一種改進(jìn)型超前角弱磁控制算法
2012-07-04 03:21:58于家斌秦曉飛鄭軍王云寬
電機(jī)與控制學(xué)報(bào) 2012年3期
于家斌, 秦曉飛, 鄭軍, 王云寬
(中國(guó)科學(xué)院自動(dòng)化研究所,北京100190)
0 引言
永磁同步電機(jī)是數(shù)控機(jī)床的核心部件,其高速化是數(shù)控系統(tǒng)發(fā)展的主要趨勢(shì)之一[1]。為了滿足對(duì)各種工件的加工要求,在逆變器容量一定的情況下永磁同步電機(jī)不但應(yīng)有較寬的調(diào)速范圍,而且應(yīng)在高速時(shí)具有較強(qiáng)的帶載能力。因而,其弱磁控制策略成為目前研究的熱點(diǎn)之一。
針對(duì)永磁同步電機(jī)的弱磁控制,國(guó)內(nèi)外一些學(xué)者分別提出了六步電壓法,電流調(diào)節(jié)器法,自適應(yīng)弱磁控制法,非線性降維觀測(cè)器法等弱磁控制策略[2-5]。但是這些方法都較為復(fù)雜,實(shí)現(xiàn)困難。在此基礎(chǔ)上,一些學(xué)者提出了便于實(shí)現(xiàn)的改進(jìn)型方法,例如利用d,q軸電流和電壓外環(huán)輸出的電壓差修正電流設(shè)定值的方法,簡(jiǎn)化的電壓控制算法,基于氣隙磁場(chǎng)定向的弱磁控制算法,超前角弱磁控制算法等[6-9]。然而針對(duì)提高弱磁階段電機(jī)帶載能力研究的相關(guān)文獻(xiàn)卻比較少。
超前角弱磁控制算法是目前較為常用的弱磁控制方法[9]。運(yùn)用該算法控制表貼式永磁同步電機(jī)運(yùn)行于弱磁區(qū)時(shí),隨著負(fù)載的增加,通常會(huì)出現(xiàn)如下問(wèn)題:從恒轉(zhuǎn)矩區(qū)到恒功率區(qū)的過(guò)渡過(guò)程中,出現(xiàn)較大的電流震蕩,從而引起速度波動(dòng),系統(tǒng)的動(dòng)態(tài)性能變差。而在恒功率區(qū),會(huì)出現(xiàn)穩(wěn)態(tài)速度下降的現(xiàn)象,穩(wěn)態(tài)時(shí)的速度和電流波動(dòng)也會(huì)變大,系統(tǒng)的穩(wěn)態(tài)性能不佳。
為此,本文在分析傳統(tǒng)超前角弱磁控制算法原理的基礎(chǔ)上,提出了一種改進(jìn)型超前角弱磁控制算法,并通過(guò)實(shí)驗(yàn)結(jié)果驗(yàn)證了算法的正確性和有效性。
1 表貼式永磁同步電機(jī)數(shù)學(xué)模型及傳統(tǒng)超前角弱磁控制算法
d-q軸系下表貼式永磁同步電機(jī)定子電壓方程[10]為
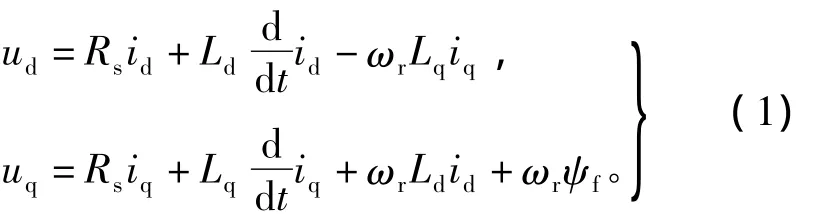
式中:Ld和Lq分別為直軸和交軸同步電感,且Ld=Lq,Rs為定子相電阻,ωr為轉(zhuǎn)子的電角速度,ψf為轉(zhuǎn)子永磁體產(chǎn)生的勵(lì)磁磁場(chǎng)的基波磁鏈。
電機(jī)高速穩(wěn)定運(yùn)行時(shí),忽略定子壓降,電壓方程可以改寫為


由式(3)可以看出,當(dāng)電機(jī)定子電壓達(dá)到逆變器的輸出極限時(shí),為了使轉(zhuǎn)速ωr升高,只能通過(guò)增加直軸去磁電流分量id和減小交軸電流分量iq,以維持電壓平衡,達(dá)到弱磁調(diào)速的目的。
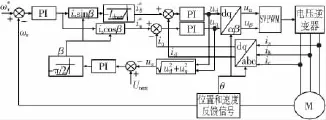
圖1 傳統(tǒng)超前角弱磁算法框圖Fig.1 Block diagram of traditional leading angle flux weakening control algorithm
2 改進(jìn)的SVPWM過(guò)調(diào)制算法
表貼式永磁同步電機(jī)采用傳統(tǒng)超前角弱磁控制算法加載運(yùn)行時(shí),當(dāng)給定電機(jī)轉(zhuǎn)速超過(guò)其轉(zhuǎn)折速度,在其升速階段,會(huì)出現(xiàn)d,q軸電流的劇烈震蕩,如圖2所示,進(jìn)而導(dǎo)致速度的波動(dòng),電機(jī)沒有實(shí)現(xiàn)從恒轉(zhuǎn)矩區(qū)到恒功率區(qū)的平滑過(guò)渡。電流的劇烈震蕩通常會(huì)引起驅(qū)動(dòng)器的過(guò)流保護(hù),同時(shí)引發(fā)逆變電路較大的di/dt和dv/dt,增大電機(jī)運(yùn)行時(shí)的電磁干擾,降低功率器件的使用壽命。通過(guò)分析得出在弱磁調(diào)速的升速階段,電流環(huán)的輸出即電壓指令值在某些瞬間會(huì)超過(guò)SVPWM算法的輸出范圍,由于PI調(diào)節(jié)器固有的延遲性,依靠弱磁控制的電壓閉環(huán)并不能快速地將電壓調(diào)整過(guò)來(lái),從而造成了輸出電壓在某些瞬間不可控,引起了電流的震蕩。為此,本文嘗試采用一種改進(jìn)的SVPWM過(guò)調(diào)制算法,在逆變器直流側(cè)電壓不變的情況下增大其交流電壓輸出,提高電壓輸出能力[11],改善弱磁調(diào)速時(shí)的動(dòng)態(tài)性能。
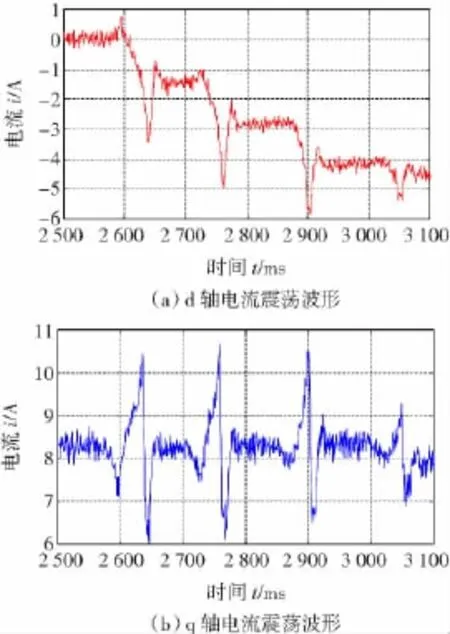
圖2 d,q軸電流震蕩波形圖Fig.2 The vibration waveforms of d,q currents
SVPWM的基本原理為在PWM載波周期Tpwm內(nèi),利用相鄰的兩個(gè)基本電壓矢量的時(shí)間線性組合來(lái)模擬參考電壓矢量。以第0扇區(qū)為例,給定矢量Ur=T1U(100)+T2U(110),其中 T1,T2分別是U1(100)和U2(110)矢量的作用時(shí)間,如圖3所示。一般情況下要將參考電壓矢量圓整到正六邊形內(nèi)切圓的范圍內(nèi),以保證輸出不超出正六邊形的范圍。
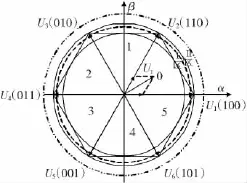
圖3 SVPWM空間電壓矢量圖Fig.3 Diagram of SVPWM voltage space vector
當(dāng)參考電壓矢量的幅值超出正六邊形范圍時(shí),必須對(duì)其進(jìn)行調(diào)整,使其限制到正六邊形范圍內(nèi)。文獻(xiàn)[12]和[13]提出的過(guò)調(diào)制算法首先根據(jù)參考電壓的大小判斷所在的過(guò)調(diào)制區(qū)域,然后根據(jù)區(qū)域不同對(duì)其進(jìn)行調(diào)整,根據(jù)調(diào)整后的電壓采取不同的控制策略計(jì)算各個(gè)基本電壓矢量的作用時(shí)間。由于上述算法主要是針對(duì)開環(huán)系統(tǒng)的,必須保持輸出電壓基波與參考電壓相符。對(duì)參考電壓的調(diào)整主要采用查表計(jì)算,這種方法需要預(yù)先在控制器中存儲(chǔ)大量的數(shù)據(jù),不利于工程實(shí)現(xiàn)。對(duì)于閉環(huán)矢量控制系統(tǒng),可以依靠電流調(diào)節(jié)器的作用自動(dòng)對(duì)參考電壓進(jìn)行調(diào)整,使輸出電壓基波滿足要求。因此可以在不要求輸出電壓基波和參考電壓相一致的前提下對(duì)上述SVPWM過(guò)調(diào)制方法進(jìn)行改進(jìn),圖4為改進(jìn)的過(guò)調(diào)整算法流程圖。
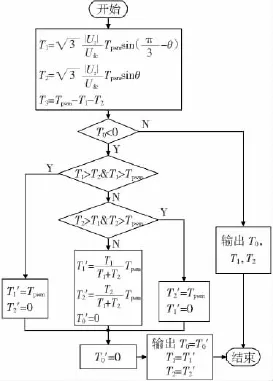
圖4 改進(jìn)的過(guò)調(diào)制算法流程圖Fig.4 Flow chart of improved over modulation algorithm
在過(guò)調(diào)制區(qū)I,以電壓零矢量作用時(shí)間T0是否小于零作為過(guò)調(diào)制起始點(diǎn)的判斷依據(jù),當(dāng)指令電壓矢量的軌跡位于正六邊形外接圓和正六邊形之間時(shí),將原指令電壓軌跡超出正六邊形的部分校正到正六邊形的邊上,不改變給定電壓矢量的相位而直接將矢量幅值截短來(lái)實(shí)現(xiàn)過(guò)調(diào)控制。在過(guò)調(diào)制區(qū)II,零矢量作用時(shí)間T0始終為負(fù)值,首先設(shè)定T0為0,利用6個(gè)基本矢量和正六邊形的邊進(jìn)一步增大輸出基波的幅值。在基本矢量上停留的時(shí)間越長(zhǎng),輸出的電壓基波幅值越大。當(dāng)每個(gè)基本矢量上停留的時(shí)間達(dá)到六分之一周期時(shí),輸出電壓為6拍階梯波。
3 基于q軸電流誤差的超前角弱磁控
通過(guò)對(duì)傳統(tǒng)超前角弱磁控制算法的原理分析可以得出,雖然增加Umax的取值可以使弱磁時(shí)輸出的電壓指令值變大,但是此時(shí)指令電壓已經(jīng)接近甚至超出逆變器的輸出范圍,會(huì)導(dǎo)致輸出電壓的不可控狀態(tài),從而引起速度和電流的震蕩,造成系統(tǒng)的不穩(wěn)定。
由于弱磁時(shí)的電壓閉環(huán)限制了電機(jī)定子的輸入電壓,從而導(dǎo)致恒功率階段穩(wěn)態(tài)速度的下降,因此,本文提出使用q軸電流誤差閉環(huán)代替電壓閉環(huán)的超前角弱磁控制算法,來(lái)提高弱磁控制時(shí)的穩(wěn)態(tài)性能。
電機(jī)在轉(zhuǎn)折速度以下時(shí),由于電流環(huán)PI調(diào)節(jié)器的作用,iq與其指令值iq*的偏差iqerr幾乎等于零。但是隨著速度的升高,當(dāng)電機(jī)端電壓達(dá)到逆變器所能提供的最高電壓時(shí),PI調(diào)節(jié)器進(jìn)入飽和狀態(tài),失去調(diào)節(jié)電流的能力,使電流環(huán)失去控制,iqerr明顯增大。因此可以將偏差iqerr作為開啟弱磁控制的條件。圖5為基于q軸電流誤差的超前角弱磁控制框圖。

圖5 基于q軸電流誤差的超前角弱磁控制框圖Fig.5 Block diagram of leading angle flux weakening control based on q axis current error
在圖5所示的弱磁控制系統(tǒng)中,設(shè)置了一個(gè)基于q軸電流誤差的反饋環(huán)節(jié)來(lái)進(jìn)行弱磁控制。首先用局部平均窗口對(duì) iqerr進(jìn)行數(shù)字濾波,消除由于PWM斬波引起的高頻噪聲干擾。將濾波后的iqerr輸入PI調(diào)節(jié)器產(chǎn)生超前角β,來(lái)計(jì)算產(chǎn)生新的id和iq。理論上,在轉(zhuǎn)折速度以下,iqerr=0,但是在實(shí)際系統(tǒng)中,即使經(jīng)過(guò)了數(shù)字濾波,可能iqerr≠0。經(jīng)過(guò)PI調(diào)節(jié)器之后,其輸出的id≠0,并沒有實(shí)現(xiàn)在恒轉(zhuǎn)矩區(qū)對(duì)電機(jī)的最大轉(zhuǎn)矩/電流控制。為避免上述問(wèn)題,實(shí)現(xiàn)在轉(zhuǎn)折速度以下β=0,不開啟弱磁控制,在轉(zhuǎn)折速度以上,β由PI調(diào)節(jié)器輸出產(chǎn)生,本算法將+與開啟弱磁的上限值Utop和下限值Ubtm進(jìn)行比較,當(dāng)其大于Utop時(shí),超前角β采用PI調(diào)節(jié)器的輸出值,當(dāng)其小于Ubtm時(shí),令超前角β=0。Utop和Ubtm的取值根據(jù)實(shí)際經(jīng)驗(yàn)進(jìn)行選擇。同樣在弱磁調(diào)速時(shí),仍要限制id使其小于電機(jī)的最大去磁電流。
4 實(shí)驗(yàn)結(jié)果
為了驗(yàn)證本文提出的算法的有效性,本文設(shè)計(jì)了基于數(shù)字信號(hào)處理器(digital signal processor,DSP)的全數(shù)字永磁同步交流伺服實(shí)驗(yàn)平臺(tái)。DSP選用TI公司的 TMS320LF2812,逆變器采用 MITSUBISHI公司的PM75RSA120,PMSM的主要參數(shù):額定功率3.2 kW,額定電壓300V,額定電流6.8 A,額定轉(zhuǎn)速2 000 r/min,靜力矩16 N·m,電壓常數(shù)144 V/1000 r·min-1,電機(jī)極對(duì)數(shù)3,轉(zhuǎn)子慣量26.7 ×10-4kg·m2。
圖6 TL=9 N·m時(shí)傳統(tǒng)超前角弱磁控制算法轉(zhuǎn)速和d,q軸電流波形Fig.6 The waveforms of speed and d,q currents with traditional leading angle flux weakening control algorithm when TL=9 N·m
負(fù)載轉(zhuǎn)矩TL=9 N·m,給定轉(zhuǎn)速3 000 r/min,加速時(shí)間2 s時(shí),圖6和圖7分別給出了采用傳統(tǒng)超前角弱磁控制算法和本文提出的改進(jìn)型超前角弱磁控制算法的實(shí)驗(yàn)結(jié)果。由兩圖對(duì)比可以看出,采用傳統(tǒng)超前角弱磁控制算法在弱磁升速階段,會(huì)出現(xiàn)d,q軸電流和速度的劇烈震蕩(如圖6中的虛線框所示)。采用改進(jìn)型超前角弱磁控制算法之后,由于使用了SVPWM過(guò)調(diào)制控制策略,增強(qiáng)了逆變器的電壓輸出能力,弱磁升速階段的電流和速度震蕩明顯減小,改善了系統(tǒng)的動(dòng)態(tài)性能。
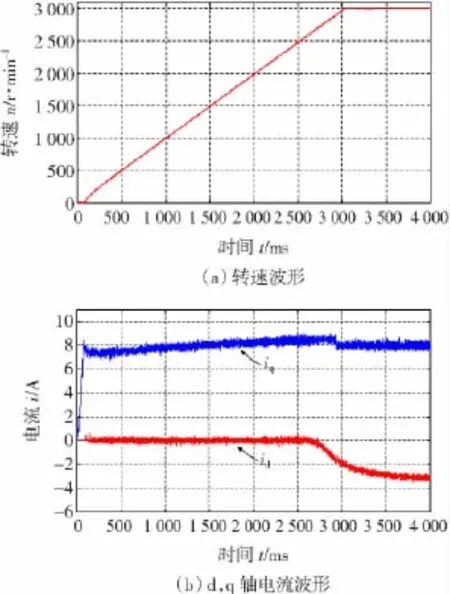
圖7 TL=9 N·m時(shí)改進(jìn)型的超前角弱磁控制算法轉(zhuǎn)速和d,q軸電流波形Fig.7 The waveforms of speed and d,q currents with improved leading angle flux weakening control algorithm when TL=9 N·m
負(fù)載轉(zhuǎn)矩TL=12 N·m,給定轉(zhuǎn)速3 000 r/min,加速時(shí)間2 s時(shí),圖8給出了采用傳統(tǒng)超前角弱磁控制算法的轉(zhuǎn)速波形,可以看出隨著負(fù)載的增大,弱磁階段的穩(wěn)態(tài)速度無(wú)法達(dá)到3 000 r/min,并且速度有震蕩。圖9給出了傳統(tǒng)超前角弱磁控制算法在過(guò)調(diào)制基礎(chǔ)上增大Umax后轉(zhuǎn)速和d,q軸電流的波形,雖然穩(wěn)態(tài)速度能夠到達(dá)3 000 r/min,但是穩(wěn)態(tài)階段速度和d,q軸電流都有較大的震蕩,穩(wěn)態(tài)性能較差。采用本文提出的改進(jìn)型超前角弱磁控制算法后轉(zhuǎn)速和d,q軸電流的波形如圖10所示,可以看出通過(guò)改進(jìn)型超前角弱磁控制算法中的q軸電流誤差閉環(huán)最終將弱磁階段的電壓調(diào)整到輸出范圍內(nèi),基本消除了速度穩(wěn)態(tài)誤差。與圖9的對(duì)比可以看出,穩(wěn)態(tài)階段速度和d,q軸電流的波動(dòng)很小,穩(wěn)態(tài)性能得到了明顯改善。
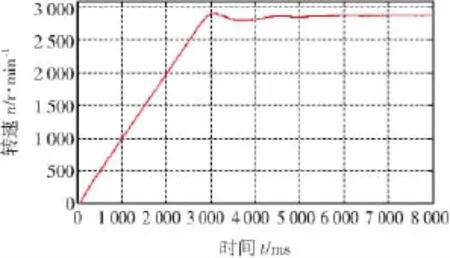
圖8 TL=12 N·m時(shí)傳統(tǒng)超前角弱磁控制算法轉(zhuǎn)速波形Fig.8 The waveform of speed with traditional leading angle flux weakening control algorithm when TL=12 N·m
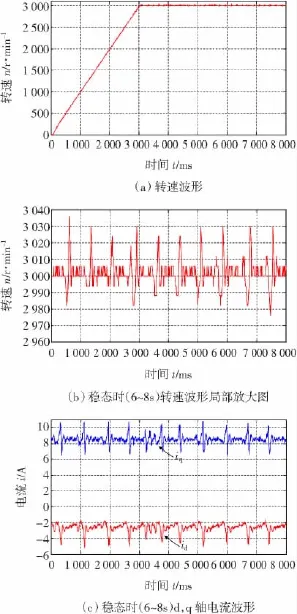
圖9 TL=12 N·m時(shí)增大Umax后轉(zhuǎn)速和d,q軸電流波形Fig.9 The waveforms of speed and d,q currents after increasing Umaxwhen TL=12 N·m
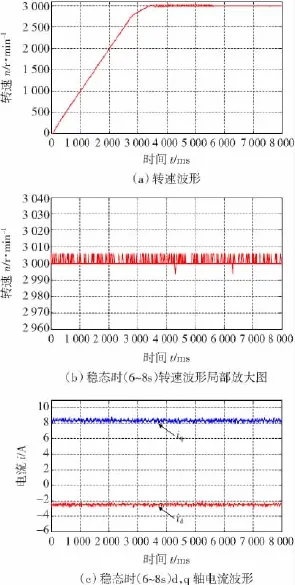
圖10 TL=12 N·m時(shí)改進(jìn)型超前角弱磁控制算法速度和d,q軸電流波形Fig.10 The waveforms of speed and d,q currents with improved leading angle flux weakening control algorithm when TL=12 N·m
5 結(jié)語(yǔ)
本文以表貼式永磁同步電機(jī)為研究對(duì)象,在傳統(tǒng)超前角弱磁控制算法的基礎(chǔ)上,針對(duì)電機(jī)在弱磁調(diào)速時(shí),隨著負(fù)載增加而出現(xiàn)的動(dòng)態(tài)過(guò)程電流震蕩變大,穩(wěn)態(tài)時(shí)速度波動(dòng)以及穩(wěn)態(tài)誤差變大的現(xiàn)象,分析其主要原因?yàn)槟孀兤鞯碾妷狠敵瞿芰Σ蛔愫腿醮耪{(diào)速時(shí)采用的電壓閉環(huán)控制。為此,本文提出一種改進(jìn)型超前角弱磁控制算法,具有如下特點(diǎn):
1)采用了一種計(jì)算量小,便于實(shí)現(xiàn)的SVPWM過(guò)調(diào)制算法,提高了逆變器直流母線電壓利用率,增強(qiáng)了電壓輸出能力,減小了速度響應(yīng)動(dòng)態(tài)過(guò)程的電流震蕩,改善了弱磁調(diào)速的動(dòng)態(tài)性能;
2)采用q軸電流誤差閉環(huán)代替電壓閉環(huán)進(jìn)行弱磁控制,有效地減小了穩(wěn)態(tài)階段的速度波動(dòng),避免了穩(wěn)態(tài)速度的下降,提高了系統(tǒng)的穩(wěn)態(tài)性能和弱磁控制的魯棒性。
[1] CHEN G H,TSENG K J.Design of a permanent magnet directdriven wheel motor drive for electric vehicle[C]//1996 IEEE Conference of Power Electronics Specialists,June 23 -27,1996,Baveno,Italy.1996:1933 -1939.
[2] BOSE B K.A high-performance inverter-fed drive system of an interior permanent magnet synchronous machine[J].IEEE Transactions on Industry Applications,1988,24(6):987 -997.
[3] MORIMOTO S,SANADA M,TAKEDA Y,et al.Wide-speed operation of interior permanent magnet synchronous motors with highperformance current regulator[J].IEEE Transactions on Industry Applications,1994,30(4):920 -926.
[4] SOZER Y,TORREY D A.Adaptive flux weakening control of permanent magnet synchronous motors[C]//The 1998 IEEE Industry Applications Conference,October 12 - 15,1998,St.Louis,USA.1998:475 -482.
[5] CHEN Jiunnjiang,CHIN Kanping.Automatic flux-weakening control of permanent magnet synchronous motors using a reduced-order controller[J].IEEE Transactions on Power Electronics,2000,15(5):881-890.
[6] 唐朝暉,丁強(qiáng),喻壽益,等.內(nèi)埋式永磁同步電機(jī)的弱磁控制策略[J].電機(jī)與控制學(xué)報(bào),2010,14(5):68 -72.
TANG Zhaohui,DING Qiang,YU Shouyi,et al.Research of flux weakening strategy of interior permanent magnet synchronous motor[J].Electric Machines and Control,2010,14(5):68 - 72.
[7] 劉海燕,王毅,劉杰,等.電動(dòng)車用感應(yīng)電機(jī)弱磁控制研究[J].電機(jī)與控制學(xué)報(bào),2005,9(5):452-455.
LIU Haiyan,WANG Yi,LIU Jie,et al.Field-weakening control of induction motor for electric vehicles[J].Electric Machines and Control,2005,9(5):452 -455.
[8] BONHO B,PATEL N,SCHULZ S,et al.New field weakening technique for high saliency interior permanent magnet motor[C]//The 2003 IEEE Industry Applications Conference,October 12 -16,2003,Salt Lake City,USA.2003:898-905.
[9] ZORDAN M,VAS P,RASHED M,et al.Field-weakening in vector controlled and DTC PMSM drive,a comparative analysis[C]//2000 8th International Conference on Power Electronics and Variable Speed Drives,September 18 - 19,2000,London,UK.2000:493-499.
[10] 秦曉飛.永磁同步交流伺服驅(qū)動(dòng)關(guān)鍵技術(shù)研究[D].北京:中國(guó)科學(xué)院自動(dòng)化研究所,2010.
[11] 王旭東,張思艷,余騰偉.SVPWM過(guò)調(diào)制中控制角算法的分析與應(yīng)用[J].電機(jī)與控制學(xué)報(bào),2010,14(12):63 -67.
WANG Xudong,ZHANG Siyan,YU Tengwei.Control angle algorithm of SVPWM over modulation analysis and application[J].Electric Machines and Control,2010,14(12):63 -67.
[12] HOLTZ J.Pulsewidth modulation a survey[J].IEEE Transaction Industry Electron,1992,39(6):410 -420.
[13] HOLTZ J.On continuous control of PWM inverters in the over modulation range including the six-step mode[J].IEEE Transactions on Power Electronics,1993,8(4):546 -552.
