基于定子磁鏈規劃的異步電機最優效率控制
2012-09-22 03:19:06,,
電氣傳動 2012年1期
,,
(中山大學 物理科學與工程技術學院,廣東 廣州 510275)
1 引言
在傳統的異步電機控制系統中,電機一般運行在額定磁鏈的條件下,在額定負載狀態下,電機的效率較高,然而在輕負載時,由于過多的鐵損和銅損,降低了電機的效率[1]。本文研究異步電機效率優化及直接轉矩控制性能改善問題,根據電機的效率模型以及定子磁鏈、轉子磁鏈的關系,提出了基于定子磁鏈規劃的效率優化方法,通過檢測比較各個磁鏈值對應的功率損耗,在線搜索出消耗功率最小的磁鏈值。仿真結果表明本文提出的定子磁鏈規劃效率優化算法能夠減小異步電機輕負載時的輸入功率,對電機的穩定運行不會產生顯著影響。
2 定子磁鏈規劃的原理和設計
2.1 異步電機的損耗模型
對于籠式異步電機,在d-q坐標系下,轉子電壓urd=urq=0,由于規定d軸方向為轉子磁鏈的方向,則Ψrq=0,因此,在穩態運行下電機的電壓和電磁轉矩方程為
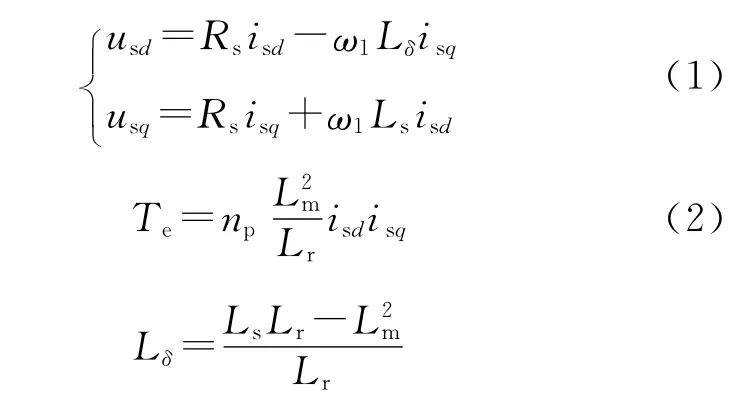
式中:下標d,q表示d-q坐標系;下標s,r分別為定子和轉子;np為極對數;Lm為互感;ω1為定子角頻率;Te為轉矩。
定子端的輸入功率為

將式(1)代入式(3),得到輸入功率為

由Ψrd=Lmisd=Ψr,并把式(2)代入式(4)得到:

在磁鏈定向條件下轉差頻率為
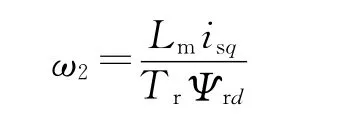
其中,Tr=Lr/Rr,將ω1=ω2+npωr代入式(5)得到:

式中:ωr為轉子的機械轉動角頻率。
在異步電機穩態運行時,電機的運行效率表示為

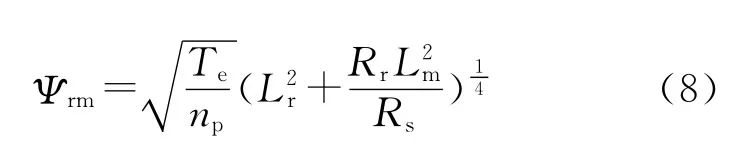
從式(7)可以看出,在異步電機的運行條件不變的情況下,若要電機效率最大,只需要電機定子側有功功率Pin最小即可[2]。
由?Pin/?Ψr=0,則對應于電機損耗最低時的轉子磁鏈值為
由于轉子的磁鏈值不可測,如果在比較計算得到的定子磁通和給定定子磁通的同時,再運用磁鏈觀測器來計算轉子磁通會增加系統的冗余。由定子、轉子磁鏈極坐標表示的異步電機的模型可知定子磁鏈和轉子磁鏈的關系為

由式(9)可知,在穩態運行下定子磁鏈和轉子磁鏈的關系為

其中

在直接轉矩控制中,通過空間電壓矢量的選擇來調節定子磁鏈的旋轉速度,使得定子磁鏈和轉子磁鏈之間的夾角在長時間下平均恒定,即k=const,定子磁鏈和轉子磁鏈具有恒定的比例關系,因此在本文中使用定子磁鏈來代替轉子磁鏈來實現電機效率的優化控制。
2.2 磁鏈規劃效率優化算法的設計
由以上分析可知,只要尋求到合適的定子磁鏈值,就可以達到直接轉矩控制系統的效率最大。一維搜索最常用的搜索方法是黃金分割法,適用于在一固定區間的任何單峰函數求極小值的問題。在本系統中采用黃金分割法來搜索功率消耗最小時的定子磁鏈值。電機的額定磁通為1.2 Wb,為了計算的方便,在搜索算法中對磁鏈值進行正則化無量綱處理,選擇磁通比例值的變化范圍即搜索范圍[a,b]為[0,1],在輸出磁通值的時候乘以1.2。
程序運行開始,在T1時刻取a1值為0.382,作為對應定子磁鏈的值,在程序運行下一時刻T2取a2值為0.618,同時采樣得到功率值y1,該值為上一個時刻對應磁鏈值的輸入功率。在T3周期,采樣得到輸入功率值y2。比較y1和y2,如果y1≥y2,則將搜索范圍縮小至[a1,b],重新定義a1和a2的值;如果y1<y2,則將搜索范圍縮小至[a,a2]。從搜索流程看出,系統輸入功率值總是在下一個周期采樣完成的,每經過一次比較,搜索范圍縮小到原來的0.618倍。當a1和a2的差值大于ε=0.005時,進行新一輪的采樣判斷,當a1和a2的差值小于等于ε時,停止搜索,輸出為a1和a2的平均。
3 控制系統的設計
用Matlab的Simulink進行仿真,控制系統結構框圖如圖1所示。為了提高系統的動靜態性能、提高系統收斂速度引進了模糊控制模塊,在逆變部分采用了單元級聯型三電平逆變電路,由更多的空間電壓矢量來構造模糊控制規則,實現更精確的控制。逆變模塊輸出的電流、電壓被分別采樣,經過克拉克(Clarke)變換,產生兩相電流和電壓,作為磁鏈觀測、轉矩計算的輸入。磁鏈觀測完成后根據磁鏈在α,β軸上的分量計算定子磁鏈所在的角度。在電機的輸入端觀測輸入功率,作為定子磁鏈優化模塊的輸入。給定磁鏈值、由速度控制器輸出的轉矩值與磁鏈觀測器觀測的磁鏈值、計算得到的轉矩值比較后送入模糊控制器,由模糊控制器產生脈沖選擇信號,經Pulse模塊產生脈沖,送入逆變模塊。
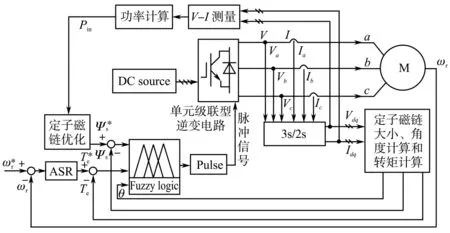
圖1 控制系統結構框圖Fig.1 Control system block diagram
4 實驗結果
系統仿真的電機參數為:額定線電壓380V,額定轉矩14.6N·m,額定頻率60Hz,額定轉速1 420r/min,額定功率因數0.85,額定功率2.2 kW,R1=0.877Ω,R2=1.47Ω,L1=4.34mH,L2=4.34mH,Lm=4.34mH,np=2,轉動慣量J=0.015kg·m2。
圖2a和圖2b分別表示負載轉矩T1=4N·m和T1=8N·m時的轉矩曲線。圖3a和圖3b分別表示負載轉矩T1=4N·m和T1=8N·m時的定子磁鏈的變化波形。
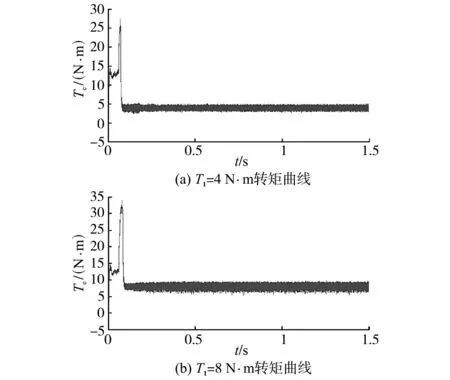
圖2 轉矩曲線Fig.2 Torque curves
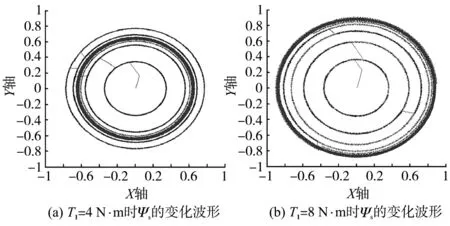
圖3 Ψs變化波形Fig.3 The variable waveforms ofΨs
從圖2可以看出,電機的轉矩曲線從起始到穩態的時間小于0.1s,系統可以較快穩定,動態性能沒有受到顯著影響。
由式(8)和式(10)可知,不考慮電機參數,電機控制系統的定子最優磁鏈值只與電機的轉矩有關,而和轉速無關。從圖3a可以看出,當T1=4 N·m時,最終觀測到的定子磁鏈值Ψs=0.64 Wb;從圖3b可以看出,當T1=8N·m時,最終觀測到的定子磁鏈值Ψs=0.88Wb。由式(9)和式(10)得到:

由此證明,用定子磁鏈的變化來實現磁鏈規劃效率優化是可行的。圖4表示在轉矩T1=4 N·m時的效率優化過程,即不同定子磁通對應的系統損耗的有功功率(局部放大),從圖4中看出,輸入功率逐漸逼近到最小。
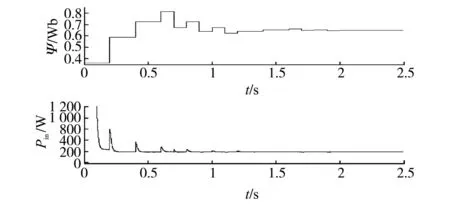
圖4 定子磁鏈和有功功率的變化波形Fig.4 The waveforms of stator flux and active power
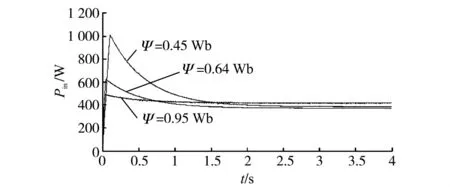
圖5 不同磁鏈下對應的電機輸入功率PinFig.5 The waveforms of Pinin different flux
圖5表示在T1=4N·m,ωr=100rad/s,其他參數相同情況下,系統在磁鏈值Ψs=0.45 Wb、最優磁鏈值Ψs=0.64Wb和磁鏈值Ψs=0.95Wb時電機控制系統的輸入功率Pin波形。初始階段系統啟動需要很大的啟動電流,啟動后由于勵磁電感的滯流特性,系統波動的時間增加。從圖5中可以看出,Ψs=0.45Wb時的輸入功率為390W,Ψs=0.95Wb時的輸入功率為415W,在最優磁鏈值Ψs=0.64Wb時的輸入功率為372 W,相對于前兩種磁鏈值系統輸入功率分別減少了4.6%和10.4%。因此,經過磁鏈規劃后的電機控制系統的輸入功率明顯減小,可以穩定工作在最小的輸入功率狀態,效率得到提高。
5 結論
本文研究直接轉矩控制性能改善及異步電機效率優化問題,對傳統的直接轉矩控制技術進行了改進。由異步電機的基本模型及效率模型,確定了定子磁鏈和轉子磁鏈的關系,提出了基于定子磁鏈規劃來實現三相異步電機的最優控制。通過在線檢測計算各個磁鏈值對應的功率損耗,運用黃金分割法進行在線搜索,尋求并逼近消耗功率最小的定子磁鏈值,達到電機系統損耗最小、效率最大。
仿真分析結果表明,本文定子磁鏈規劃的效率優化算法可行,該方法不依賴電機的模型和參數,能夠減小異步電機輕負載時的輸入功率,明顯提高電機在輕負載情況下的效率,并且收斂速度較快。
[1]Bose Bimal K.現代電力電子學與交流傳動[M].王聰,趙金,于慶廣,等,譯.北京:機械工業出版社,2005.
[2]苗敬利,李華德,胡廣大,等.感應電機效率優化的自適應反步控制研究[J].電機與控制學報,2009,13(5):749-753.
[3]楊耕,羅應立.電機與運動控制系統[M].北京:清華大學出版社,2006.
[4]Matsuse K,Katsuta S,Tsukakoshi M,etal.Fate Rotor Flux Control of Direct-field-oriented Induction Motor Operating at Maximum Efficiency Using Adaptive Rotor Flux Observer[C]∥Thirtieth IAS Annual Meeting.Florida:Conference Record of the 1995,IEEE,1995:327-334.
[5]Cao-Minh Ta,Hori Y.Convergence Improvement of Efficiency-optimization Control of Induction Motor Drives[J].IEEE Transactions on Idustry Applications,2001,37(6):1746-1753.
[6]張崇魏,李漢強.運動控制系統[M].武漢:武漢理工大學出版社,2002.
[7]Kirschen Daniel S,Novotny Donald W,Suwanwisoot Warin.Minimizing Induction Motor Losses by Excitation Control in Variable Frequency Drives[J].IEEE Transactions on Idustry Applications,1984,20(5):1244-1250.
[8]Takahashi Isao,Noguchi,Toshihiko.A New Quick-response and High-efficiency Control Strategy of an Induction Motor[J].IEEE Transactions on Industry Applications,1986,22(5):820-827.
[9]Matsuse K,Yoshizumi T,Katsuta S,etal.High-response Flux Control of Direct-field-oriented Induction Motor with High Efficiency[J].IEEE Transactions on Industry Applications,1999,35(1):62-69.
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
甘肅教育(2020年14期)2020-09-11 07:57:42
中學生數理化(高中版.高考數學)(2020年5期)2020-06-02 09:19:08
商周刊(2017年9期)2017-08-22 02:57:49
時代英語·高二(2015年1期)2015-03-16 00:08:11
現代企業(2015年2期)2015-02-28 18:45:09