三維立體空間定位算法的研究與實現*
2012-12-07 06:55:00彭建盛秦志強
傳感器與微系統 2012年7期
關鍵詞:模型
彭建盛,李 興,秦志強
(1.中國原子能科學研究院,北京102413;2.河池學院 物理與電子工程系,廣西宜州546300;3.湖南科技大學信息與電氣工程學院,湖南湘潭411201)
0 引言
無線定位技術是無線傳感器網絡(wireless sensor networks,WSNs)中的關鍵技術之一,無線定位技術根據定位方式的不同,對WSNs的定位方法分為基于測距和無需測距的兩種方法[1,2]。基于測距的方法主要是通過測量節點之間的距離或者角度信息,使用三邊測量法、三角測量法或最大似然法等定位算法來進行估算未知節點的位置[3];無需測距的方法主要利用空間幾何關系或者網絡多跳路由來完成定位,比如:DV-HOP(利用網絡多跳路由)、質心算法(利用空間幾何關系)、凸規劃、MDS-MAP等。
在基于測距的定位算法中[4],常用的測距技術包括到達時間(time of arrival,ToA)技術、到達時間差(time difference of arrival,TDoA)技術、到達角(angle of arrival,AoA)技術、接收信號強度指示(received signal strengh indication,RSSI)技術等[5]。本設計實現無線網絡無線定位的實現方式主要是基于RSSI的定位。
1 基礎理論模型的提出
WSNs綜合了傳感器技術、嵌入式技術,無線通信技術,分布式信息處理技術[6],其無線通信網絡中節點分為兩類,已知位置的節點稱為參考節點,未知位置的節點稱為定位節點。WSNs中利用RSSI來進行三維立體空間的定位,如圖1所示。
實現定位的最少參考節點為3個,A,B,C為參考節點,Z為未知位置的定位節點,由最少4個節點單元組成1個最小的三維立體空間定位系統。
A,B,C為已知位置的參考節點,其坐標分別為(x1,y1),(x2,y2),(x3,y3),O 為未知位置的定位節點,參考節點A,B,C到定位節點Z的距離分別為d1,d2,d3,設未知點Z的坐標為(x,y),則有式(1)

圖1 三維立體空間定位模型Fig 1 Three-dimensional spatial localization model
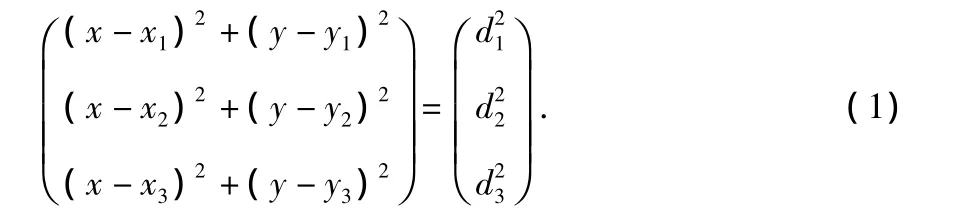
通過以上公式求解即可得到未知點O的坐標,從而實現定位,當然三邊測量法推廣,擴展到三維立體空間,實現基于三維立體空間的定位。
2 模型的理論依據
基于RSSI的測距,已知發射節點發射信號強度,接收節點根據接收到的信號強度,計算出傳輸路徑損耗,再根據經驗模型或理論模型將路徑損耗轉化為距離。
經驗模型的建立通常是先選取若干個已知位置的測試點,通過已知點的信號強度,建立參考節點位置和定位節點信號強度關系的一個數據比照表。在定位系統中,將測得的定位節點的信號強度與數據比照表中的數據進行比較,按照均方差最小等原則估算出定位節點的坐標。這種方法測得的定位精度與選取的已知位置節點的個數有關[7]。
基于理論模型的方法是采用無線電波傳播路徑損耗模型進行估計距離[7]。常用的傳播路徑損耗模型有自由空間傳播模型、對數距離路徑損耗模型和對數常態分布模型等。有研究發現,信道的長距離衰落特性服從對數正態分布,常用對數距離路徑損耗模型表示實際環境,其損耗模型為

式中 P(d)為參考距離為d時的路徑損耗,dBm;d為發射節點與接收節點之間的距離,m;P0為距離參考節點d0處的路徑損耗,n為路徑損耗因子。由式(2)知,接收點的信號強度PRSSI為式(3)

式中 PT為信號的發射功率,距離發射節點d0處的參考點接收的信號強度為A=PT-P(d),則得出式(4)

綜上由式(1),式(2),式(3),式(4)得出

則由式(5)得出式(6)

由式(6)就實現了距離的測量。A,n與射頻電路和無線信號傳輸環境密切有關,且隨著定位節點的移動,n是時變的。因此,實時得到A和n的精確值比較困難,本算法結合一般工程上n的取值與環境影響因子,有研究表明不同環境中的路徑損耗因子是不同的,如表1所示。

表1 不同建筑物的平均路徑損耗指數[9]Tab 1 Average path loss exponent of different buildings
A的值一般是1 m距離時接收信號的強度,通過實驗A值的最佳范圍值為45~49(這個視模塊加不加功放PA模塊而定),PRSSI可以由 CC2431 寄存器位 RSSIL.RSSI_VAI[10]讀取。
結合基于RSSI的距離公式(6)和三邊測量法公式(1)即可得到定位節點的坐標值,如式(7)所示

在空曠的草坪地上,做了一個距離為60 m的三維框架測試,取n=3.6,圖2為測試的數據和實際數據的比較。
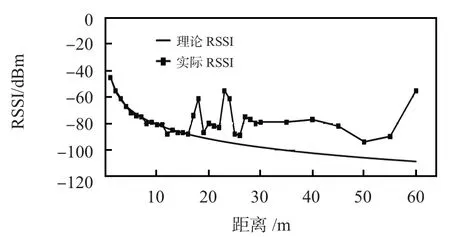
圖2 RSSI與距離關系的曲線圖Fig 2 Curves of relation between RSSI and the distance
根據實測數據分析,短距離內基于RSSI的測距數據較好,10 m以內測距誤差為0.5m,在15m以內,誤差為2m以內,超過15~16 m以后,由于多徑等環境等影響,RSSI的值與距離失去較好的線性關系。
3 模型的實際應用
由測距得出的數據結論,分析三維立體定位選擇區域范圍選擇,3個參考節點A,B,C在一個等腰三角形的頂點依次擺放好,在底面底為10 m,高為10 m的為等腰三角形,立體高為2 m的三維立體空間實現了三維立體定位,如圖3所示,定位節點 Z 依次放到 A,B,C,A',B',C',E,F,G,E',F',G'(其中參考節點坐標 A(0,0,2),B(10,0,2),C(5,10,2)處測試,對應的坐標為 Za,Zb,Zc,Za',Zb',Zc',Ze,Zf,Zg,Ze',Zf',Zg'實現了精度為1m的定位。通過在C#編寫的上位機界面上實時顯示了定位節點坐標,顯示定位節點坐標為(5.1,4.9,1.1 m),實際該點坐標為(5,5,1 m)。所得實驗結果的測量坐標與實際坐標數據對比如表2所示,誤差范圍最小的時候可以控制在0.5 m以內。
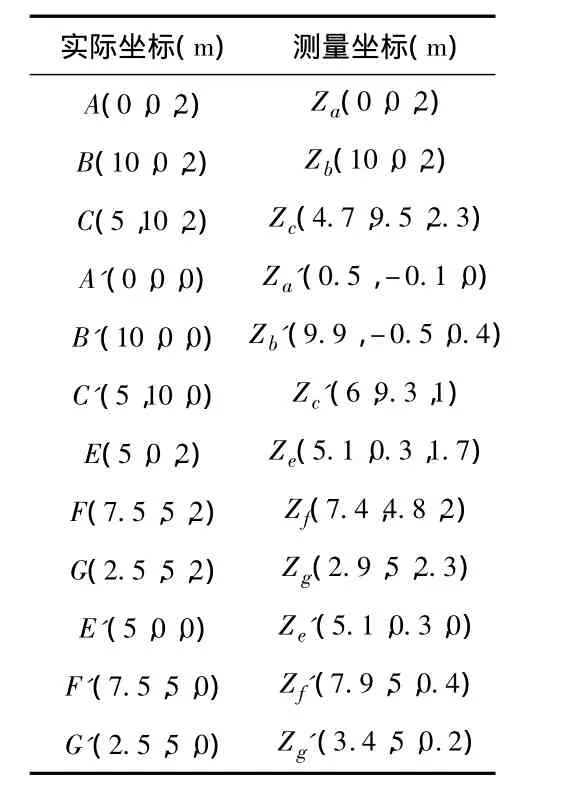
表2 三維立體空間定位坐標對照結果Tab 2 Comparison result of three-dimensional spatial localization coordinates
4 結束語
本文結合目前現有的基于RSSI的定位技術,提出的基于WSNs的三維立體空間定位算法,該算法通過RSSI測距,結合參考節點的坐標,實現未知定位節點坐標的確定,針對工程上路徑損耗因子的時變,在室內小距離范圍內,保持了測距的準確性,實驗結果表明:基于WSNs的三維立體空間定位算法可行,且精度較高,具有普遍的適用性。
[1]孫立民,李建中,陳 瑜,等.無線傳感器網絡[M].北京:清華大學出版社,2005.
[2]王福豹,史 龍,任豐原.無線傳感器網絡中的自身定位系統和算法[J].軟件學報,2005,16(5):857-868.
[3]鄭君剛,馬 斌,陳 彪,等.基于RSSI測距和距離幾何約束的節點定位算法[J].電子產品世界,2010(5):27-29.
[4]Charalampos F,Maria P.Cooperative location sensing for wireless networks[C]∥Proceedings of the 2nd IEEE Annual Conference on Pervasive Computing and Communications,Orlando:IEEE Computer Society,2004:121-131.
[5]Farahani S,Helle B.Zig Bee wireless networks and transceivers[M].USA:Newnes Publications,2008.
[6]崔光照,陳富強,張海霞,等.基于ARM9的無線傳感器網絡網關節點設計[J].電子技術應用,2008,11:115-118.
[7]于 寧,萬江文,馬萬興.無線傳感器網絡三維抽樣定位[J].北京郵電大學學報,2008,31(3):13-18.
[8]王 玫,鄭 晨.一種基于RSSI測距的室內自適應智能定位算法[J].傳感器與微系統,2010(12):114-117.
[9]陳紅陽.基于測距技術的無線傳感器網絡定位技術研究[D].成都:西南交通大學,2010.
[10]TI Company.CC2431 system-on-chip for 2.4GHz Zig Bee(TM)/IEEE 802.15.4 with location engine[EB/OL].[2007—06—15].http:∥www.ti.com.cn/cn/lit/ds/symlink/cc2431.pdf.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19