IPMSM控制系統逆變器死區效應分析與在線補償
2012-09-22 03:19:10,,,
電氣傳動 2012年1期
關鍵詞:效應
,,,
(1.中國科學院 電工研究所,北京 100190;2.中國科學院 研究生院,北京 100190)
1 引言
理想的三相SVPWM電壓源逆變器(VSI)同一橋臂上下管開通信號是互補的,但是由于功率管開通和關斷需要時間,且開通速度比關斷速度快,因此必須人為在功率管開關動作期間插入一段死區時間[1]。該死區時間導致逆變器輸出電壓和目標電壓之間存在誤差,且該誤差與電流方向有關,它的累積效應足以導致PMSM相電壓和相電流畸變、零電流鉗位以及轉矩和轉速脈動,系統性能降低[2]。另外由于開關頻率的不斷提高,死區效應對逆變器輸出電壓和輸出電流的影響也越來越嚴重。因此為提高IPMSM控制性能,對逆變器死區進行有效補償是非常必要的。
死區精確補償需2個條件:誤差電壓ΔV和電流方向正確估算。目前國內外研究死區補償方法主要有:根據負載電流極性進行離線死區補償[3-5];用觀測器觀測出誤差電壓在線死區補償[6-8]。
第1種方法是基于平均誤差理論,忽略了功率器件開關時間、通態管壓降等因素。由于死區隨著負載、工作溫度以及電機轉速等情況的變化而變化,簡單的固定時間或電壓補償必然事與愿違[8]。另外在低頻時,由于PWM噪聲、零電流鉗位現象以及電流穿越零點的速度等,精確檢測電流穿越零點非常困難,若采用硬件方法檢測電流極性,往往存在檢測的滯后以及A/D轉換精度等問題,因此一般采用間接測量的方法[3-4]。
第2種方法將死區設置時間、功率管壓降、開關延遲時間及電機工況變化等引起的電壓變化等效為一個誤差電壓,采用一定的方法觀測出來,在線進行死區補償[6,9]。
本文在同步旋轉坐標系下采用雙擾動觀測器觀測出VSI死區效應導致的誤差電壓,然后將該擾動前饋給指令電壓,實現了IPMSM控制系統在線實時死區補償。
2 VSI死區效應分析
2.1 VSI死區對輸出電壓的影響
圖1是VSIa相橋臂的基本配置,在死區時間Td里,該橋臂上下管Q1和Q4均關斷,此時輸出電壓由相電流ia的方向決定。規定電流流入電機為正,流出為負。圖2b是只考慮人為設定死區時間Tdt時VSIa相輸出端電壓;圖2c為考慮Tdt和逆變器開關延遲時間Tond,Toffd時VSIa相輸出端電壓;圖2d是考慮Tdt,Tond,Toffd以及IGBT飽和壓降Vsat和續流二極管前向壓降Vdiode時VSIa相輸出端電壓。因此VSIa相在1個周期理想輸出電壓和實際輸出電壓的誤差Va.d表示為

式中:Ts為一個PWM周期。
同理得VSIb相和c相輸出誤差電壓Vb.d,
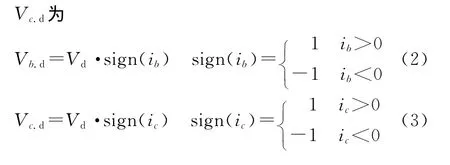
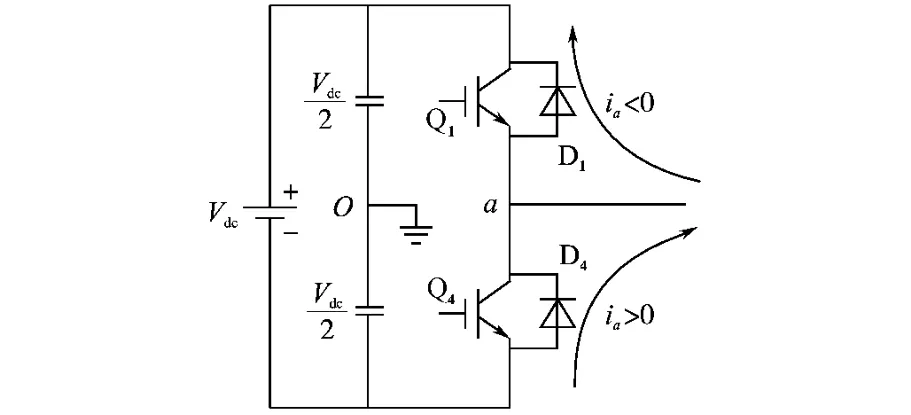
圖1 VSI一相橋臂的基本配置Fig.1 Basic configuration of one phase leg of VSI
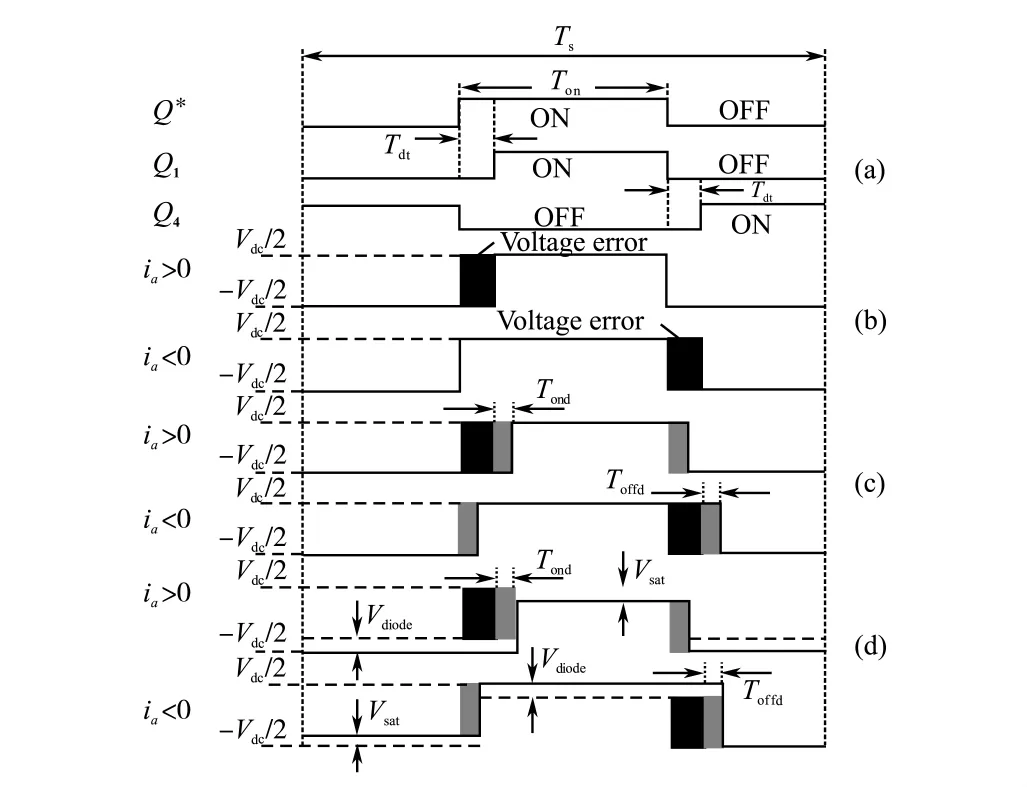
圖2 實際情況下VSI a相輸出電壓Fig.2 Actual VSI a-phase output voltages
由式(1)~式(3)知VSI輸出誤差電壓矢量方向是由流過VSI功率管電流方向決定的。
VSI施加到IPMSM上的相誤差電壓Van.d,Vbn.d,Vcn.d為
假設Va.d,Vb.d,Vc.d幅值相等均等于Vd,則式(4)經傅里葉變換得
式中:k=1,2,3,…;n為諧波次數;ω為電角速度。
由式(5)知電機三相誤差電壓波形中含有6k±1次諧波,根據線性疊加定理知VSI死區效應導致IPMSM三相電壓中含有6k±1次諧波。
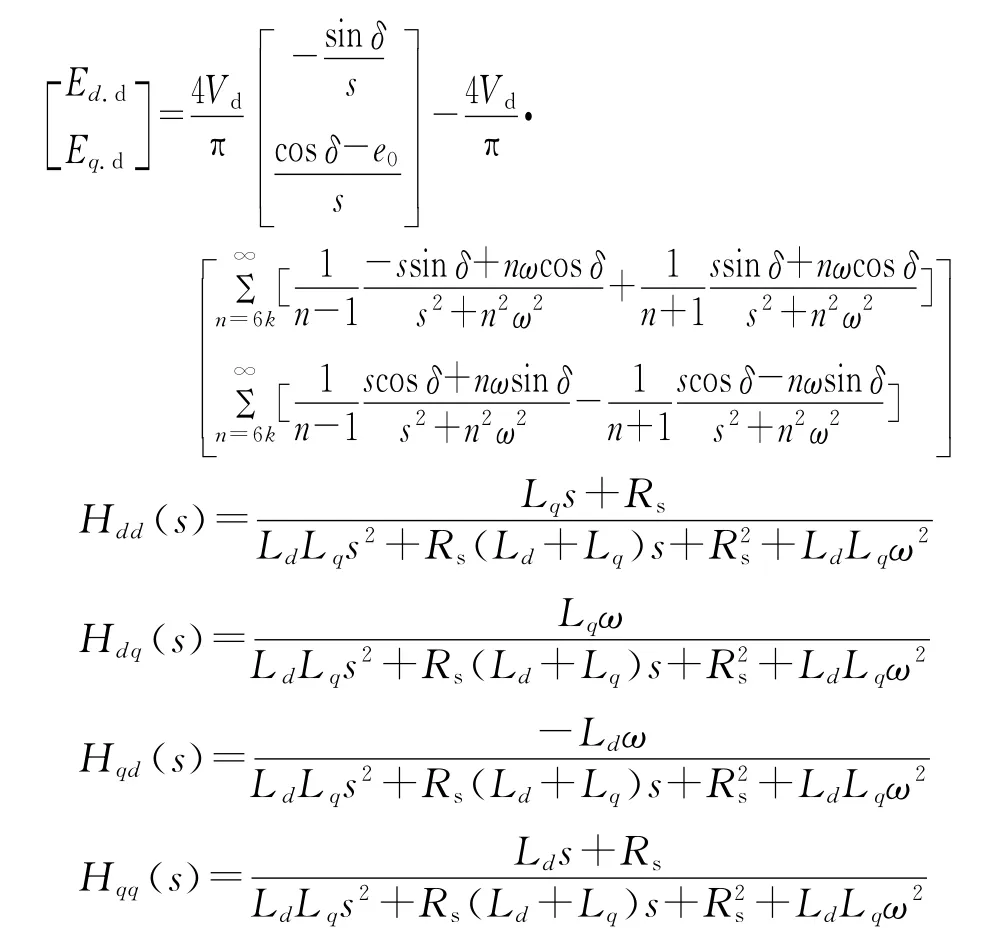
式(5)經旋轉變換得轉子旋轉坐標下的誤差電壓為:
式中:δ為定子電流空間矢量與轉子旋轉坐標系下q軸夾角。
誤差電壓示意波形如圖3所示。
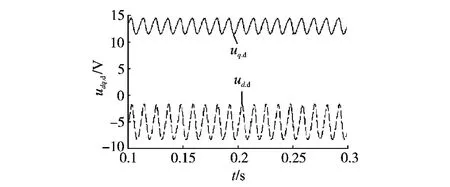
圖3 VSI死區效應引起的同步旋轉坐標系下誤差電壓示意圖Fig.3 Schematic of VSI dead-time effects result in voltage errors in the rotating reference frame
2.2 VSI死區對輸出電流的影響
由于電機實際相電壓是理想基波電壓和死區效應產生的誤差電壓的疊加。在理想電機模型下,基波相電壓肯定產生基波相電流。為便于推導,只考慮死區效應導致相誤差電壓對相電流的影響。
在同步旋轉坐標系dq軸下,理想IPMSM頻域電壓模型為

式中:Rs為定子相電阻;Ld,Lq,Id,Iq,Ud,Uq分別為同步旋轉坐標系下d軸和q軸電感、電流和電壓;Ψf為永磁磁鏈;Ed=Ud;Eq=Uq-ωΨf=Uq-e0。
由式(7)解得同步旋轉坐標下VSI死區效應導致的誤差電流Id.d,Iq.d為

其中
由式(8)知同步旋轉坐標系下VSI死區效應導致誤差電流含有6k次諧波,如圖4所示。根據線性疊加原理,VSI死區效應導致電機在同步旋轉坐標系下電流含有6k次諧波,反變換后,電機在三相靜止坐標系下相電流含有6k±1次諧波。
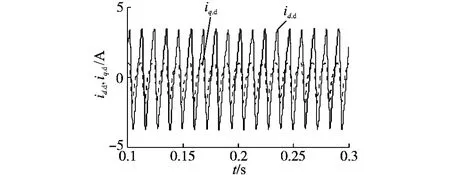
圖4 死區效應導致的同步旋轉坐標系下誤差電流示意圖Fig.4 Schematic of current errors induced by VSI deadtime effects in the rotating reference frame
3 基于擾動觀測器的死區補償
擾動觀測器的基本思想[10]是根據實際模型的輸入與標稱模型的輸出的差異構建干擾信號觀測器,將其估算出的等效干擾作為補償信號疊加到實際模型的輸入中,以消除干擾對系統性能的影響。
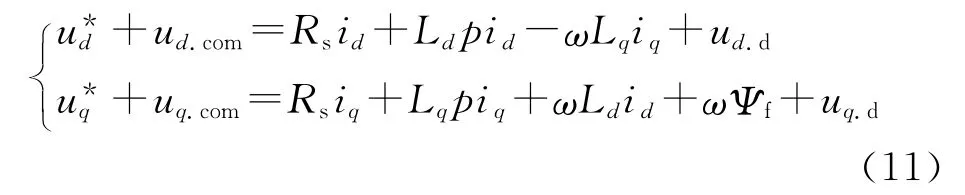
IPMSM在同步旋轉坐標系下的電壓方程[8]為

VSI死區效應致使電機在轉子旋轉坐標系下有ud.d,uq.d誤差電壓,但是電流環 PI控制器為了消除死區產生的誤差電壓,在指令電壓,中增加了ud.d,uq.d,因此此時IPMSM 電壓方程為

在同步旋轉坐標系下加入死區補償電壓ud.com,uq.com后,IPMSM 電壓方程為
對比式(10)和式(11),當補償電壓ud.com,uq.com和誤差電壓ud.d,uq.d完全一致時,指令電壓,就對應實際的ud,uq,此時PI控制器無需提供死區補償電壓,消除了死區補償的耦合。
設擾動電壓是指令電壓和系統實際輸出電壓的差值,包括死區效應引起的誤差電壓。在同步旋轉坐標系下,借助下式擾動觀測器觀測出該擾動電壓,將其加入指令電壓中進行補償。
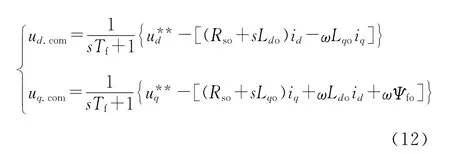
式中:Tf為濾波時間常數;Rso為定子估算電阻;Ldo,Lqo分別為d軸和q軸估算電感;Ψfo為估算永磁磁鏈。
本文所設計的雙擾動觀測器如圖5所示。
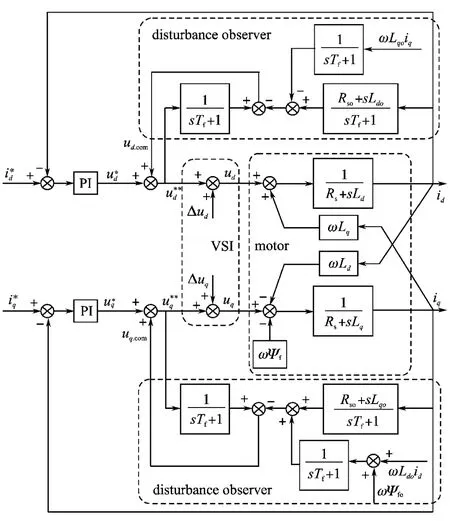
圖5 基于雙擾動觀測器的在線死區補償原理圖Fig.5 Block diagram of on-line dead-time compensation using double disturbance observers
d軸輸出電壓ud對擾動電壓Δud和指令電壓的傳遞函數為
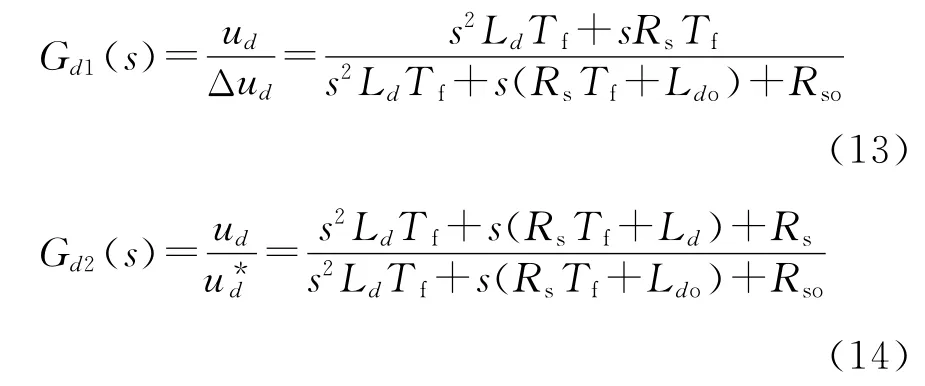
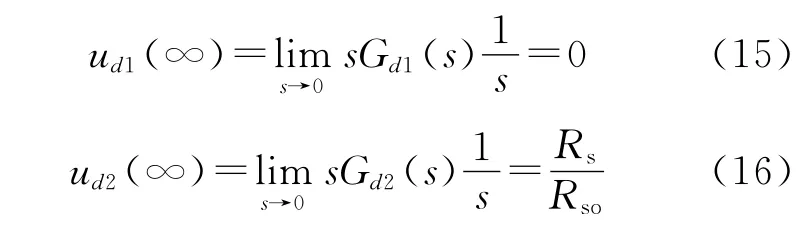
當擾動電壓Δud和指令電壓為階躍輸入時,由終值定理得式(13)和式(14)的穩態輸出電壓ud為
q軸輸出電壓uq對擾動電壓Δuq和指令電壓的傳遞函數為
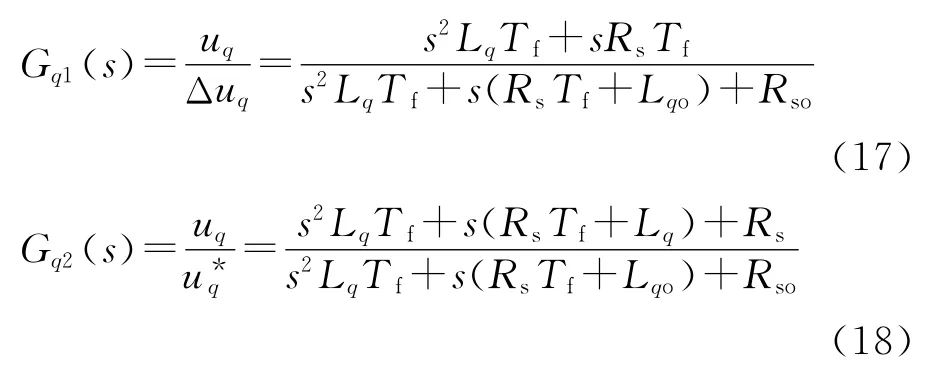
擾動電壓Δuq和指令電壓為階躍輸入時,式(17)和式(18)的穩態輸出電壓uq為
根據式(15)和式(19)知基于擾動觀測器的在線死區補償方法對Rso,Ldo和Lqo具有魯棒性,能抑制逆變器擾動。由式(16)和式(20)得:若定子電阻觀測精確,逆變器加到電機上的電壓就是指令電壓。
4 實驗驗證
本文對所提出的死區補償方法進行了實驗驗證。VSI控制核心采用TMS320F2812DSP,功率模塊采用英飛凌的FF600R06ME3IGBT。IPMSM參數為:額定功率20kW,額定轉速2 500 r/min,極對數3,定子相電阻26mΩ,d軸電感0.52mH,q軸電感1.02mH,永磁磁鏈0.129 Wb。負載由南峰CW160電渦流測功機提供,電流波形由Agilent DSO6034示波器和FLUKS i400s電流鉗測得,測量精度為1mV/A。實驗中設定母線電壓330V,電機轉速300r/min,系統設定死區時間3.2μs,δ為20°,Tf=1ms。
圖6是負載轉矩為15N·m時補償前后的相電流波形和頻譜;圖7是負載轉矩為35N·m時相電流波形和頻譜。比較補償前后的電流波形和頻譜發現,沒有進行死區補償前,電流波形正弦度較差,不光滑,存在明顯的零電流鉗位現象,畸變較嚴重,負載15N·m時電流總諧波畸變率是8.254 1%,負載35N·m時電流總諧波畸變率是6.329 3%;而使用基于擾動觀測器在線死區補償方法后電流波形正弦度明顯改善,零電流鉗位現象得到有效抑制,負載15N·m時電流總諧波畸變率降為4.569 7%,負載35N·m時電流總諧波畸變率降為4.615 7%,同時有效削弱了5th,7th,11th,13th等諧波,系統性能得到明顯改善。
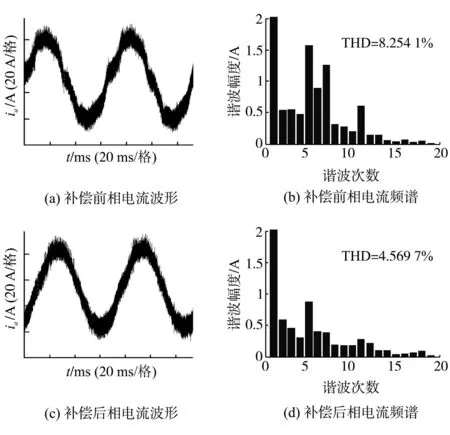
圖6 負載15N·m時補償前后相電流波形和頻譜Fig.6 Phase current waveforms and spectra before and after compensation with the load torque of 15N·m
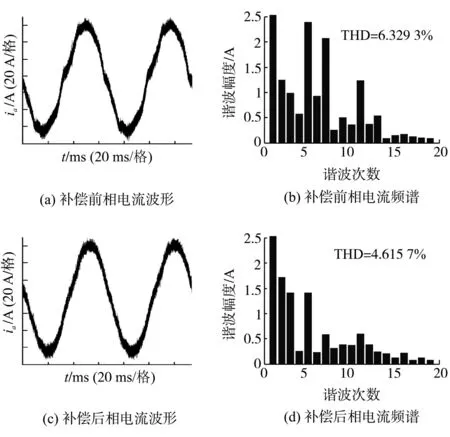
圖7 負載35N·m時補償前后電機相電流波形和頻譜Fig.7 Phase current waveforms and spectra before and after compensation with the load torque of 35N·m
5 結論
本文詳細地分析了電壓源逆變器死區效應,針對IPMSM SVPWM控制系統,提出了基于雙擾動觀測器在線死區補償方法,實現了死區效應抑制和PI控制的解耦。
該死區補償策略避免了電流極性檢測不準導致的誤補償和死區時間估算等問題。
實驗結果表明該策略有效抑制了零電流鉗位現象,削弱了低頻電流諧波,改善了電流正弦度,提高了系統低速運行性能。
[1]黃志武,陽同光.一種新型的矢量控制逆變器死區時間補償[J].電氣傳動,2008,38(8):48-51.
[2]鐘義長,鐘倫瓏,陳聰.PMSM交流伺服系統死區效應補償策略與實現[J].電氣傳動,2010,40(11):73-75.
[3]王高林,于泳,楊榮峰,等.感應電機空間矢量PWM控制逆變器死區效應補償[J].中國電機工程學報,2008,28(15):79-83.
[4]胡慶波,呂征宇.一種新穎的基于空間矢量PWM的死區補償方法[J].中國電機工程學報,2005,25(3):13-17.
[5]劉軍鋒,李葉松.死區對電壓型逆變器輸出誤差的影響及其補償[J].電工技術學報,2007,22(5):117-122.
[6]Hyun-Soo K,Hyung-Tae M,Myung-Joong Y.On-line Dead-time Compensation Method Using Disturbance Observer[J].IEEE Transactions on Power Electronics,2003,18(6):1336-1345.
[7]劉棟良,賀益康.交流伺服系統逆變器死區效應分析與補償新方法[J].中國電機工程學報,2008,28(21):46-50.
[8]Urasaki N,Senjyu T,Uezato K,etal.Adaptive Dead-time Compensation Strategy for Permanent Magnet Synchronous Motor Drive[J].IEEE Transactions on Energy Conversion,2007,22(2):271-280.
[9]Hyun-Soo K,Kyeong-Hwa K,Myung-Joong Y.On-line Dead-time Compensation Method Based on Time Delay Control[J].IEEE Transactions on Control Systems Technology,2003,11(2):279-285.
[10]于艾,楊耕,徐文立.具有擾動觀測器調速系統的穩定性分析及轉速環設計[J].清華大學學報:自然科學版,2005,45(4):521-524.
猜你喜歡
核科學與工程(2021年4期)2022-01-12 06:30:26
今日農業(2020年19期)2020-12-14 14:16:52
小學生必讀(中年級版)(2020年9期)2020-12-04 02:07:22
科學大眾(2020年17期)2020-10-27 02:49:10
紅土地(2018年11期)2018-12-19 05:10:56
意林·全彩Color(2018年9期)2018-11-13 22:49:38
中學物理·高中(2016年12期)2017-04-22 11:53:03
中國衛生(2016年4期)2016-11-12 13:24:14
中國衛生(2014年4期)2014-12-06 05:57:14
小櫻桃·童年閱讀(2014年11期)2014-12-01 22:21:30