基于綜合相關(guān)判別的無源航跡關(guān)聯(lián)算法
2012-08-27 13:13:26馮新喜劉玉磊
電光與控制 2012年10期
關(guān)鍵詞:關(guān)聯(lián)
劉 釗,馮新喜, 周 航,劉玉磊
(空軍工程大學(xué)信息與導(dǎo)航學(xué)院,西安 710077)
0 引言
如何判斷來自于兩個不同局部節(jié)點的兩條航跡是否代表同一個目標(biāo),是分布式無源多目標(biāo)跟蹤系統(tǒng)的一個重要問題,即航跡與航跡的關(guān)聯(lián)問題,簡稱航跡關(guān)聯(lián)或者航跡相關(guān)問題。對于無源傳感器,由于其所探測的每個航跡只對應(yīng)一個輻射源,而一個目標(biāo)平臺可以裝載多個輻射源,因此,如何利用輻射源航跡進(jìn)行航跡關(guān)聯(lián),并最終得到正確的目標(biāo)關(guān)聯(lián)航跡就是難點所在。目前用于航跡關(guān)聯(lián)的算法通常可分為兩類[1-3]:一類是基于統(tǒng)計的方法;另一類是基于模糊數(shù)學(xué)的方法。這些方法都只利用了目標(biāo)的運(yùn)動狀態(tài)信息。事實上,無源傳感器不僅僅獲取這些信息,還可以獲得更多關(guān)于目標(biāo)的其他特征數(shù)據(jù)(如載頻、脈寬、脈幅、到達(dá)時間等)[4-5]。關(guān)于如何利用這些信息和運(yùn)動狀態(tài)信息綜合來提高分布式無源多目標(biāo)系統(tǒng)的航跡關(guān)聯(lián)性能,文獻(xiàn)報道上不多見。在此借鑒了文獻(xiàn)[6]的思想后將其運(yùn)用于無源傳感器航跡關(guān)聯(lián)上,提出了一種基于綜合相關(guān)判別的無源航跡關(guān)聯(lián)新方法,即首先利用一個節(jié)點獲得的綜合信息,對來自于一個目標(biāo)平臺的輻射源航跡進(jìn)行節(jié)點內(nèi)部的自關(guān)聯(lián),再利用自關(guān)聯(lián)后的結(jié)果進(jìn)行兩個節(jié)點之間航跡互關(guān)聯(lián)的同時,充分利用無源傳感器獲取的角度和屬性信息建立判別函數(shù),通過關(guān)聯(lián)判決規(guī)則進(jìn)行航跡關(guān)聯(lián)。該算法依據(jù)分布的思想對航跡進(jìn)行關(guān)聯(lián),并引進(jìn)了傳感器獲得的其他特征數(shù)據(jù),從而使計算量大大減少,并提高了計算精度。
1 問題描述
令 N1={1,2,…,n1},N2={1,2,…,n2}分別為節(jié)點1和節(jié)點2的航跡編號集合,多無源傳感器對目標(biāo)進(jìn)行聯(lián)合探測可以有效提高目標(biāo)的定位精度,獲取目標(biāo)的精確位置信息和屬性信息。輻射源探測模型如圖1所示。

圖1 輻射源探測模型Fig.1 Radiant point exploring model
多無源傳感器航跡關(guān)聯(lián)的內(nèi)容包括:
1)判定一個節(jié)點探測到的多個輻射源航跡是否屬于同一目標(biāo)平臺;
2)判定兩個節(jié)點在各自節(jié)點內(nèi)部進(jìn)行自關(guān)聯(lián)后,所得到的目標(biāo)航跡是否屬于同一目標(biāo)平臺。
內(nèi)容1)屬于一個節(jié)點內(nèi)部的航跡關(guān)聯(lián)問題;內(nèi)容2)屬于多無源傳感器之間的航跡互關(guān)聯(lián)問題。無源傳感器可以獲得輻射源的方位角、俯仰角和豐富的參數(shù)信息。通過以上這兩步對航跡進(jìn)行自關(guān)聯(lián)和互關(guān)聯(lián),可以實現(xiàn)多無源傳感器之間的航跡關(guān)聯(lián)。
2 多無源傳感器關(guān)聯(lián)算法分析
2.1 一節(jié)點內(nèi)部航跡自關(guān)聯(lián)判別函數(shù)
對于一個節(jié)點內(nèi)部的輻射源航跡關(guān)聯(lián),在判別函數(shù)的選取時要充分利用探測到的方位角、俯仰角和輻射源屬性信息相結(jié)合進(jìn)行數(shù)據(jù)關(guān)聯(lián),這樣才能提高航跡自關(guān)聯(lián)的精度。
1)角度信息相關(guān)判別函數(shù)。
設(shè):θej(li)、αej(li)分別為第 j條航跡的第 li個俯仰角和方位角測量值;θek(li)、αek(li)分別為第k條航跡的第li個俯仰角和方位角測量值;θi=θej(li)-θek(li),表示第j條航跡的第li個俯仰角和第k條航跡的第li個俯仰角之差;αi=αej(li)-αek(li),表示第 j條航跡的第li個方位角和第k條航跡的第li個方位角之差。對一個節(jié)點的內(nèi)部航跡進(jìn)行自關(guān)聯(lián),其俯仰角和方位角測量誤差相同,服從零均值恒定方差的高斯分布,其方差表示為σe,構(gòu)造統(tǒng)計量為


顯然,當(dāng)?shù)趈條輻射源航跡與第k條輻射源航跡來源于同一目標(biāo)平臺時,Δθ和Δα都服從均值為0、方差為1的標(biāo)準(zhǔn)正態(tài)的抽取子樣[1],且滿足一般相似性測量的性質(zhì),故將其定義為基于一節(jié)點內(nèi)部航跡的俯仰角和方位角相關(guān)判別函數(shù)。
2)屬性相關(guān)判別函數(shù)。


式中:pij表示第j條航跡上的第i個屬性信息;pie表示第e條航跡上的第i個屬性信息。式(3)滿足一般相似性測量的性質(zhì),故將其定義為基于一節(jié)點內(nèi)部航跡的屬性相關(guān)判別函數(shù)。
3)綜合相關(guān)判別函數(shù)。
由式(1)~式(3)所得到的表達(dá)式均服從正態(tài)分布且相互獨立,將其綜合可以得到

上式服從χ2(n+1)分布,其維數(shù)為俯仰角一維,方位角一維,加上屬性信息多維構(gòu)成。
2.2 一節(jié)點內(nèi)部航跡自關(guān)聯(lián)判決規(guī)則
當(dāng)計算出了描述兩航跡近似程度的綜合相關(guān)判別值之后,下一步就是如何判決兩航跡間的相似性。為了給出航跡i(i∈N1)與航跡 j(j∈N1)間的相似性判決,將相似度從大到小排序,采用最大判別值識別原則。即若γj*=max(γj),且γj*>ε,則在t時刻的航跡i(i∈N1)與航跡 j(j∈N1)關(guān)聯(lián)。ε 為閥值參數(shù),0.5≤ε<1,可以通過仿真試驗確定該值的大小。
為了控制航跡關(guān)聯(lián)檢驗的完結(jié)與終止,可進(jìn)一步引入航跡關(guān)聯(lián)質(zhì)量mij(k)。關(guān)聯(lián)質(zhì)量是關(guān)于航跡關(guān)聯(lián)歷史情況的度量,其值的大小反映正確關(guān)聯(lián)的可靠程度[8]。若在 t時刻判決航跡 i(i∈N1)與航跡 j(j∈N1)為關(guān)聯(lián)對,則

否則

式中,mij(0)=0。如果在t時刻航跡i(i∈N1)與航跡j(j∈N1)第一次關(guān)聯(lián),mij(t-1)=0,mij(t)=1。為了減少計算量,提高算法的運(yùn)算速度,當(dāng)mij≥6時,可以規(guī)定航跡i(i∈N1)與航跡j(j∈N1)為固定關(guān)聯(lián)對,并且在后續(xù)的檢驗中,它們不再接受關(guān)聯(lián)檢驗,直接進(jìn)入航跡合成階段。
通過上述的關(guān)聯(lián)判別規(guī)則,可以將一個節(jié)點內(nèi)部的來自于同一目標(biāo)平臺的輻射源航跡進(jìn)行關(guān)聯(lián),為了在第二步中的兩個不同節(jié)點間航跡關(guān)聯(lián),對在一個節(jié)點內(nèi)部的確定為來自同一目標(biāo)平臺的輻射源航跡進(jìn)行去均值處理,使其合成為一條航跡,反映一個目標(biāo)平臺的運(yùn)動。

式中,mi為合成后的第i個目標(biāo)平臺的航跡。
2.3 兩節(jié)點間航跡互關(guān)聯(lián)判別函數(shù)
在對每個節(jié)點內(nèi)部屬于一個目標(biāo)平臺的輻射源航跡進(jìn)行關(guān)聯(lián)后,每個節(jié)點得到了自己節(jié)點探測到的目標(biāo)航跡,下面的步驟就是要對兩個節(jié)點得到的目標(biāo)航跡進(jìn)行互關(guān)聯(lián),最后獲得多無源傳感器的航跡關(guān)聯(lián)結(jié)果。
1)角度信息相關(guān)判別函數(shù)。
設(shè) θdej(li)、αdej(li)為第 d 個節(jié)點(d=1,2)的第 j條航跡的第li個俯仰角和方位角測量值;θpek(li)、αpek(li)為第p個節(jié)點(p=1,2)的第k條航跡的第li個俯仰角和方位角測量值;θdpi=θdej(li)-θpek(li)表示第d個節(jié)點的第j條航跡的第li個俯仰角和第p個節(jié)點的第k條航跡的第li個俯仰角之差;αdpi=αdej(li)-αpek(li)表示第d個節(jié)點的第j條航跡的第li個方位角和第p個節(jié)點的第k條航跡的第li個方位角之差,對兩個節(jié)點的航跡進(jìn)行互關(guān)聯(lián),其方位和俯仰測量誤差相對獨立,均服從零均值恒定方差的高斯分布[1],方差表示為σe和σp,構(gòu)造統(tǒng)計量為

顯然,當(dāng)?shù)赿個節(jié)點的第j條目標(biāo)平臺航跡與第p個節(jié)點的第k條目標(biāo)平臺航跡來源于同一目標(biāo)平臺時,Δθh和Δαh都服從均值為0、方差為1的標(biāo)準(zhǔn)正態(tài)的抽取子樣,且滿足一般相似性測量的性質(zhì),故將其定義為基于兩節(jié)點目標(biāo)航跡的俯仰角和方位角相關(guān)判別函數(shù)。
2)屬性信息相關(guān)判別函數(shù)。


式中:phij表示第j條航跡上的第i個屬性信息;phie表示第e條航跡上的第i個屬性信息。式(10)滿足一般相似性測量的性質(zhì),故將其定義為基于兩節(jié)點航跡的屬性相關(guān)判別函數(shù)。
3)綜合相關(guān)判別函數(shù)。
由式(8)~式(10)所得到的表達(dá)式均服從正態(tài)分布且相互獨立,將其綜合可以得到

式(11)服從χ2(n+1)分布,其維數(shù)為俯仰角一維,方位角一維,加上屬性信息多維構(gòu)成。
2.4 兩節(jié)點航跡互關(guān)聯(lián)判決規(guī)則
關(guān)于航跡判決的方法,許多文獻(xiàn)均有相關(guān)介紹。為了避免大的錯誤關(guān)聯(lián)概率,可采用雙門限關(guān)聯(lián)決策規(guī)則[9],即在選擇門限TL的基礎(chǔ)上,再設(shè)一門限TH,滿足TH≥TL,則多節(jié)點航跡關(guān)聯(lián)的雙門限決策規(guī)則為:
1)若Sh≥TH,則判斷輻射源航跡i和輻射源航跡j關(guān)聯(lián);
2)若Sh<TL,則判斷輻射源航跡i和輻射源航跡j有可能關(guān)聯(lián);
3)若TL≤Sh<TH,則不確定,需繼續(xù)進(jìn)行觀測判決。
其中:Sh為根據(jù)綜合判別函數(shù)得出的相似性測度的最大值,即 Sh=max{Shi|i=1,2,…,m};TL為確定的低門限;TH為高門限。TL,TH的確定方法如下:低門限TL確定的原則是使錯誤拒絕多節(jié)點目標(biāo)平臺航跡關(guān)聯(lián)的概率小于預(yù)先給定的漏關(guān)聯(lián)概率β,若選擇TL=β,則可保證漏關(guān)聯(lián)的概率小于β,故選擇低門限TL=β;高門限TH確定的原則是當(dāng)多節(jié)點目標(biāo)平臺航跡is、js本來不關(guān)聯(lián)的情況下,Sh大于TH的概率要小于預(yù)先給定的誤關(guān)聯(lián)概率α。

約束條件為

3 算法流程
本文綜合相關(guān)判別的多無源航跡關(guān)聯(lián)算法步驟如下。
1)設(shè)定節(jié)點n(n=1,2)的航跡編號集合為

2)對節(jié)點n中的每一個節(jié)點內(nèi)部的輻射源航跡進(jìn)行自關(guān)聯(lián):
① 選擇節(jié)點ni,i=1;
② 任取節(jié)點n1中的兩條輻射源航跡i,j(i≠j),將兩航跡的綜合信息代入式(4),求出綜合相關(guān)判別函數(shù)值;
③若遍歷求解完節(jié)點n1中的輻射源航跡對后,則 i=i+1(i≤2),轉(zhuǎn)至②。
3)通過判別規(guī)則,依次對節(jié)點ni中的輻射源航跡對的判別函數(shù)值進(jìn)行判決,若在t時刻判決航跡i與航跡j為關(guān)聯(lián)對,則

否則

4)當(dāng)mij≥6時,航跡i與航跡j為固定關(guān)聯(lián)對,并且在后續(xù)的檢驗中,它們不再接受關(guān)聯(lián)檢驗,直接代入式(7)進(jìn)行航跡合成;否則,不關(guān)聯(lián)。
5)在4)所合成的目標(biāo)平臺航跡的基礎(chǔ)上,對節(jié)點n的目標(biāo)平臺航跡進(jìn)行互關(guān)聯(lián):
①任取節(jié)點n1和n2中各一條目標(biāo)平臺航跡i,j,將兩航跡的綜合信息代入式(11),求出綜合相關(guān)判別函數(shù)值;
②若遍歷求解完兩節(jié)點的目標(biāo)平臺航跡對后,進(jìn)入6);否則轉(zhuǎn)至5)中的①。
6)通過雙門限判決規(guī)則,對5)中所得判別函數(shù)值進(jìn)行判決,最終獲得關(guān)聯(lián)后的航跡。
算法流程如圖2所示。
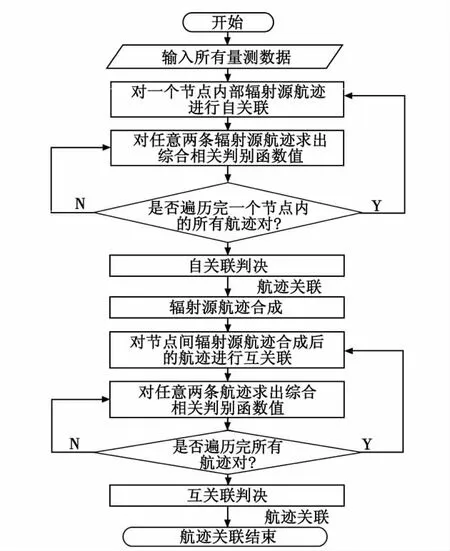
圖2 算法的流程圖Fig.2 Flow chart of the arithmetic
4 算法仿真與性能分析
仿真考慮兩傳感器觀測3個目標(biāo)的情況,并且每個目標(biāo)上面都有兩個輻射源。目標(biāo)1、目標(biāo)2和目標(biāo)3均做勻速直線運(yùn)動,3個目標(biāo)的6個輻射源的飛行軌跡如圖3所示,初始參數(shù)如表1所示。

表1 6輻射源的飛行初始參數(shù)Table 1 Flight initialization parameters of six radiant points
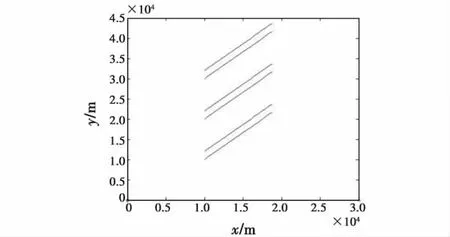
圖3 6個輻射源的飛行軌跡示意圖Fig.3 The flight contrail pictorial view of six radiant points
傳感器1位于(0,0,0,)(單位為 m),傳感器 2位于 (3000,0,0)(單位為m),傳感器1和傳感器2的方位角和俯仰角測角誤差分別為1.8°和1.6°。
為了驗證算法的性能,用蒙特卡羅方法對本文算法進(jìn)行50次仿真,圖4、圖5分別為對節(jié)點1和節(jié)點2探測到的輻射源航跡進(jìn)行節(jié)點內(nèi)部自關(guān)聯(lián)的正確關(guān)聯(lián)率。為了計算簡便,屬性相關(guān)信息取的是對航跡關(guān)聯(lián)影響最大的3個信息,即工作頻率、PRI、脈寬。工作頻率的誤差 σe1為1 ~1.5 MHz,PRI的誤差 σe2為 0.002 ~0.0023 ms,脈寬的誤差 σe3為0.002 ~0.0023 μs[10],在一節(jié)點內(nèi)部航跡自關(guān)聯(lián)判決時,經(jīng)過試驗取閥值參數(shù)ε=0.68。

圖4 節(jié)點1中輻射源航跡正確關(guān)聯(lián)率Fig.4 Correct association rate of radiant point flight path of node 1

圖5 節(jié)點2中輻射源航跡正確關(guān)聯(lián)率Fig.5 Correct association rate of radiant point flight path of node 2
圖6 表示兩節(jié)點進(jìn)行互關(guān)聯(lián)的正確關(guān)聯(lián)率,并和加權(quán)法進(jìn)行比較。

圖6 綜合信息法和加權(quán)法關(guān)聯(lián)正確率Fig.6 The integrated correct association rate
表2表示的是綜合信息法和加權(quán)法正確率的定量比較。
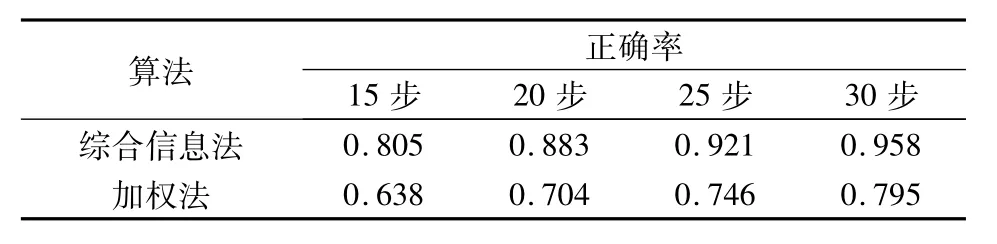
表2 綜合信息法和加權(quán)法正確率的定量比較Table 2 Comparison of correct association rate of different methods
從仿真實驗來看,本文所提的算法能夠較為精確地進(jìn)行多無源傳感器的航跡關(guān)聯(lián),分析圖3~圖6及表2的結(jié)果,可以得到以下結(jié)論。
1)在進(jìn)行各自節(jié)點內(nèi)部自關(guān)聯(lián)時,隨著步長的增加,輻射源航跡正確關(guān)聯(lián)率也逐漸增高;在進(jìn)行兩節(jié)點間的互關(guān)聯(lián)時,關(guān)聯(lián)正確率也是隨著步長的增加而增加,說明此算法能有效進(jìn)行無源傳感器的航跡關(guān)聯(lián),且正確率較高。
2)綜合信息法與加權(quán)法進(jìn)行比較可知,本文所提出的方法,在關(guān)聯(lián)正確率上要遠(yuǎn)遠(yuǎn)高于加權(quán)法的關(guān)聯(lián)正確率。
5 結(jié)束語
針對無源傳感器航跡關(guān)聯(lián)的問題,本文提出了一種基于輻射源航跡自關(guān)聯(lián)和目標(biāo)平臺航跡互關(guān)聯(lián)的綜合相關(guān)判別算法。該算法的特點是,充分考慮到了無源傳感器探測目標(biāo)平臺時得到輻射源航跡這一特點,通過輻射源航跡到目標(biāo)平臺航跡兩步關(guān)聯(lián),實現(xiàn)最終的航跡關(guān)聯(lián),而且該算法充分運(yùn)用了無源傳感器探測得到的角度信息和屬性信息,增強(qiáng)了關(guān)聯(lián)的精確度。通過仿真實驗表明,該算法能夠有效解決多無源傳感器的航跡關(guān)聯(lián)問題,并且有較高的關(guān)聯(lián)正確概率。
[1] 何友,王國宏,彭應(yīng)寧,等.多傳感器信息融合及應(yīng)用[M].北京:電子工業(yè)出版社,2000.
[2] 依曉,關(guān)欣,何友.分布式跟蹤系統(tǒng)的灰色航跡關(guān)聯(lián)模型[J].信號處理,2005,21(6):653-655.
[3] LLINAS J,WALTZ E.Multisensor data fusion[M].Norwood,Massachusetts:Artech House,1990.
[4] 朱必浩,馮新喜,鹿傳國,等.綜合利用各類信息的一類灰色航跡關(guān)聯(lián)算法[J].電光與控制,2011,18(7):22-25.
[5] 李敬輝,涂擁軍,黃高明.艦載被動傳感器數(shù)據(jù)關(guān)聯(lián)算法研究[J].海軍工程大學(xué)學(xué)報,2008,20(1):44-49.
[6] 董紅波,王剛,劉進(jìn)忙,等.機(jī)載雷達(dá)與ESM航跡關(guān)聯(lián)技術(shù)研究[J].傳感器與微系統(tǒng),2010,29(1):12-14.
[7] 趙海英,黃輝.基于正態(tài)分布判別函數(shù)的航跡關(guān)聯(lián)門限算法[J].艦船電子工程,2005,25(6):8-10.
[8] 顏坤玉,王杰貴,白日輝.基于D-S證據(jù)理論的無源航跡關(guān)聯(lián)算法[J].信息與電子工程,2010,8(5):550-504.
[9] 楊萬海.多傳感器數(shù)據(jù)融合及其應(yīng)用[M].西安:西安電子科技大學(xué)出版社,2004.
[10] 王杰貴,羅景青,革學(xué)明.無源跟蹤中基于灰關(guān)聯(lián)信息融合的概率數(shù)據(jù)關(guān)聯(lián)算法[J].電子學(xué)報,2006,3(3):391-395.
猜你喜歡
新世紀(jì)智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:30
當(dāng)代陜西(2021年17期)2021-11-06 03:21:36
原道(2020年2期)2020-12-21 05:47:06
當(dāng)代陜西(2019年15期)2019-09-02 01:52:00
中國非營利評論(2018年2期)2018-06-18 10:48:50
學(xué)苑創(chuàng)造·A版(2018年11期)2018-02-01 06:29:20
自動化學(xué)報(2017年1期)2017-03-11 17:31:17
讀者(2017年5期)2017-02-15 18:04:18
西藏科技(2016年5期)2016-09-26 12:16:39
振動工程學(xué)報(2015年1期)2015-03-01 01:15:42
