(t)=0,不滿足可觀測條件,跟蹤結果不收斂;但當目標經過原點后,α(t)=90°,方位發生變化,α'(t)≠0,此時滿足可觀測條件,跟蹤結果收斂。此外,應用所提出的方法對目標穩定跟蹤時的跟蹤精度較高。
4 結論
基于雙基陣量測的方位信息和其中一部基陣量測的目標頻率信息,根據勻加速運動狀態方程,建立跟蹤系統,進而提出了一種基于雙基陣方位—頻率勻加速運動目標跟蹤算法。從偽線性化角度出發,用線性理論中可觀測性判斷定理對該跟蹤系統進行分析,給出了此系統的可觀測性判定條件。最后,通過仿真驗證了算法的有效性和可觀測性判定條件的正確性。
[1]杜選民,姚 藍.多基陣聯合的無源純方位目標運動分析研究[J].聲學學報,1999,24(6):605-610.
[2]陳伏虎,胡 青.多陣方位—頻率目標運動分析算法研究[J].聲學與電子工程,2003(7):1-5.
[3]關 欣,何 友,衣 曉.雙基陣純方位水下被動目標跟蹤性能仿真分析[J].系統仿真學報,2003,15(10):1464-1466.
[4]曲 毅,劉 忠,屈津竹.基于時延的水中目標純方位跟蹤算法[J].系統工程與電子技術,2007,29(1):107-109.
[5]胡友峰.非機動水下三維被動目標運動分析研究[D].西安:西北工業大學,2002:19-22.
[6]劉 忠,周 豐,石章松,等.純方位目標運動分析[M].北京:國防工業出版社,2009:77.
[7]郭曉松,李奕芃,郭君斌.貝葉斯目標跟蹤方法的研究[J].計算機工程,2009,35(12):137-139.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
體育科技文獻通報(2022年3期)2022-05-23 13:46:54
天津外國語大學學報(2021年3期)2021-08-13 08:32:18
遼金歷史與考古(2021年0期)2021-07-29 01:06:54
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
科技傳播(2019年22期)2020-01-14 03:06:54
裝備制造技術(2019年12期)2019-12-25 03:06:46
民用飛機設計與研究(2019年4期)2019-05-21 07:21:24
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34