基于主成分分析和神經網絡的目標識別*
2012-01-01 05:51:06陳新來
現代防御技術 2012年2期
陳新來
(海軍蚌埠士官學校,安徽蚌埠 233012)
0 引言
戰爭條件下,目標屬性信息的獲取具有很大的不確定性,更使得海戰場目標的識別面臨很大的困難。能否對目標進行準確快速識別關系到戰場的勝負,各國都致力于目標識別技術的研究。目前采用的目標識別方法主要有基于隸屬度和D-S理論的目標識別[1-3]、基于貝葉斯網絡的目標識別[4]、模糊聚類和模糊模式識別[5]、圖像融合的目標識別[6]和一些智能方法[7-8]等。這些方法綜合運用目標的物理特征和戰術特征對目標進行識別將可以提高對目標類型識別的準確性和科學性,但同時也增加了指標的復雜性和綜合分析的難度。隨著傳感器技術的發展使海戰場可以獲得的目標信息空前廣泛,涉及運動特征、電磁特征、聲響特征、影像特征等各個方面,將傳感器得到的信息全部用于對目標的識別,冗余信息的加入使得識別復雜性增加,識別速度大大減慢,無關信息的加入甚至會使目標識別中出現較多的誤判。而海戰場態勢分析對目標的識別速度與準確度要求是很高的。
可以將統計分析與神經網絡結合起來,首先運用多元統計分析中的主成分分析法對海上目標的多項指標進行綜合聚集,將海上目標繁雜的高維價值指標濃縮為互不相關的低維指標來處理,借助神經網絡學習能力強,而且有一定的泛化能力的特點,能夠對未在樣本中出現的目標進行正確識別。提高識別速度和準確度。
1 基于主成分分析和BP神經網絡的海戰場目標識別
1.1 主成分分析用于屬性聚集
主成分分析(principal component analysis,PCA)是一種通過降維技術把多個變量化為少數幾個主成分(即綜合變量)的統計分析方法。這些主成分能夠反映原始變量的絕大部分信息,它們通常表示為原始變量的某種線性組合。主成分分析的一般目的是變量的降維和主成分的解釋。海戰場目標識別中采用主成分分析法進行屬性聚集的步驟如下:
Step 1: 計算相關系數矩陣
式中:R 為實對稱矩陣;rij(i,j=1,2,…,p)為原變量xi與xj之間的相關系數。
Step 2: 計算特征值與特征向量
Step 3: 計算主成分貢獻率及累計貢獻率
主成分zi的貢獻率為
累計貢獻率為
一般累計貢獻率達85% ~95%的特征值λ1,λ2,…,λm所對應的第一、第二,…,第 m(m≤p)個主成分。
1.2 基于BP神經網絡的海戰場目標識別
人工神經網絡(artificial neural network,ANN)在神經解剖學、神經生理學以及神經元的電生理過程等研究基礎上,借助數學和物理方法從信息處理的角度對人腦神經網絡進行抽象,建立簡化模型[9-10]。在模式識別/分類中BP網絡應用最廣泛,是前饋網絡的核心。用于海上目標識別的BP神經網絡設計方法如下。
Step 1: 確定網絡層數
BP神經網絡可以包含不同的隱層,理論上已經證明,在模式樣本相對較少的情況下,較少的隱層節點,可以實現模式樣本空間的超平面劃分,此時選擇兩層BP網絡就可以了;當模式樣本數很多時,減小網絡規模增加一個隱層是必要的,但BP網絡隱層數一般不超過兩層。采用主成分分析法與BP神經網絡進行識別時采用兩層BP網絡。
Step 2: 確定輸入層與輸出層節點數
輸入層節點數等于輸入矢量的維數即主成分數。輸出層節點數為待分類模式總數,此時對應第j個待分類模式的輸出為

即第j個節點輸出為1,其余輸出均為0。而以輸出全為0表示拒識,即所輸入的模式不屬于待分類模式中任何一種模式。
Step 3: 隱層節點數
對于一個具有無限隱層節點的兩層BP網絡可以實現任意從輸入到輸出的非線性映射。但對于有限個輸入模式到輸出模式的映射,并不需要無限個隱層節點。對于模式識別/分類的BP網絡,根據經驗可以參照如下公式進行設計:

式中:n為隱層節點數;ni為輸入節點數;n0為輸出節點數;a為1~10之間的常數。
Step 4: 傳輸函數
BP網絡中傳輸函數通常采用S(sigmoid)型函數:

采用BP網絡進行模式識別,一般采用S型函數。因此在進行海戰目標識別時,采用S型函數作為神經網絡的傳遞函數。
Step 5: 訓練方法
BP網絡學習方法很多,這些方法具有自己的特點。理論和實踐證明將彈性BP算法(resilient back-PROPagation,RPROP)進行訓練應用于模式識別時,其速度是最快的[11-12]。同時,為了提高 BP 網絡的泛化能力,采用提高BP網絡泛化能力的策略。進行海上目標識別采用RPROP算法進行訓練以提高網絡收斂速度和識別效率,同時采用提前終止法提高網絡的泛化能力。
將各主成分的得分作為神經網絡的輸入進行訓練,各種優化策略的采用使得算法具有較高的收斂速度和泛化能力。然后用訓練好的神經網絡對已知樣本和未知樣本進行識別來測試算法的有效性。
2 海戰場識別屬性的確定及目標類型的劃分
海戰場用于目標識別的技術手段主要有雷達、ESM、光電傳感器和雷達成像技術[11]。綜合利用這些傳感器可以得到關于戰場目標的多種信息。由這些傳感器得到的海戰場目標的屬性主要包括:巡航速度、雷達反射面積、編隊數量、電磁特性、發現距離、航跡類型等。選取這些特性作為識別屬性,將這些屬性標準化后用于海上目標的識別。
通過對海戰場目標的特性分析,將海戰場目標分為以下四類:
I類:該類目標為航母、巡洋艦。屬于大型目標。
II類:該類目標為驅逐艦、護衛艦。是各國海軍主要作戰艦艇。
III類:該類目標為巡邏艇、快艇。這類目標大都運動速度快,機動性強。
IV類:該類目標為偵察船、測量船、商船、漁船等。這類目標對我威脅度較小,一般運動較慢,航跡較固定。
3 算例仿真
根據以往的資料積累可以得到一些目標屬性及目標識別結果,如表1所示。
將樣本數據標準化(歸一法)后采用主成分分析法計算相關系數矩陣的特征值與貢獻率,如表2所示。
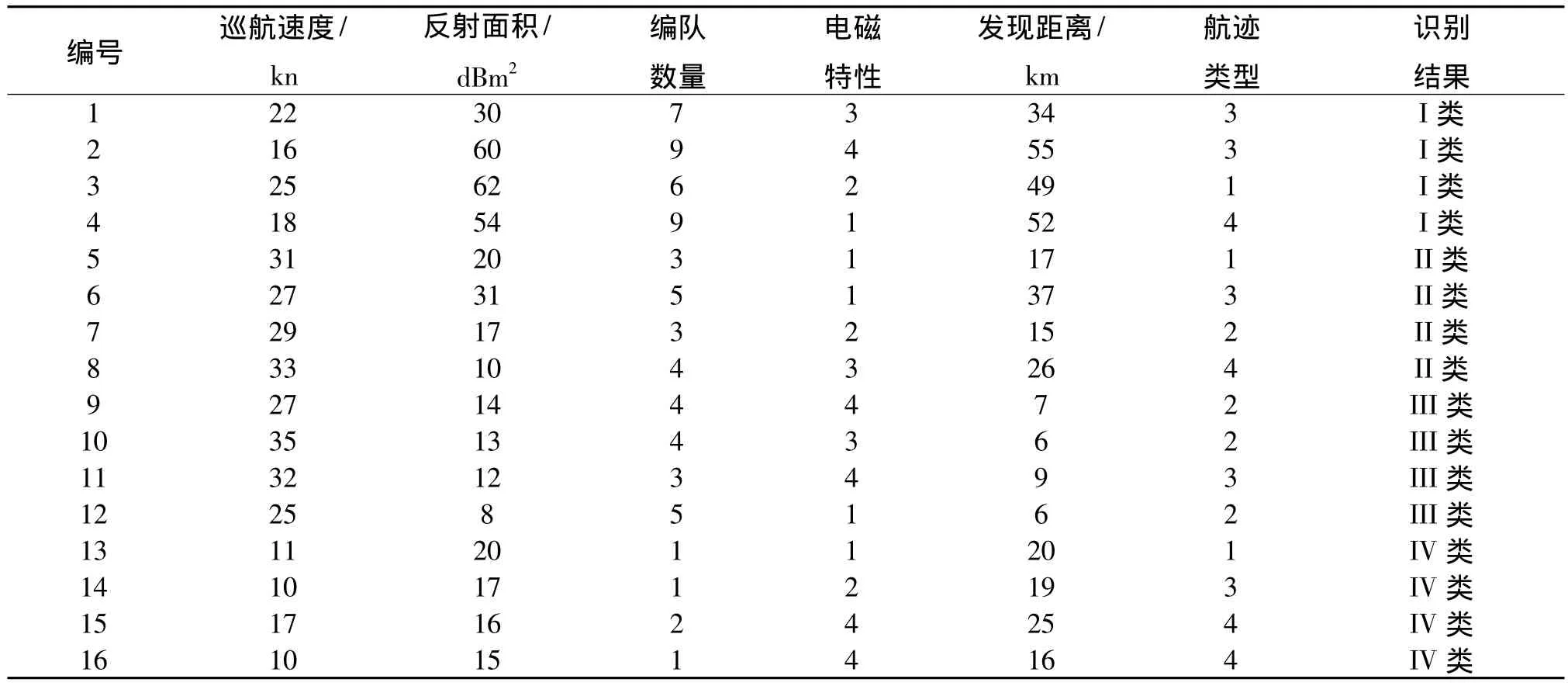
表1 目標識別樣本Table 1 Sample of target recognition

表2 相關系數矩陣的特征值及貢獻率Table 2 Eigenvalue of the correlation coefficient matrix
將各屬性貢獻率與累計貢獻率表示為圖1,2。
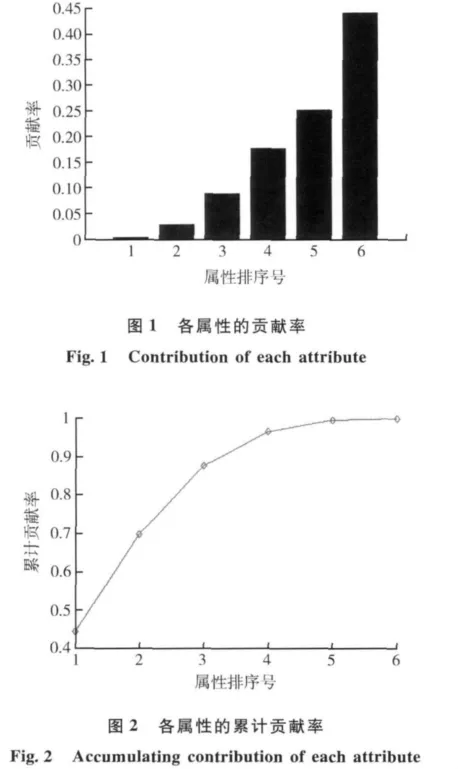
若取累計貢獻率閾值δ=0.85,則有3個主成分,得分矩陣為S。
用得分矩陣訓練建立好的BP神經網絡,得到誤差下降曲線和目標識別結果如圖3,4。
對訓練結束后的網絡進行測試,可以對樣本進行100%準確率的識別。對新發現的目標進行識別結果如表3所示。
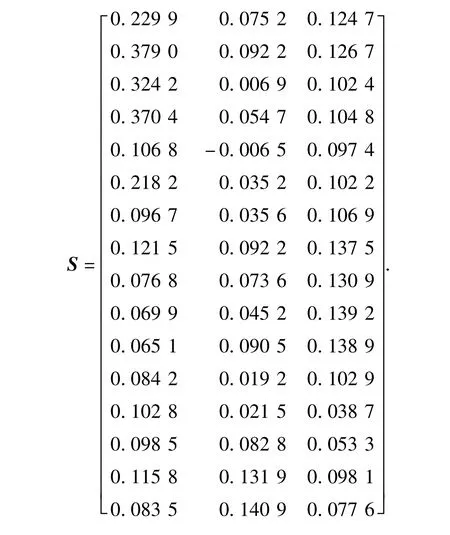
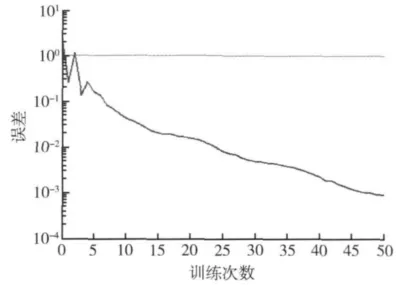
圖3 神經網絡訓練誤差下降曲線Fig.3 Curve of error descending
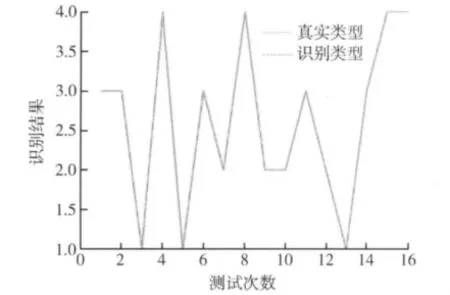
圖4 測試樣本識別正確度Fig.4 Testing of the arithmetic
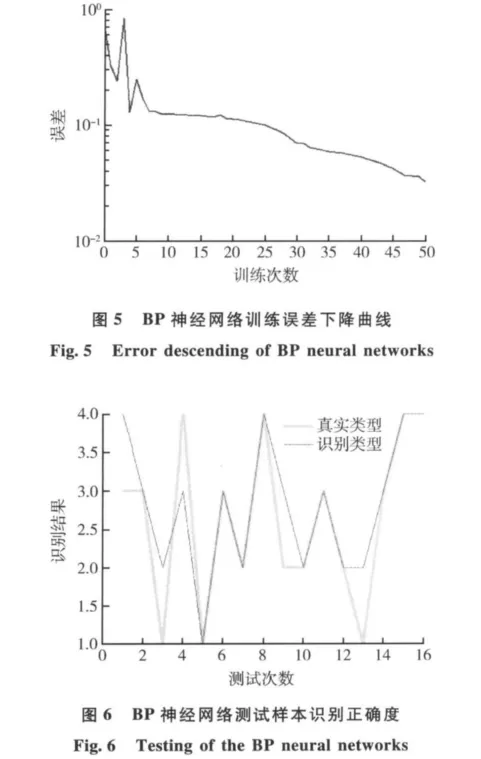
將基于主成分分析法和神經網絡的目標識別算法與沒有經過屬性聚集后作為輸入的神經網絡識別算法進行對比。神經網絡在相同訓練算法和優化策略下,2種網絡同時訓練50次。沒有經過屬性聚集的神經網誤差下降曲線和目標識別結果分別如圖5,6 所示。

表3 目標識別測試Table 3 Target recognition testing
雖然對樣本經過了主成分分析法和神經網絡的2次計算,但由于主成分分析法去除了對識別貢獻率小的屬性,使識別維度大大降低,加快了神經網絡的收斂速度,而主成分分析法的算法相對簡單。仿真結果表明,經過2次運算,計算時間度并無大的改變。同時由于這些時間僅在神經網絡訓練期間產生,而不會影響到識別階段,因此,該方法在時間復雜度上具有一定的優勢。
4 結束語
采用基于主成分分析和神經網絡的海戰場目標識別方法能夠將多項識別屬性進行綜合聚集,各種優化策略的使用使神經網絡具有較快的收斂速度和很高泛化能力。主成分分析與神經網絡的結合既能減少識別屬性,有效利用多項識別指標又能具有較快的識別速度和很強的自學能力,并具有一定的泛化能力。這種識別方法非常適合戰場條件下目標屬性不易獲取或獲取不完全的情況,可以有效的對海戰場目標進行識別。最后通過對比仿真試驗證明了該方法的有效性。
[1] 牛鵬飛,王晟達,馬健.基于隸屬度和D-S理論的雷達目標識別方法[J].微計算機信息,2007,23(11):218-220.
[2] 姚欽,肖明清.基于證據理論的交互式目標識別算法[J].系統工程與電子技術,2005,27(27):592-596.
[3] 李玉榕,蔣靜坪,楊富文.基于神經網絡的D-S證據理論應用于多傳感器目標識別[J].儀器儀表學報,2001,22(6):652-655.
[4] 肖秦琨.基于貝葉斯網絡的海上目標識別[J].微機發展,2005,15(10):152-154.
[5] 眭志方,張冰,朱志宇,等.模糊聚類和模糊模式識別在目標識別中的應用[J].電光與控制,2007,14(4):35-38.
[6] 劉松濤,周曉東,楊紹清.圖像融合系統研究現狀[J].電光與控制,2007,14(5):14-18.
[7] BRYANT A,BRYANT J.Recognizing Shapes in Planar Binary Imagers Pattern Recognition[C]∥ Proc.Int.Comput.Symp.,1989:155-164.
[8] 李飚,李吉成,沈振康.一種基于神經網絡的紅外目標識別方法[J].系統工程與電子技術,1999,21(2):39-47.
[9] 朱大奇,史慧.人工神經網絡原理及應用[M].北京:科學出版社,2006.
[10] MAGALI R,MEIRELES G,PAULO E,et al.Comprehensive Review for Industrial Applicability of Artificial Neural Networks[J].IEEE Trans on Industrial Electronics,2003,50(3):585-601.
[11] GEVREY M,DIMOPOULOS I,LEK S,et al.Review and Comparison of Methods to Study the Contribution of Variables in Artificial Neural Network models[J].Ecological Modelling,2003,160(1):249-264.
[12] 王強,胡維平,胡建平,等.基于幾何不變性和BP網絡的二維目標識別算法[J].北京航空航天大學學報,2001,27(4):413-416.
