探空火箭有效載荷集成測試軟件系統的設計與實現①
2012-08-31 06:04:14陳志敏姜秀杰
固體火箭技術 2012年6期
關鍵詞:系統
陳志敏,陳 萍,姜秀杰,劉 波
(1.中國科學院空間科學與應用研究中心,北京 100190;2.中國科學院研究生院,北京 100049)
0 引言
國家重大科技基礎設施項目——東半球空間環境地基綜合監測子午鏈(簡稱子午工程)首枚探空火箭于2011年5月7日7時在中國科學院海南探空部發射場成功發射,其運載部分為航天四院定型產品天鷹3號C型火箭,有效載荷部分為中科院空間中心研制的鯤鵬一號探空儀[1]。為確認箭載有效載荷的各項性能和功能是否滿足需求,箭載有效載荷在研制過程中自始至終都離不開大量的測試工作,在測試中獲取定性、定量數據,并進行處理和評定都需要集成測試軟件的支持。因此,具有較好適應性和可靠性的集成測試軟件系統是有效載荷研制過程中的重要組成部分[2]。
目前國外探空火箭有效載荷系統由于應用廣、需求大,測試工作發展較好,如美國NASA的Improved Orion和 Terrier Malemute系統探空火箭采用的CDMS載荷監測系統[3],歐洲ESA的Texus和Maxus系列探空火箭采用的DELTA數據實時處理系統,加拿大CSA的Black Brant系列探空火箭使用的地面載荷環境模擬測試系統。這些測試系統采用先進的載荷監測技術,同時都使用了分布式組網,既方便了載荷研制人員的測試工作,又節約了大量人力。國內探空火箭有效載荷系統因需求和商品化等問題在20世紀80~90年代經歷了一個低潮期,發展近乎停滯,現有最近的資料是1988年由中科院空間科學與應用研究中心為織女系列探空火箭研制的一套在IBM-AT機上實時處理有效載荷數據的監測軟件,時間久遠,技術上已經與國外同行有較大差距。近年來,隨著“子午工程”等科學探測項目的展開,探空火箭作為臨近空間40~300 km唯一的實地探測工具又重新引起人們的重視,因此為滿足新的探測任務需要,開發新的用于探空火箭有效載荷測試的軟件系統意義重大。
本文結合探空火箭有效載荷地面試驗的特點,論述了其測試軟件系統的關鍵技術點,為類似系統的研制提供借鑒。
1 系統總體架構
探空火箭有效載荷集成測試系統的主要功能是為探空火箭在完成發射任務前所需進行的各類試驗(振動實驗、溫度循環實驗等)提供支持,主要包括對箭載設備試驗數據的接收與處理、模擬發射過程中的各項指令及相應的錯誤記錄。
根據載荷數據在試驗過程中的數據下行方式不同,試驗過程可分為有線接收與無線接收兩種模式(進入發射場后無線模式略有不同)。探空火箭有效載荷集成測試系統的主要硬件架構見圖1。
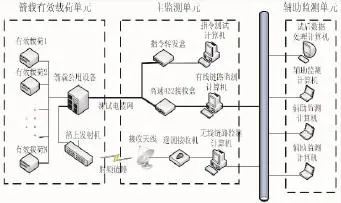
圖1 探空火箭有效載荷集成測試硬件系統Fig.1 Sounding rocket payload integration testing hardware systems
(1)箭載有效載荷單元:主要包括探空火箭所搭載的各類儀器設備,一般根據不同的試驗項目,放置在不同試驗平臺上。
(2)主監測單元:主監測單元主要接收來自箭載有效載荷單元的載荷數據,進行處理和顯示;根據試驗項目需要,向箭載有效載荷單元發送指令,模擬火箭發射各階段系統狀態;此外,主監測單元將通過網絡向輔助監測單元發送數據。
(3)輔助監測單元:輔助監測單元通過局域網從主監測單元接收試驗數據,提供給載荷研究人員進行觀測,并在試驗結束后對試驗數據進行分包等處理。
探空火箭有效載荷集成測試系統軟件部分以有效載荷監測服務器與有效載荷監測客戶終端為核心,實現對試驗數據的處理與觀測。此外,還包括指令轉發軟件和試后數據處理共4個軟件。其下行數據采用CCSDS標準格式,箭載公用設備將各載荷數據按該標準進行打包發送,集成測試軟件遵照該標準設計對數據進行處理,并完成對有效載荷下行數據的差錯檢測與恢復,供研制人員進行分析。
2 關鍵技術
2.1 監測服務器軟件的分層設計
圖1中無線/有線鏈路監測計算機上的有效載荷監測服務器軟件是整個測試軟件系統的核心,其按照軟件功能分層設計的思想共分4層[4],各層功能模塊和數據流(箭頭表示數據流方向)如圖2所示。

圖2 有效載荷監測服務器軟件模塊結構圖Fig.2 Block diagram of the payload monitoring server software
為提高軟件運行效率,采用多線程設計,各層為獨立線程,層間采用循環緩沖區進行數據交換。
2.2 解模糊算法
正式的探空火箭遙測設備體積龐大,箭載載荷集成測試時無法進入試驗場所,因此實際測試時往往采用簡易的無線接收設備。這樣的設備雖然輕便簡單,但功能有限,不具備解模糊功能,因此本集成測試軟件系統提出了一種動態解模糊的算法,通過軟件解模糊,以支持載荷設備的無線接收測試。
大部分探空火箭無線數據鏈路采用的是BPSK方式,BPSK是種常用的調制解調技術,而相位模糊問題一直是其實現解調中的關鍵問題之一,相位模糊問題直接影響到探空火箭射頻無線鏈路所收到的數據質量,然而根據文獻[5],在通信信號恢復過程中BPSK必將產生相位模糊。相位模糊將直接導致無線鏈路收到的探空火箭有效載荷數據出現比特位翻轉的現象,即接收到的字節數據變為反碼,例如下傳數據幀原本的16進制同步頭“1ACFFC1D”變為“E53003E2”。實際測試過程中,由于環境及人為等因素,一次試驗過程(如振動試驗)經常出現多次正反碼翻轉,影響到接收數據的準確性,解決該問題的常規方法是對下傳數據進行差分編碼,但為了不提高硬件測試成本和箭載有效載荷設備的復雜度,本次探空火箭有效載荷測試系統在監測服務器端采用一種軟件算法來動態地跟蹤數據正反碼的變化,進而對接收到的反碼數據進行取反處理,從而得到正確數據,達到解模糊的目的。
該算法在數據校驗層的解模糊模塊中進行,其原理是:利用下傳數據幀中至少同步碼(1ACFFC1D)是固定不變的這一特點,通過在接收到的數據中等間隔地抽取部分數據進行簡易的同步碼檢測,如其中發現是反碼同步碼(E53003E2),則認為所接收到的數據是反碼,對其進行取反運算,如果沒有則為正碼,不做處理。解模糊模塊的功能是盡可能多地糾正由相位模糊造成的反碼數據,本身不進行有效數據的選擇,無論數據中是否有正/反同步碼,解模糊處理后的數據一律送入緩沖區,再由后面的同步碼檢測模塊統一進行完整的正同步碼“1ACFFC1D”的檢測,該模塊會將解模糊后仍錯誤的數據做丟棄處理,保留有效數據。解模糊算法流程如圖3所示。

圖3 動態解模糊算法流程圖Fig.3 The flowchart of dynamic defuzzification algorithm
在實際集成測試試驗過程中,該算法在軟件層面實現對相位模糊的動態跟蹤簡單有效,從而對數據進行修正處理。該算法采用抽樣檢測方式,因此在算法效率上也有非常好的實時性。以本次箭載有效載荷雙探針電場儀為例,在進行隨機振動測試時,采集的數據波形曲線如圖4所示。

圖4 電場儀數據波形圖Fig.4 Electric field instrument data waveform
由于振動測試時,存在人員的走動等干擾因素,圖4中未進行解模糊處理時,干擾造成2次明顯的采集過程中斷;進行解模糊處理后,糾正了干擾造成的模糊,獲得了更多的有效數據,數據采集過程無明顯中斷。
2.3 IP組播通信技術
探空火箭有效載荷在集成測試時,還應為載荷研制人員提供獨立的有效載荷監測客戶終端軟件,便于研制人員各自觀測載荷設備,提高試驗效率。
與一般儀器的測試試驗不同,探空火箭有效載荷的集成試驗具有待測儀器種類多、數據量大、實時性高的特點,如果采用傳統的TCP或UDP點對點通信方式,在“一對多”的情況下(如B/S或C/S架構),對服務器的數據吞吐量和服務器的計算負荷都較大。以本次探空火箭發射任務為例,探空火箭有效載荷數據下行速率為2 Mb/s,共有7臺有效載荷,若所有研制人員參試,至少需要7臺有效載荷監測客戶終端,如果采用傳統點對點的UDP或TCP,那么要求服務器數據轉發能力至少是7×2=14 Mb/s,已超過普通10 M網卡的上限,因此在不提高硬件成本和軟件復雜度的條件下,采用IP組播技術,實現圖1中主監測單元和輔助監測單元之間的數據通信。IP組播技術雖然基于UDP協議,但利用IP組播技術服務器只需發送1次,數據包僅在傳輸路徑分岔時由路由器復制并轉發,實現“一次發送,多點接收”,IP組播的這種傳輸機制,使其在面向多個數據接收者時,能夠有效降低發送主機的負荷、節省網絡帶寬、提高傳輸效率[6]。
在實際測試中,監測服務器軟件將待發送的數據進行分片,保證每片為512個字節,然后再通過IP組播進行發送,能獲得更好的傳輸效果。這是因為根據現有網絡協議,局域網中IP協議中可能的最小MTU(最大傳輸單元)為X.25協議576個字節,如果1次發送的組播數據過大,由于組播是不可靠傳輸,可能導致單個組播數據包由于IP分片的數據丟失,而使整個數據包失效。如果發送前進行分片,可以保證一個組播數據包為一個IP分片,將數據丟失影響控制在較小范圍內,提高傳輸成功率。為比較傳輸效果,在局域網內,采用分片、不分片方式分別進行數據發送測試,在3種傳輸速率(1、3、10 Mb/s)下,經過60 s時長測試,測試結果如表1所示。

表1 未分片與分片IP組播表Table 1 IP multicast data table of unslice and slice
2.4 RS 譯碼
探空火箭在測試和發射過程中,由于環境干擾和天線波瓣臨界區等原因,會使射頻無線鏈路下傳的數據產生錯誤,為盡可能多地還原下傳數據,根據CCSDS標準,探空火箭有效載荷下傳數據采用RS編譯碼進行糾錯。因箭載有效載荷測試過程硬件條件有限,目前所采用的集成測試遙測接收機還不具備RS譯碼能力,所以在有效載荷監測服務器中加入RS軟件譯碼功能。按照CCSDS標準,探空火箭采用RS(255,223)碼,交織深度為2,主要譯碼步驟如下:
(1)將512字節的下行數據幀進行解交織;
(2)由解交織后的2個編碼數組各自計算出伴隨式 S=(S1,S2,…,S2t);
(3)由伴隨式S求錯誤位置多項式σ(x),錯誤位置多項式的根提供錯誤的位置;
(4)用錢搜索解出σ(x)的根,得到錯誤位置數,確定出錯位置;
(5)由錯誤位置數求得錯誤值,從而得到錯誤圖樣E(x),由R(x)-E(x)得到最可能發送的碼字C(x),完成譯碼。
其中步驟(3)是關鍵,求解 σ(x)的關鍵方程:S(x)σ(x)≡ω(x)(modx2t+1),如果錯誤個數 t較大時,用展開關鍵方程兩邊的方法求σ(x)會很繁瑣。所以,采用BM迭代方法來解關鍵方程。迭代算法分4步執行[7]。具體程序算法流程如圖5所示。

圖5 求解RS譯碼關鍵方程流程圖Fig.5 The flowchart of RS decoder key equation
上述流程在 RS(255,223)碼時,t=16。
以載荷系統進行的隨機振動試驗為例,由于鑒定級試驗未采用RS譯碼,導致了較高的誤碼率,而驗收級試驗采用了RS譯碼,使得誤碼率大為降低,具體試驗數據見表2。

表2 RS譯碼效果Table 2 RS decoding effect
2.5 USB接口數據通信
以往國內探空火箭有效載荷測試系統的數據采集系統一般通過RS232、PXI和GPIB等接口標準與上位機進行數據交換,這些接口有些速率較低無法滿足新的箭載載荷的需求,有些需要板卡插入計算機主板中,接插不便。USB作為一種通用的接口標準,具有傳輸速率高、接插方便(即插即用)等優點,適合載荷測試系統的數據采集。
探空火箭有效載荷在各項測試試驗中需要對公用設備輸入特定指令,以模擬火箭發射的過程,例如本系統在主監測單元中加入指令發送終端,該終端采用USB接口實現指令的發送和接收。此外,指令盒與422接收盒一樣都采用cypress的USB芯片(型號為68013)與服務器進行通信。但在測試過程中發現,由于探空火箭數據下行速率大(2 Mb/s),如果上位機軟件采用普通的循環接收方式,每隔一段時間會出現丟數現象,為此采用循環隊列數據采集方式進行采集。該方式與循環接收方式不同點在于,它事先發出一定數量的采集IO指令,然后再進行采集,而不是等到采集完再發送IO指令。該方法使得數據采集的可靠性大大提高,經過96 h的常溫老練試驗,該接收方式運行穩定,未出現數據丟失。
2.6 主要程序界面設計
探空火箭有效載荷集成測試現場環境比較復雜,因此在界面設計上力求直觀簡單,方便測試人員的操作,防止由于人員的誤操作導致試驗的失敗。本系統采用C#編程在界面設計上更加美觀,如圖6、圖7所示。

圖6 有效載荷監測服務器Fig.6 Payload monitoring server

圖7 指令轉發軟件Fig.7 Instruction software
3 結束語
探空火箭有效載荷系統需要進行隨機振動、常溫老練和溫度循環等地面試驗,有效載荷集成測試軟件在各項試驗中運行穩定可靠,具有較好的數據分析與處理能力,為研制人員完成測試任務提供了支持。該軟件系統相對于國內以前的探空火箭有效載荷集成測試軟件有以下優點:
(1)軟件支持載荷系統的無線接收模式,具有動態解模糊的能力;
(2)采用組播技術,便于設備研制人員監測試驗過程;
(3)軟件支持載荷數據采集設備的USB接口,相對于以往類似系統采用的RS232、PXI和GPIB接口,更加靈活方便;
(4)采用了軟件方法進行RS譯碼,軟件系統糾錯能力更高;
(5)采用新的.net架構編程,該軟件系統在分層設計和界面可視化等方面較之前的探空火箭項目(如織女系列)所使用的有效載荷集成測試軟件有了較大提高。
[1]姜秀杰,劉波,等.探空火箭的發展現狀及趨勢[J].科技導報,2009,12(23):101-110.
[2]陳萍,姜秀杰.基于FPGA的CAN總線通信系統[J].計算機測量與控制,2009,17(12):2482-2484.
[3]Sounding Rockets Program Office.NASA sounding rocket program handbook[M].2005.
[4]梁國柱,張衛華,郭紅杰,等.固體火箭發動機集成方案設計系統 SRMCAD[J].固體火箭技術,2003,26(3):18-20.
[5]姚彥,梅順良,高葆新.數字微波中繼通信工程[M].北京:人民郵電出版社,1988.
[6]張景峰,鄒澎濤.C#中實現IP組播的關鍵技術[J].電腦開發與應用,2007,20(9):67-69.
[7]王新梅,肖國鎮.糾錯碼——原理與方法[M].西安:西安電子科技大學出版社,2001.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
