基于動態PCA 的核動力裝置傳感器故障檢測
2012-06-19 05:14:56宋梅村
武漢理工大學學報(交通科學與工程版) 2012年6期
宋梅村 蔡 琦
(海軍工程大學船舶與動力學院 武漢 430033)
為了核動力裝置安全可靠運行,由現場傳感器獲取的數據必須是準確、合理的,為此,需要對來自現場傳感器的數據進行驗證.其中傳感器的故障檢測是整個驗證工作的基礎.傳感器通常有如下幾種故障形式,即卡死、恒增益故障、恒偏差故障以及漂移故障等.目前廣泛使用的傳感器故障方法僅僅通過判斷傳感器數據是否越限來進行故障檢測,這種方法的優點是簡單,但缺點也是過于簡單,經常引起傳感器故障的誤判和漏判.
核動力裝置是一個大型的熱工水力系統,一回路冷卻劑將反應堆堆芯發出的熱量帶出,通過蒸汽發生器傳遞給二回路水,產生蒸汽推動汽輪機做功.熱力系統傳感器具有很強的相關性,體現了設備本身的運行規律.該規律不僅與質量守恒和能量守恒等物理定律有關,也與運行規程或運行人員的操作習慣有關[1],主元分析(principle component analysis,PCA)是一種對大量數據進行統計分析的方法,其用于傳感器故障檢測的基本思想是利用過程變量間的相關關系,建立正常工況下的主元模型,通過檢驗新的數據樣本相對于主元模型的背離程度,從而發現傳感器故障.它可以將一個多指標的問題轉化為較少的綜合指標.這些較少的綜合指標之間互不相關并能提供原有指標的絕大部分信息.另外,PCA 障檢測方法不依賴于過程的數學模型,因此非常適合在難以建立精確數學模型的復雜系統的故障檢測.
PCA 用于故障檢測方法是建立在穩定工況的基礎上,對于核動力裝置這種經常變工況(穩定-過渡-穩定)的情形,采用某單一主元模型進行檢測會產生模型不適用問題,容易出現誤診或漏診.本文采用一種動態多主元模型的檢測方法,用于變工況情況下傳感器的故障檢測.
1 主元分析方法
使用傳統的PCA 方法進行故障檢測的方法是:(l)獲取某一工況下的穩態數據,得到變量的統計信息,包括變量均值向量、變量方差矩陣、協方差矩陣、負載矩陣等,并將變量進行標準化處理以便建立此工況下的PCA 模型;(2)在線利用PCA 模型計算平方預測誤差Q 統計量和T2統計量檢測故障.由于T2統計量代表的只是與主元顯著相關的那些過程變量的信息,而Q 統計量則代表的是所有被監測變量的(誤差)信息,更能反映故障情況.黃孝彬等[2]通過300 MW 鍋爐給水系統數據進行分析,認為在進行故障檢測時T2指標弱于Q 指標;另外,Dunia等[3]在進行傳感器故障檢測時,并沒有采用T2指標,只使用了Q 指標,應用效果良好.再者,本文在在進行故障檢測時先對工況進行判斷,剔除過渡過程,傳感器發生了故障的情況易于判斷.因此,本文只采用Q 統計量進行故障檢測.
Q 統計量定義為[4]
式中:X∈RN×m為標準化后的樣本數據矩陣;P 為載荷矩陣,P=[Pl,P2,…,Pn],其列向量Pi為X的協方差矩陣的特征值λi所對應的單位特征向量,n為主元個數,t∈Rn是得分向量;I 為m×m的單位陣.給定一個顯著性水平α,可以得到Q 統計量的控制限
2 動態多主元分析方法
對于變工況的情形,采用某單一主元模型進行檢測會產生模型不適用問題,這里主要表現為隨著工況的變化,變量的均值,方差變化明顯,如二回路蒸汽發生器給水流量、蒸汽流量、蒸汽壓力等;另外隨著工況變化,變量之間的相關性(表現為協方差)也隨之發生變化.因此,采用動態多主元模型進行傳感器的故障檢測:(1)用模糊C-均值聚類方法[5-7]對過程的歷史數據進行分類,得到各穩定工況下的正常歷史數據;(2)利用分類數據建立相應的主元模型;(3)在故障檢測中,首先利用穩定性因子分析方法[8]判斷是否為穩態工況,如果處于過渡過程工況則停止檢測;(4)當過程進入一個穩態工況后,根據模糊系統動態計算出一個與當前工況匹配的主元模型,并對檢測樣本進行故障檢測.
2.1 主元模型組的建立
給定一個涵蓋大部分工況的歷史數據X∈RN×m(假設都已標準化處理),假設其包含W 個穩態工況和G 個過渡工況,通過穩定性因子判別去掉過渡工況,然后用模糊C-均值聚類方法將保留的穩態數據按照工況分成W 個不同的子集,用W 個子集建立W 個不同的主元模型,按照工況的高低構成一個主元模型組.一個主元模型對應一個穩態工況,因此,相對于單一主元模型,主元模型組可以更全面的描述整個過程.下面給出穩定性因子的定義和模糊C-均值聚類的方法介紹.
對于給定的變量Z,穩定性因子方法定義如下

式中:Z1為變量Z 在一滑動窗口內的最大值;Z2為最小值;Zm為樣本數據的均值.當穩定性因子較小時表明處于穩定狀態,當穩定性因子較大時則處于過渡狀態.計算過程中,取SF 的閾值為2.
假設穩態工況的樣本數為H,模糊C-均值聚類的目的是把穩態工況下的H 個樣本劃分到C個類別中去,使各樣本與其所在類的均值的誤差平方和最小.C-均值聚類算法需要事先給出期望的分類數目,一般情況下這個條件比較難滿足,然而對于工況的數據分類可以根據特征變量的分析比較容易得到需要分類的數目.
定義聚類的一般目標函數描述為
式中:μik=μXi(xk)為樣本xk與子集Xi(1≤i≤C)的隸屬關系;w 為加權指數,一般取2.dik為樣本與第i類的聚類中心ρi 之間的距離

聚類準則為取Jω(U,ρ)的極小值min{Jω(U,ρ)},使得Jω(U,ρ)為最小的μik值為
式中:Ik={i|dik=0},使得Jω(U,ρ)為最小的ρi值為
2.2 動態PCA在線故障檢測
在工況的過渡過程中變量的統計特性會發生較大變化,這時使用穩態工況下建立的主元模型進行故障檢測必然帶來誤診.因此在故障檢測過程中必須先判定過程的運行狀態,如果處于工況的過渡過程中則停止檢測并將統計量賦值為零,待過程進入穩態工況后繼續進行檢測.使用負荷指令變量的穩定度因子來判斷過程的狀態.
當過程處于穩態時,需要根據當前工況為新檢測樣本匹配一個合適的主元模型來進行檢測.主元模型匹配的過程依據樣本對所劃分類的隸屬度來判別,其過程如下[9]:(1)樣本矩陣的標準化,將數據變換到[0,1]區間,采用平移-極差變換;(2)建立樣本的模糊相似矩陣,采用相關系數法;(3)聚類,采用直接聚類法,當樣本對某類的隸屬度大于0.8時則劃分為該類.
然后用得到的動態主元模型中的均值向量和方差矩陣對檢測樣本進行標準化,使用動態主元模型中的負載矩陣和協方差矩陣按照式(1)計算Q 統計量,進而實現故障檢測.
3 應用實例
核動力裝置的運行過程是典型的變工況過程,其工況隨負荷的變化不斷變化,以核動力裝置連續升負荷系統為例說明多主元模型在核動力裝置傳感器故障檢測中的應用.反映核動力裝置運行的參數主要有26個,見表1.

表1 主要過程變量
選取一段時間的連續運行數據作為建模數據,采樣間隔為1s,工況特征變量選擇核功率、蒸汽流量、尾軸轉速.先對數據進行分類得到5類數據樣本集,分別為樣本集1、樣本集2、樣本集3、樣本集4和樣本集5,分別對應工況2,工況3,工況4,工況,5和工況6等運行工況,并建立相應的主元模型.選取一段包含工況變化的連續運行數據,其包含5個穩態工況和5個過渡過程,其歸一化數據的變化趨勢見圖1.
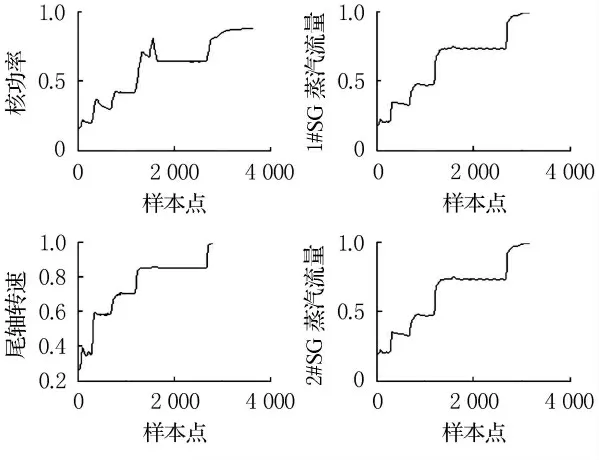
圖1 工況特征變量變化趨勢圖
尾軸轉速這一特征變量的穩定性因子最能表征工況的變化,穩定性因子變化見圖2.從圖中可以看出,穩定工況下其穩定性因子小于2,過渡過程的穩定性因子較大.剔除掉過渡過程工況,只保留穩態工況下的數據,并將其分類,聚類的目標函數變化趨勢見圖3.
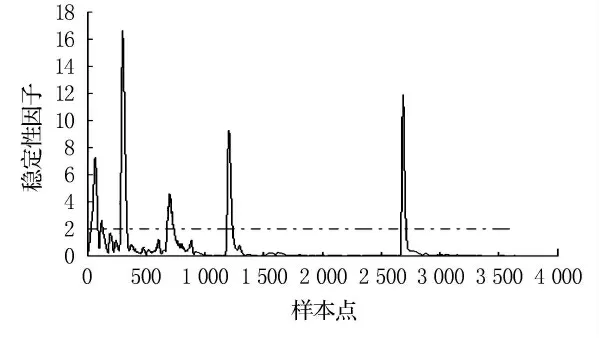
圖2 變工況的穩定性因子變化趨勢
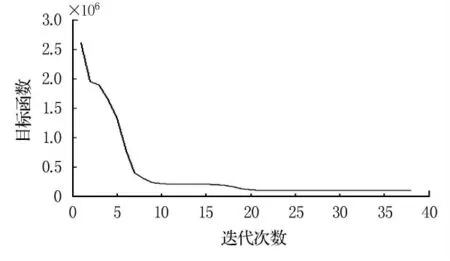
圖3 目標函數的變化趨勢
下面通過實驗檢驗該方法的有效性.
試驗1在過程運行正常時,檢驗過渡過程工況對檢測結果的影響,見圖4.經計算的PCA分析過程中,最大的4個特征值分別為16.6527,5.3028,2.1900,0.9986,所有特征值的和為26.0000,其主元貢獻率為96.71%,當貢獻率超過85%時候即可取其為主元,考慮到計算復雜程度與數據的代表性,取主元個數為4.
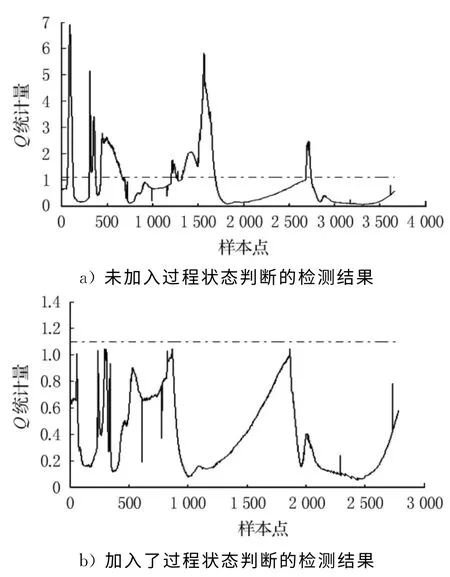
圖4 過渡過程對檢測結果的影響
圖4a)為未考慮過渡過程時的檢測結果,其中虛線為置信度為99%時統計量的控制限值.圖4b)為考慮過渡過程的監測結果.從圖4a)中看出,正常情況下,未加入對過渡過程的判斷,出現了誤診;從圖4b)中看出,在加入了過渡過程判斷后,診斷結果正常,避免了誤診.
試驗21#SG 蒸汽流量(隨工況的變化而變化)傳感器出現故障時的檢測結果,在第500個采樣點時在蒸汽平均溫度上疊加5%的恒偏差來模擬傳感器故障.檢測結果見圖5.

圖5 蒸汽流量傳感器發生故障后的檢測結果
從圖5a)中可以看出,未加入過程狀態判斷時,前500個采樣點雖然為正常狀態但是出現了誤診,后面的采樣點則檢出了故障狀態;從圖5b)常數據的采樣點數據只有265個,檢測結果為正常,疊加了故障后,由于去除了過渡過程,數據也有所減少,故障被檢測出來.并且比較圖5a)和圖5b)可以知,由于采用了動態主元模型,發生故障時對故障的檢測更靈敏,反映在圖中就是圖5b)中Q 的幅值比圖5a)的更大.
4 結束語
變工況情況下,傳統的PCA 模型用于傳感器的故障診斷存在模型不適應問題,利用PCA 的Q統計量進行檢測,過渡過程情況下容易出現誤診斷;對過程進行穩定性分析剔除掉過渡過程后將數據進行分類,利用動態多主元分析方法根據數據類型的不同建立不同穩態工況下的主元模型,使得模型更適應不同的工況,不會出現誤診;由于模型更適應實際工況,對故障的檢測也更靈敏.
該方法雖然解決了不同穩態工況的模型適應問題,但前提是剔除了過渡過程,對于過渡過程中傳感器的故障檢測問題依然沒有解決,有待進一步研究.
[1]RICARDO H D,JOE Q S,THOMAS F E.Multivariable process monitoring using nonlinear approaches[C]//Proceedings of the American Control Conference,1995:756-760.
[2]黃孝彬,牛 征,牛玉廣,等.利用主元方法進行傳感器故障檢測的行為分析[J].傳感技術學報,2003,16(4):419-423.
[3]RICARDO H D,JOE Q S,THOMAS F E,et al.Identification of faulty sensors using principal component analysis[J].AICHE Journal,1996,42(10):2797-2812.
[4]孫嬌華.基于主元分析傳感器故障檢測、辨識與重構的研究[D].沈陽:沈陽化工學院,2003.
[5]陳 凱,朱 杰,王豪行.復雜系統故障診斷中的模糊聚類方法[J].上海交通大學學報,1998,32(6):61-64.
[6]劉建敏,劉艷斌,喬新勇,等.基于模糊聚類與神經網絡的柴油機技術狀態評價方法研究[J].內燃機學報,2008,26(4):379-383.
[7]聞 新,周 露,李東江,等.Matlab模糊邏輯工具箱的分析與應用[M].北京:科學出版社,2001.
[8]DORR R,KRATZ F,RAGOT J.Detection,isolation,and identification of sensor faults in nuclear power plants[J].IEEE Trans on Control Systems Technology,1997,5(1):42-60.
[9]謝季堅,劉承平.模糊數學方法及其應用[M].武漢:華中科技大學出版社,2006.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
汽車維修與保養(2019年7期)2020-01-06 03:30:42
光學精密工程(2016年6期)2016-11-07 09:07:19
汽車維護與修理(2016年10期)2016-07-10 08:17:41
海峽科技與產業(2016年3期)2016-05-17 04:32:12