納偽概率可控的四舍五入法及其在RTK模糊度固定中的應用
2012-09-07 03:39:52李博峰沈云中張興福
測繪學報 2012年4期
李博峰,沈云中,張興福
1.同濟大學 現代工程測量國家測繪地理信息局重點實驗室,上海200092;2.同濟大學 測量與地理信息學院,上海200092;3.廣東工業大學測繪工程系,廣東廣州510006
納偽概率可控的四舍五入法及其在RTK模糊度固定中的應用
李博峰1,沈云中2,張興福3
1.同濟大學 現代工程測量國家測繪地理信息局重點實驗室,上海200092;2.同濟大學 測量與地理信息學院,上海200092;3.廣東工業大學測繪工程系,廣東廣州510006
RTK模糊度固定通常采用序貫四舍五入方法,該方法只固定能可靠固定的部分模糊度,因此控制四舍五入的納偽概率是實現RTK可靠性的關鍵。從含多個備選假設的假設檢驗理論出發,研究納偽概率可控的四舍五入方法,根據風險水平和實數解的質量自適應地確定四舍五入取整區域,從而有效地控制整數固定的納偽概率。并結合GNSS應用中兩種特殊情況,發展兩種簡單實用的應用策略。采用基線長94.6 km的CORS站GPS雙頻數據進行網絡RTK模糊度固定試驗,分析本文納偽概率可控的四舍五入方法的效果。結果表明,納偽概率可控的四舍五入方法的固定率與傳統四舍五入方法的固定率相當,且較傳統方法更能有效地控制納偽概率,提高整數解的可靠性。
實時動態定位;四舍五入;納偽概率;多個備選假設;假設檢驗
1 引 言
整數模糊度固定是實現高精度GNSS應用的前提,整數固定方法包括兩個方面:整數估計準則和整數搜索算法[1]。常用的整數估計準則有四舍五入、Bootstrapping和整數最小二乘(ILS)[2],以及快速模糊度固定的病態正則化準則[1,3-7]。整數搜索算法的實質是通過構造整數不等式約束條件(如整數統計量)快速剔除錯誤的備選模糊度組合[8-14]。
整數模糊度的可靠性是實現高精度GNSS應用的前提,一旦固定錯誤,往往會導致固定解反比實數解差。因此,必須嚴格控制整數解的質量。與實數估計理論不同,整數的離散性使得無法用協方差陣來刻畫它的質量[15],通常采用成功概率,即實數解落入由整數估計準則所確定的整數映射實數子空間的概率[16-21]。值得指出的是,目前為止,所有的整數可靠性理論都是以實數估值無偏為前提,該條件在GNSS應用中很難滿足,因為大氣延遲、多路徑效應等系統誤差影響極其復雜,無法用精確的函數模型表達。事實上,由于這些系統性誤差引起的模糊度錯誤固定也正是模糊度質量控制的關鍵與難點所在。
RTK初始化后只需求解后續觀測引入的新模糊度,未知模糊度向量往往只包含幾個(甚至1個)模糊度。這些模糊度由于觀測幾何強度不同而精度差異較大,不可能同時可靠地固定。而目前廣泛使用的LAMBDA方法只是加快搜索速度,并不能提高固定解的可靠性[22]。因此,RTK模糊度固定通常采用Bootstrapping方法只固定能可靠固定的部分模糊度。Bootstrapping的本質是序貫四舍五入[23],其可靠性依賴于四舍五入的可靠性,因此控制四舍五入的納偽概率是實現RTK可靠性的關鍵。目前,主要有兩種控制四舍五入可靠性的策略。一種策略是給定小數和方差閾值(fixed-fraction-variance,FFV),若實數估值同時滿足小數和方差閾值,則固定;另一種策略則是給定成功概率閾值,若實數解對應的成功概率大于該閾值,則固定。這兩種方法都存在缺陷:第1種方法的閾值很難確定,閾值過大會導致納偽概率增大,過小會降低固定效率,且閾值不隨實數解的質量而變化;第2種方法只考慮實數解的精度,忽略了實數解本身的質量。
本文研究納偽概率可控的四舍五入方法,從含多個備選假設的假設檢驗理論出發,根據風險水平和實數解的質量,自適應地確定實數解的取整區間,從而嚴格地控制整數解的納偽概率,提高固定解的可靠性。此外,結合GNSS應用的兩種特殊情況,發展了兩種簡單實用的應用策略。
2 四舍五入法及其兩類錯誤概率
2.1 四舍五入法與含多個備選假設的假設檢驗
假設GNSS觀測值服從正態分布,則最小二乘實數模糊度估值也服從正態分布~N(a,),其中,a∈Z和分別是的期望和方差。根據整數容許估計的整數平移不變性,平移整數a后的實數模糊度服從正態分布~N(0),對應的概率密度函數為

對于含兩個備選假設(即原假設與備選假設)的假設檢驗問題,拒絕原假設等價于接受備選假設,對應棄真和納偽兩類錯誤。而對于含多個備選假設的假設檢驗問題,拒絕某一備選假設并不意味總是接受另一特定備選假設,而有可能接受另外任一備選假設,因此不存在籠統的棄真和納偽錯誤,只存在相對于某個備選假設的棄真和納偽錯誤。為表述方便,將四舍五入固定解集分為正確固定和錯誤固定兩類,記

式中,Ωz表示固定解z對應的實數空間。采用含兩個備選假設的假設檢驗問題的表述方式,令原假設

將其余所有備選假設籠統歸為備選假設

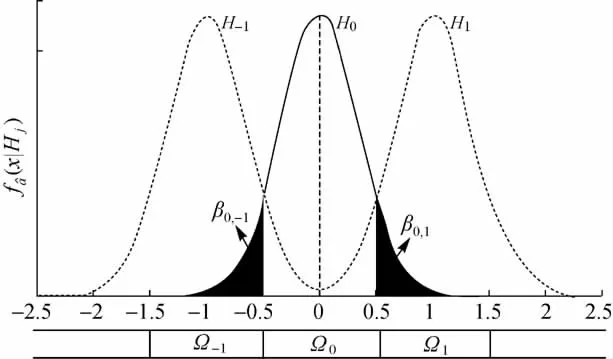
圖1 四舍五入對應的多個備選假設接受域Fig.1 The acceptance regions of multiple hypotheses for integer rounding
圖1給出了四舍五入對應的多個備選假設(H0、H1和H-1)示意圖。令βj,i表示當Hj為真但接受備選假設Hi的錯誤概率,則

根據含多個備選假設的假設檢驗理論,當Hk為真但接受其他備選假設Hi(z∈Z\{k})的概率(即Hk的棄真概率)為

相應的,錯誤地接受Hk的概率(即Hk的納偽概率)為

對應的檢驗功率(即正確接受Hk的概率,也稱為成功概率)為

2.2 四舍五入法的兩類錯誤概率
由似然比檢驗準則得備選假設Hi的接受域為[24]

易證




因此α0≡β0。按式(8)計算正確接受H0的概率(成功概率)為

實際應用中,即使檢驗結果是拒絕原假設H0,也并不接受其他備選假設,而保留實數解。因此,棄真錯誤只影響整數固定的效率;一旦檢驗接受H0,則意味著接受固定解,因此,納偽錯誤相當于采用了錯誤的固定解,必須嚴格控制。由式(12)得出,納偽概率β0與概率密度函數(x)及接受域Ωi有關。
由于傳統四舍五入法的備選假設接受域Ωi=[-0.5,0.5]+i固定,故納偽概率只與實數解的精度有關。換言之,一旦給定了實數估值,四舍五入的納偽概率就唯一確定。受傳統假設檢驗可通過改變拒絕域來調節棄真、納偽概率的思想啟發,本文嘗試改變四舍五入接受域Ωi來嚴格控制納偽概率,提高整數固定的可靠性。
3 納偽概率可控的四舍五入法
3.1 改變四舍五入區間控制納偽概率
設四舍五入取整區間[-0.5,0.5]縮小為[-r,r],0≤r≤0.5,則原假設H0的接受域Ω0變為

備選假設Hi的接受域變為

顯然,Ψi?Ωi且

整數解集對應的實數空間為


圖2給出了縮小取整區間后的多個備選假設H0,H1和H-1對應的接受域示意圖。

圖2 縮小四舍五入區間的多個備選假設對應的接受域Fig.2 The acceptance regions of multiple hypotheses for integer rounding with shrunken region
縮小取整區間后的原假設H0的納偽概率為

比較縮小取整區間前后的納偽概率之差

正確接受H0的概率(成功概率)為

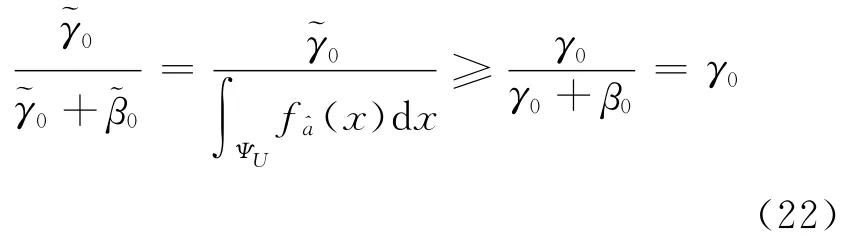
縮小取整區間四舍五入法的本質是通過縮小取整區間,保留那些容易錯誤固定的實數解不固定,從而嚴格控制納偽概率,提高固定解的可靠性。
3.2 四舍五入區間的確定
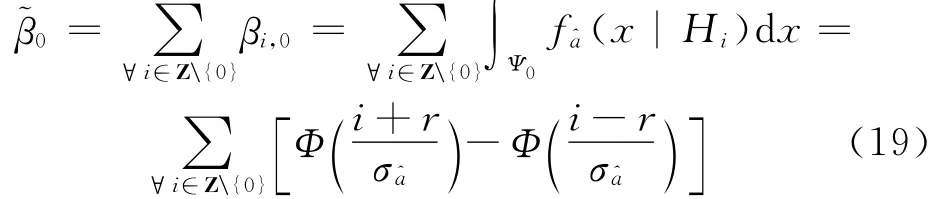
確定合理的取整區間半徑r是提高模糊度固定可靠性的關鍵。r過小,放棄了固定原本能正確固定的模糊度,降低了固定效率;r過大,則不能有效地控制納偽概率。因此,必須在嚴格控制納偽概率的同時自適應地確定r。首先注意到納偽概率的計算涉及無窮個整數概率的累加,實際計算只能取有限個整數,即忽略那些極小概率對應的整數。根據式(19),整數i的絕對值越大,它對的貢獻越小,即?i>j>0,則

給定極小量μ,若整數i0滿足
只需計算小于i0的整數對的貢獻,引入的概率誤差小于μ。圖3給出了在不同的μ下,實數解精度與i0的關系,表明實數解精度越高,需要計算的整數個數越少;即使當實數解精度達到0.5周時,亦只需計算4個整數對應的概率。
確定i0后,納偽概率式(19)簡化為

式中,σ^a由實數估值確定,用戶可設定能承擔的風險水平βmax,根據<βmax確定r。如圖4所示,實線下方區域為當βmax=0.01%時的四舍五入取整區域(下文稱βmax區域)。顯然,r隨著σ^a的增大而減小,即實數解精度越差,要求實數解越接近整數。

圖3 整數個數與模糊度精度及概率誤差閾值μ關系Fig.3 The number of integers versus the ambiguity precisions under the different thresholdsμ
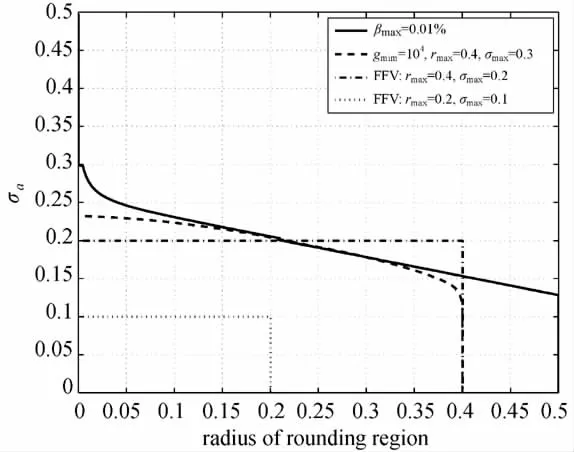
圖4 實數解精度與四舍五入區間半徑的關系Fig.4 Relationship between precision of real-valued estimate and radius of rounding region
3.3 兩種特殊情況的處理
理論上,只要實數估值落入βmax區域就能以小于βmax的納偽概率固定。實際應用存在兩種特殊情況:
(1)實數解精度很高,但小數部分接近0.5,對應βmax區域的右下部分。該情況的發生是由于殘留的系統誤差導致實數解存在偏差。
(2)實數解精度較差,但小數部分接近0,對應βmax區域的左上部分。該情況的發生是由于觀測模型的幾何強度不夠,小數接近0純屬偶然現象。
顯然,這兩種情況都需排除,否則納偽概率依然不能有效控制。本文提出的兩種方法在控制納偽概率的同時,排除兩種特殊情況。
類似于傳統的FFV方法,第1種方法給定實數解的小數和精度限差排除βmax區域內的這兩種特殊情況,該方法的取整區域為

式中,rmax≤0.5和σmax是用戶給定的實數解的小數和精度限差。
另一種方法是通過構造T型函數來排除兩種特殊情況[23],本文給出T型函數廣義形式

考慮到模糊度固定除了控制納偽概率外,還應盡可能地提高模糊度固定效率,構造目標函數

設定rmax、σmax和限差gmin,若實數解滿足g>gmin,則固定。為了有效地控制納偽概率,限差gmin與βmax的取整區域應接近,取gmin=104,rmax=0.4,σmax=0.3,圖4虛線的下方區域為gmin的取整區域,顯然該區域與式(26)確定的取整區域非常接近。
上述公式推導是先根據實數解的精度σ^a和風險水平βmax確定取整區間半徑r,然后比較r與實數解的小數。實際應用可倒過來執行,先直接以實數解的小數作為取整區間半徑r,然后按照式(25)計算納偽概率。若采用第1種方法,判斷實數解是否滿足式(26),滿足則固定,否則保留實數解;若采用第2種方法,還需按式(20)和式(27)計算和T,并按式(28)計算g,若g>gmin,則固定,否則保留實數解。
4 算例分析
采用基線長94.6km的兩個CORS站3h GPS雙頻數據進行網絡RTK模糊度固定試驗,采樣間隔1s,截止高度角10°,采用所有數據正確固定所有模糊度作為后續分析參考值。附寬巷模糊度約束的單歷元電離層加權雙差觀測方程為
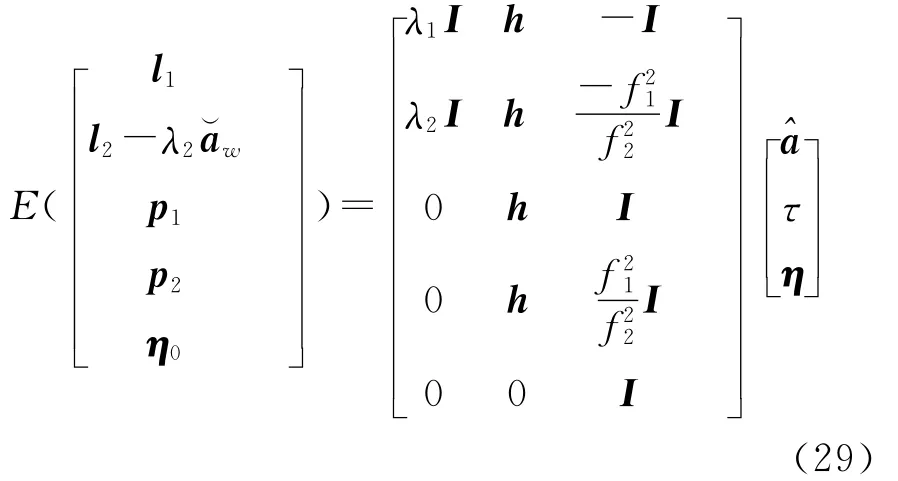
式中,l1、l2、p1和p2分別為經衛地距改正后的L1和L2雙差相位和偽距觀測值;為整數寬巷模糊度為L1雙差模糊度;τ為相對天頂對流層延遲且短時間內不變;h是它的設計矩陣;η是雙差電離層延遲參數;η0為雙差電離層延遲的先驗值,通常取0;I是單位陣,觀測誤差的協方差陣為

式中,σl=5mm和σp=0.5m分別為雙差相位和偽距觀測值的精度;Q為單歷元雙差觀測值的協因數陣;ση=15cm為雙差電離層延遲的先驗精度。采用多歷元數據最小二乘平差計算實數模糊度向量^a及它的協方差矩陣,然后采用Bootstrapping方法按高度角從高到低依次固定模糊度。在四舍五入取整中,比較以下5種方案:
方案1 傳統FFV方法,取閾值rmax=0.2,σmax=0.1,取整區域對應圖4點線的左下方區域。
方案2 傳統FFV方法,取閾值rmax=0.4,σmax=0.2,取整區域對應圖4點劃線左下方區域。
方案3 納偽概率可控的方法但未排除兩種特殊情況,取閾值βmax=0.01%,取整區域對應圖4的實線下方區域(即βmax區域)。
方案4 本文提出的第1種方法,納偽概率可控且結合FFV排除兩種特殊情況,取閾值rmax=0.4,σmax=0.3,取整區域對應式(26)定義的βFFV區域。
方案5 本文提出的第2種方法,納偽概率可控且排除兩種特殊情況,取閾值rmax=0.4,σmax=0.3、gmin=104,取整區域對應圖4虛線左下方區域。
首先采用10個歷元的觀測數據計算得到1500個實數模糊度向量,共計約6200個模糊度。對于每個模糊度向量,采用Bootstrapping方法按高度角從高到低依次固定模糊度,即先固定高度角最高的模糊度,然后假設該模糊度正確固定,采用其參考值改正其余模糊度,然后再固定高度角次高的模糊度,以次類推,固定所有的模糊度。
圖5直觀地展示了納偽概率可控(βmax=0.01%)的取整區域與所有6200個實數模糊度的分布,落入實線區域內的模糊度可以固定,顯然,當實數模糊度接近整數時,可適當放寬對其精度的要求。為了驗證納偽概率可控的四舍五入方法在實際應用中的確能夠嚴格地控制納偽概率,圖6給出了方案2和方案3的固定模糊度對應的納偽概率,方案3的所有固定模糊度的納偽概率都小于0.01%,而方案2有些固定模糊度的納偽概率遠大于0.01%,說明方案2對應的傳統FFV方法不能有效地控制模糊度固定的納偽水平。

圖5 實數模糊度及納偽概率可控(βmax=0.01%)的取整區域Fig.5 The float ambiguities and the error probability controllable acceptance region of integer rounding

圖6 方案2和方案3固定的模糊度對應的納偽概率Fig.6 The error probabilities of the fixed ambiguities with respect to the schemes 2and 3
為了分析不同方案在不同實數解質量下的模糊度固定效果,分別采用3~10個歷元的數據計算實數模糊度,然后采用Bootstrapping方法固定模糊度,再采用不同的四舍五入方案固定模糊度。圖7給出了所有方案采用不同歷元數據的模糊度固定概率,隨著歷元數的增加,模型強度增強,模糊度實數解質量提高,固定概率增大。圖8給出了所有方案采用不同歷元數據固定模糊度的納偽概率,隨著歷元數的增加,納偽概率也有所增大。方案1的取整區域控制過于嚴格,導致固定概率過低,10個歷元的固定概率依然小于5%;當然過于嚴格的取整區域能有效地減小納偽概率,如圖8所示,它的納偽概率始終接近0。方案2能有效地提高固定概率,但納偽概率未能得到有效控制,10個歷元的納偽概率達到1.5%。方案3采用納偽概率可控的四舍五入策略能根據實數模糊度質量調節取整區域,與方案2相比,固定概率提高了4%,但它們的納偽概率相當;尤其當歷元數小于8時,方案3的固定概率大于方案2且納偽概率小于方案2,故方案3比方案2更加合理。

圖7 各種方案不同歷元數據的固定概率Fig.7 The fix-rates versus the number of epochs for the different rounding schemes

圖8 各種方案不同歷元數據的錯誤固定概率Fig.8 The error probabilities of the fixed ambiguities for the different rounding schemes
理論上,方案3的納偽概率統計意義上應該小于風險水平βmax=0.01%,而實際結果卻遠大于βmax(如圖8所示),原因是方案3以實數模糊度估值無偏為理論基礎,而未考慮本文提到的實際應用中的兩種特殊情況,因此,采用本文提出的兩種四舍五入方法(即方案4和方案5)有望較方案3減小納偽概率。比較方案4與方案3,它們的固定概率相當,但方案4的納偽概率比方案3減小約一倍。比較方案5與方案3,由于方案5的取整區域更加嚴格(參考圖4),固定概率較方案3有所減小(相對減小22.8%),但方案5的確能更加嚴格地控制納偽概率,納偽概率從1.5%減小到0.2%(相對減小86.7%)。因此,在實際應用中,若可承受適當放寬的納偽概率,可采用本文提出的第1種四舍五入方法得到高的固定概率(即試驗方案4);若傾向于嚴格控制納偽概率,可采用本文提出的第2種四舍五入方法(即試驗方案5)。
5 結 論
RTK模糊度固定通常采用序貫四舍五入法固定只能可靠固定的部分模糊度,其可靠性依賴于四舍五入法的可靠性。而目前采用的FFV和給定成功概率閾值的策略都存在理論或者應用上的缺陷。本文提出了根據風險水平和實數解質量自適應確定四舍五入取整區間從而控制納偽概率的方法,并結合GNSS應用中的兩種特殊情況,提出了兩種簡單實用的四舍五入取整方案。研究表明:① 縮小四舍五入取整區間的本質是放棄固定容易錯誤固定的實數解,從而嚴格控制了納偽概率,提高了固定解的可靠性;②傳統FFV策略很難確定合理的閾值,閾值過小,雖能嚴格控制納偽概率但其固定效率過低,閾值過大,雖能提高固定效率,但納偽概率不能有效控制;③ 采用納偽概率可控的四舍五入法,若不考慮實際應用中的兩種特殊情況,納偽概率依然不能有效控制;④采用本文提出的第1種方法,即控制納偽概率同時給定實數解的小數和精度閾值排除兩種特殊情況,能有效地控制納偽概率且保持高的固定概率;⑤ 采用本文提出的第2種方法,即采用目標函數g,能以固定概率的略微減小換來納偽概率的嚴格控制。因此,在實際應用中,若可容忍略微放寬的納偽概率(如常規RTK),可采用本文提出的第1種方法獲得高的固定概率;若傾向于嚴格控制納偽概率(如網絡RTK),可采用本文提出的第2種方法。
[1] LI Bofeng,FENG Yanming,SHEN Yunzhong.Extended GNSS Ambiguity Resolution Models with Regularization Criterion and Constraints[J].Journal of Global Positioning Systems,2009,8(2):149-154.
[2] TEUNISSEN P.An Optimality Property of the Integer Least-squares Estimator[J].Journal of Geodesy,1999,73:587-593.
[3] OU Jikun,WANG Zhenjie.An Improved Regularization Method to Resolve Integer Ambiguity in Rapid Positioning Using Single Frequency GPS Receivers[J].Chinese Science Bulletin,49(2),196-200.(歐吉坤,王振杰.單頻GPS快速定位中模糊度解算的一種新方法[J].科學通報,2004,49(2):196-200.)
[4] GUI Qingming,HAN Songhui.New Algorithm of GPS Rapid Positioning Based on Double-k-type Ridge Estimation[J].Journal of Surveying Engineering,2007,133(4):173-178.
[5] LI Bofeng,SHEN Yunzhong.Prior Baseline Information Based Fast GPS Ambiguity Resolution[J].Acta Geodaetica et Cartographica Sinica,2008,37(4):413-417.(李博峰,沈云中.顧及基線先驗信息的GPS模糊度快速解算[J].測繪學報,2008,37(4):413-417.)
[6] SHEN Yunzhong,LI Bofeng.Regularized Solution to Fast GPS Ambiguity Resolution[J].Journal of Surveying Engineering,2007,133(4):168-172.
[7] LI Bofeng,SHEN Yunzhong,FENG Yanming.Fast GNSS Ambiguity Resolution as an Ill-posed Problem[J].Journal of Geodesy,2010,84:683-698.
[8] FREI E,BEULTER G.Rapid Static Positioning Based on the Fast Ambiguity Resolution Approach‘FARA’:Theory and First Results[J].Manuscript Geodesy,1990,15:326-356.
[9] HATCH R.Instantaneous Ambiguity Resolution[C]∥Proceedings of KIS’90.Banff:[s.n.],1990:299-308.
[10] PARK C,KIM I,LEE J,et al.Efficient Ambiguity Resolution Using Constraint Equation[C]∥Proceedings of IEEE Position Location and Navigation Symposium.Atlanta:IEEE,1996:277-284.
[11] LI Bofeng,SHEN Yunzhong.Global Navigation Satellite System Ambiguity Resolution with Constraints from Normal Equations[J].Journal of Surveying Engineering,2010,136(2):63-71.
[12] EULER H,LANDAU H.Fast Ambiguity Resolution On-The-Fly for Real-Time Applications[C]∥Proceeding of 6th International Geodetic Symposia on Satellite Positioning.Columbus:[s.n.],1992:650-659.
[13] LI Bofeng,SHEN Yunzhong.An Improved ARCE Algorithm for GPS Ambiguity Resolution[J].Journal of Geodesy and Geodynamics,2006,26(3):102-105.(李博峰,沈云中.改進的ARCE算法[J].大地測量與地球動力學,2006,26(3):102-105.)
[14] LI Bofeng,SHEN Yunzhong.Fast GPS Ambiguity Resolution Constraint to Available Conditions[J].Geomatics and Information Science of Wuhan University,2009,34(1):117-121.(李博峰,沈云中.附有約束條件的GPS模糊度快速解算[J].武漢大學學報:信息科學版,2009,34(1):117-121.)
[15] LI Bofeng.Theory and Method of Parameter Estimation for Mixed Integer GNSS Stochastic and Function Model[D].Shanghai:Tongji University,2010.(李博峰.混合整數GNSS函數模型和隨機模型參數估計理論與方法[D].上海:同濟大學,2010.)
[16] HASSIBI A,BOYD S.Integer Parameter Estimation in Linear Models with Applications to GPS[J].IEEE Transactions on Signal Processing,1998,46(11):2938-2952.
[17] TEUNISSEN P.Success Probability of Integer GPS Ambiguity Rounding and Bootstrapping[J].Journal of Geodesy,1998,72:606-612.
[18] TEUNISSEN P.The Parameter Distributions of the Integer GPS Model[J].Journal of Geodesy,2002,76:41-48.
[19] VERHAGEN S.The GNSS Integer Ambiguities:Estimation and Validation[D].Delft:Delft University of Technology,2005.
[20] XU Peiliang.Voronoi Cells,Probabilistic Bounds and Hypothesis Testing in Mixed Integer Linear Models[J].IEEE Transaction Information Theory,2004,52(2):3122-3138.
[21] ZHU L,LAI Y,SHAH M,et al.Efficiency of Carrierphase Integer Ambiguity Resolution for Precise GPS Positioning in Noisy Environments[J].Journal of Geodesy,2007,81:149-156.
[22] DE JONGE P,TIBERIUS C.The LAMBDA Method for Integer Ambiguity Estimation:Implementation Aspects[R].Delft:Delft Geodetic Computing Centre,1996.
[23] DONG D,BOCK Y.Global Positioning System Network Analysis with Phase Ambiguity Resolution Applied to Crustal Deformation Studies in California[J].Journal of Geophysical Research,1989,94:3949-3966.
[24] TEUNISSEN P,SIMONS D,TIBERIUS C.Probability and Observation Theory[R].Delft:Delft University of Technology,2008.
E-mail:bofeng_li@163.com
Error Probability Controllable Integer Rounding Method and Its Application to RTK Ambiguity Resolution
LI Bofeng1,SHEN Yunzhong2,ZHANG Xingfu3
1.Key Laboratory of Advanced Surveying Engineering of SBSM,Tongji University,Shanghai 200092,China;2.College of Surveying and Geo-informatics,Tongji University,Shanghai 200092,China;3.Department of Surveying and Geomatics,Guangzhou University of Technology,Guangzhou 510006,China
RTK ambiguity resolution is usually preferable to sequential rounding method to partially fix the ambiguities that can be fixed with high reliability.Hence,it is crucial to control the error probability of rounding.The issue of reliable rounding based on the theory of multiple hypothesis testing will be addressed,where the rounding interval is adaptively determined in terms of the user-defined critical level to tightly control the error probability of ambiguity fixing.Furthermore,regarding to the two special scenarios in real GNSS applications,two easy-to-use rounding strategies are developed.The dual-frequency GPS data collected from two CORS stations of 94.6 km baseline is carried out as a network RTK ambiguity resolution instance to evaluate the performance of the proposed new rounding strategies.The results show that,comparing with the ordinary rounding strategies,the new rounding strategies can indeed control error probability of ambiguity fixing whilst keeping the moderate fix-rate.
RTK;integer rounding;type II error;multiple hypotheses;hypothesis testing
LI Bofeng(1983—),male,postdoctoral fellow,majors in geodetic data processing theory,GNSS theory and applications.
LI Bofeng,SHEN Yunzhong,ZHANG Xingfu.Error Probability Controllable Integer Rounding Method and Its Application to RTK Ambiguity Resolution[J].Acta Geodaetica et Cartographica Sinica,2012,41(4):483-489.(李博峰,沈云中,張興福.納偽概率可控的四舍五入法及其在RTK模糊度固定中的應用[J].測繪學報,2012,41(4):483-489.)
P228
A
1001-1595(2012)04-0483-07
國家自然科學基金(41074018;41104002)
宋啟凡)
2011-09-29
2011-12-06
李博峰(1983—),男,博士后,研究方向為大地測量數據處理理論,GNSS理論與應用。
猜你喜歡
今日農業(2021年9期)2021-11-26 07:41:24
發明與創新·小學生(2021年3期)2021-03-25 11:48:49
兒童故事畫報(2019年5期)2019-05-26 14:26:14
意林原創版(2016年10期)2016-11-25 10:28:30
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56