海量目標量測數據下的目標跟蹤
2012-08-27 13:13:50阮鋮巍徐保偉寇英信李戰武谷長春
電光與控制 2012年10期
關鍵詞:模型
阮鋮巍, 徐保偉, 寇英信, 李戰武, 谷長春
(1.空軍工程大學航空航天工程學院,西安 710038; 2.中國人民解放軍95247部隊,廣東 惠州 516259)
0 引言
隨著網絡中心戰的逐步實現,各種各樣的傳感器已經遍布陸、海、空、天等物理空間,以及電、磁等虛擬空間。例如,天基傳感器依靠成像偵察衛星、電子偵察衛星、導彈預警偵察衛星、海洋偵察衛星等偵察衛星從太空軌道上對空中目標實施偵察、監視和跟蹤;空基傳感器系統依靠裝載在輕型固定翼飛機、直升機、無人機以及高空系留氣球上的雷達、光電設備、照相設備等對目標進行跟蹤[1];陸基傳感器系統包括分布在陸地上的各種偵察設備,如雷達設備、電子偵聽設備、激光、紅外探測設備等[1];海基傳感器系統主要有水面艦艇和潛艇等平臺攜帶的雷達、聲納、電子支援設備和光電設備等[2]。
由于現代戰場中,各種各樣的傳感器廣泛分布,對同一目標進行跟蹤的傳感器很多,會產生大量關于目標運動的數據。目前的跟蹤算法對于這種大數據量的處理主要存在以下問題:1)當需要融合的數據量比較大時,各種濾波融合算法計算量較大,計算的實時性較差[3-4];2)多傳感器所獲取的大量數據的管理比較復雜[5];3)對于一般融合跟蹤算法,都需要確切知道系統模型和量測模型[6-7];4)在完成整個目標跟蹤的任務中,可能會有部分傳感器退出跟蹤任務,而另一部分傳感器加入跟蹤任務。傳感器的退出、加入更是增加了一般多傳感器融合跟蹤算法的實現難度。
如何從大量傳感器對同一個目標進行跟蹤時產生的海量目標量測數據中提取可用信息,同時避免不必要或者不可靠信息,最終估計出目標的運動狀態,對于網絡中心實現目標的跟蹤來說是迫切需要解決的問題。
1 傳感器模型
傳感器對目標運動參數的測量一般是通過對目標定位的方式進行的,因此一般傳感器的量測為目標當前時刻的位置。本文所研究的傳感器為該類傳感器。
對于傳感器,除了關注所測量的量以外,一般還關注數據更新周期、量測數據的分布等信息。但是,對于大多數傳感器,更新的周期并不固定,而且量測的誤差大小也會變化。更新周期的變化意味著某一個傳感器在有了一次量測之后,下一次量測的更新時刻就未知,量測誤差也會隨時間改變,即對于同一個傳感器前后兩次量測相互獨立,沒有相關性。為了避免這種情況影響濾波精度,同時也為了簡化統計計算量,本文沒有利用這些未定信息,只是利用了傳感器的量測值,這意味著本文方法的普遍適用性。
傳感器有兩種最優工作狀態:1)概率最優;2)期望最優。概率最優是指在量測過程中,量測值為真實值的概率最大,對于噪聲也就是說,噪聲為零的概率最大。期望最優是指在量測過程中,量測值的期望值為目標真實值,即噪聲的期望值為零,即零均值噪聲。本文假設傳感器正常工作狀態為期望最優,即量測噪聲為零均值噪聲。
基于以上分析,本文建立傳感器模型。
1)周期服從一個有界均勻分布,即周期

這樣可以保證傳感器的周期是隨機的。
2)實際量測中,傳感器的周期是會變化的,因此傳感器實際更新周期為由式(1)得出的周期加上一個隨機誤差

3)傳感器噪聲為零均值正態噪聲分布,方差服從0~1000的均勻分布。
2 統計量測基礎
2.1 相關定義及說明
定義1統計量測點。對于傳感器海量的量測數據,通過統計計算出某時刻的目標位置點,該時刻稱為統計時刻,該點稱為統計量測點,如圖1所示。
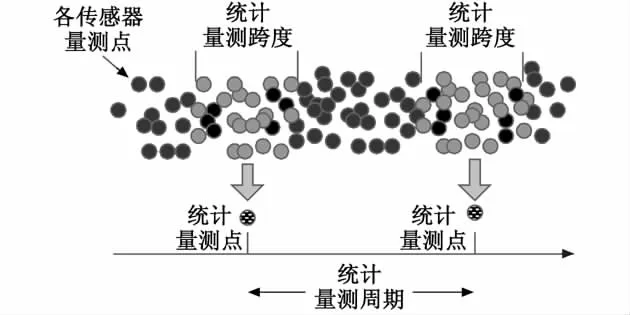
圖1 統計量測點Fig.1 Statistical measuring points
定義2統計量測周期。統計量測點的更新周期。
定義3統計量測跨度。以統計時刻為結束時刻的一個時間段,統計量測點是通過在該時間段的實際傳感器量測數據統計計算出來的。
顯然,統計量測點并不是某一傳感器實際量測值,而是眾多傳感器在統計時刻前一段時間(統計量測跨度)內的實際量測數據通過統計計算出來的“統計點”。
2.2 統計量測定理及證明
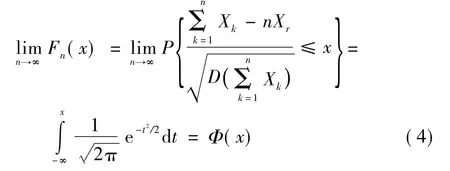
定理1設n個傳感器同一時刻對同一目標的量測為X1,X2,…,Xn,量測之間相互獨立,每一個傳感器的噪聲都為零均值噪聲,即滿足

式中,Xr為目標真實量測,即其期望都為真實目標位置值。那么,當測量數據n足夠大時,可用n個數的平均值來近似估計實際目標位置,并且統計量測點估計方差也可得出。
1)統計量測目標估計位置為
2)統計量測點估計方差為

3 海量量測數據下的目標融合跟蹤算法
3.1 統計量測跨度中的實際量測點外推
由于統計時刻是在統計量測跨度時間段的結束點,而實際量測數據的時刻不一定是該時刻,所以,計算統計量測點前應該將統計量測跨度中的實際量測點外推至統計時刻。
為了減少濾波外推對于大機動目標運動預測的誤差,選用一個比較好的模型算法非常重要。本文選擇文獻[10]中改進的交互式當前統計模型算法進行濾波。
設系統狀態向量為

系統的狀態方程為

式中:FCSM(k)為目標狀態轉移矩陣;G(k)為輸入控制矩陣;為機動加速度的均值。具體矩陣形式參見文獻[10]。過程噪聲ω(k)的協方差

式中:axmax和a-xmax分別為x方向上的最大正、負加速度;Q的取值參見文獻[11]。同樣,Qy也可用此方法求出。
3.2 統計量測IMM濾波
1)初始化。
設有N個模型,每個模型給定一個典型機動頻率和最大正負加速度以及模型間的轉移概率ΠN×N,并設第k+1個統計量測跨度時間段內有n個實際測量數據。
2)模型輸入交互。
交互模型i的狀態估計和狀態協方差陣


3)實際量測點外推。
外推時間大小為量測數據更新時刻到統計時刻的時間段長度。為了簡化計算,提高計算速率,外推時的狀態直接近似為前一統計量測點的濾波狀態。
設第k+1個統計量測跨度時間段內第p個實際測量數據更新時刻為Tk+1,p,并設統計量測周期為Tr,則該實際量測點的外推時間 ΔTk+1,p=p·Tr- Tk+1,p。
然后,通過預測方程

即可進行由實際量測數據更新時刻到統計時刻的外推。
有了第i個模型的外推預測狀態,通過輸出交互即可得到第k+1個統計量測跨度內的第p個實際量測的外推狀態

4)統計量測計算。
根據統計量測定理,統計量測點數據計算如下
5)濾波。
一步預測得
濾波增益
狀態估計

協方差估計
6)模型i概率更新。
其中
式中:vi(k+1)為新時刻新息;Si(k+1)為新息協方差。
7)輸出交互。
4 仿真結果與分析
假設目標起始位置為(0 m,1000 m),目標速度為300 m/s,水平指向x軸方向,目標運動規律如表1所示,運動軌跡如圖2所示。圖2中小圓為目標起始位置,小三角為目標運動終止位置。
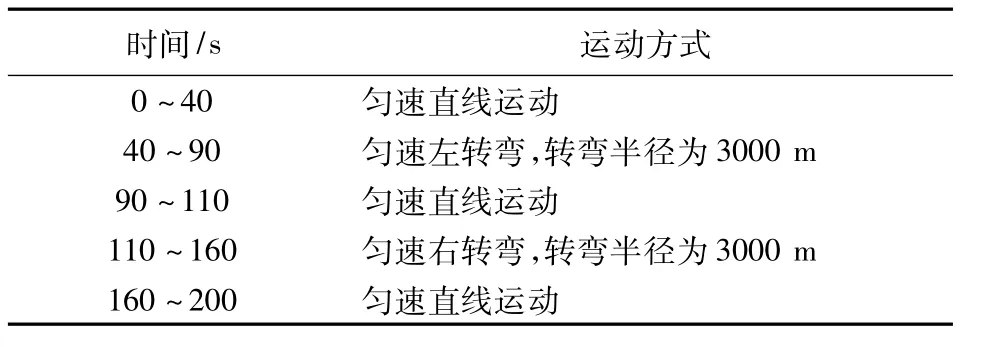
表1 目標真實運動方式Table 1 The target's real movement mode
本文假設量測傳感器數目為40個,每個傳感器更新周期在0.01~2 s內均勻分布,即更新周期

根據以上假設,并根據傳感器模型最終得到實際量測點如圖3所示。
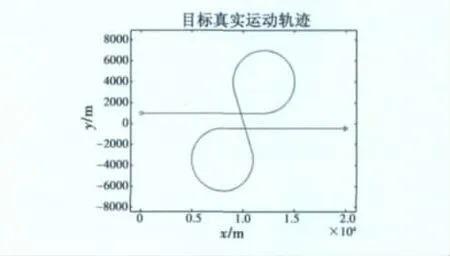
圖2 目標運動軌跡Fig.2 The target’s track
仿真中,取統計量測周期為1 s,統計量測跨度也為1 s。基于以上假設,在選擇合理濾波參數的情況下,應用本文提出的統計濾波方法,得出各統計量測點及最終濾波結果如圖4~圖6所示。
從圖4和圖5可以看出,海量的量測數據經過本文統計方法進行估計預測后,在大大減少數據處理難度的基礎上,也能夠達到令人滿意的跟蹤效果。特別是在目標沒有做機動運動的情況下(90~110 s和160~200 s),跟蹤誤差幾乎為零。在目標做大機動時,跟蹤位置誤差也在200 m范圍內。
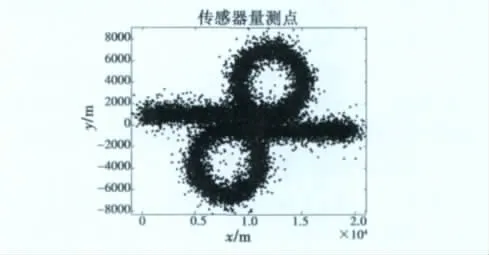
圖3 實際量測點Fig.3 The actual measuring points
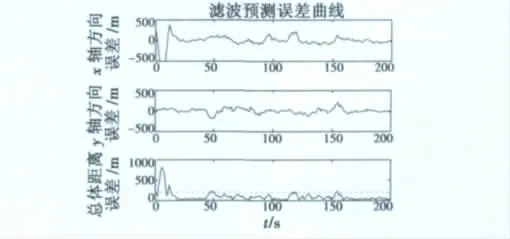
圖4 目標位置誤差Fig.4 The error of target position
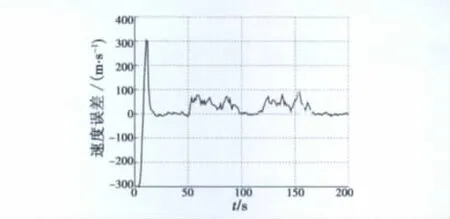
圖5 目標速度誤差Fig.5 The error of target velocity
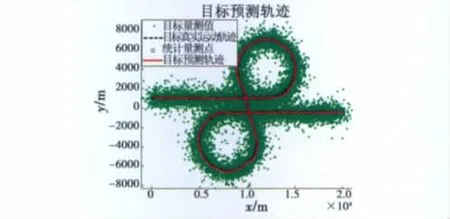
圖6 目標預測軌跡Fig.6 Computed track of the target
5 小結
針對現有跟蹤算法對于海量量測數據處理的困難,提出了本文統計量測的方法。仿真驗證了該方法的有效性。但是,值得注意的是關于統計方法中統計量測間隔和統計量測周期的選取問題。統計量測間隔短,統計的量測數據量就小,可能就會超出中心極限定理的適用范圍;統計量測周期取太小,則會出現部分量測數據重復利用,增加計算量;統計量測間隔太長或者統計量測周期取太大的話,當目標做大機動時就會出現“跟不上”的情況。
[1] 張冬辰,周吉,吳巍,等.軍事通信:信息化戰爭的神經系統[M].北京:國防工業出版社,2008.
[2] 陳克偉,趙濱江.論網絡中心戰[M].北京:解放軍出版社,2004.
[3] DOGANCAY K,TANRIKULU O.Adaptive filtering algorithms with selective partial updates[J].Analog and Digital signal processing,IEEE Transactions on,2001,48(8):726-729.
[4] KARLSSON R,SCHO¨N T,GUSTAFSSON F.Complexity analysis of the marginalized particle filter[J].Signal Processing,IEEE Transaction on,2005,53(11):4408-4411.
[5] 周傲英,金澈清,王國仁,等.不確定性數據管理技術研究綜述[J].計算機學報,2009,32(1):1-16.
[6] 何友,王國宏,關欣,等.信息融合理論及應用[M].北京:電子工業出版社,2010.
[7] 何友,修建娟,張晶煒,等.雷達數據處理及應用[M].2版.北京:電子工業出版社,2009.
[8] GILLISPIE C C.Dictionary of scientific biography[M].New York:Charles Scribners Sons,1971.
[9] 董晴.獨立隨機變量的中心極限定理[J].重慶工學院學報:自然科學版,2007,21(7):85-88.
[10] 譚順成,王國宏,王娜,等.改進的交互式當前統計模型算法[J].電光與控制,2011,18(4):21-25.
[11] 周宏仁,敬忠良,王培德,等.機動目標跟蹤[M].北京:國防工業出版社,1991.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
