基于貝葉斯網絡的空中目標意圖識別方法*
2012-01-01 05:51:06朱波方立恭張小東
現代防御技術 2012年2期
朱波,方立恭,張小東
(海軍大連艦艇學院a.研究生管理大隊;b.導彈與艦炮系,遼寧 大連 116018)
0 引言
在現代防空作戰中,對空中目標的作戰意圖進行識別不僅是戰場態勢評估的主要目的,更是防空作戰指揮決策的重要基礎。隨著空中威脅的日益嚴峻,單純依靠指揮員的作戰經驗對空襲目標的作戰意圖進行識別已經難以適應防空作戰高強度、快節奏的要求,如何利用先進的數據融合技術輔助指揮員識別敵方的作戰意圖,已經成為目前戰場態勢評估迫切需要解決的問題[1-3]。
1 目標意圖識別問題概述
1.1 目標意圖識別的定義
目標意圖即目標試圖完成的任務或目標為達到某種作戰目的而采取的一系列作戰行動和計劃。目標意圖并不能被直接觀測,通過各種探測手段,能直接觀測到的只是目標的特定作戰行動或目標狀態的改變,而這些活動則反映了目標的作戰意圖[4]。對敵作戰意圖的識別就是在戰場環境下對各種信息源得到的信息進行分析,從而對敵方的作戰設想、作戰方式、作戰計劃以及要達到的目標進行的判斷和解釋[5]。
1.2 基于事件的目標意圖識別
由于目標意圖總會在一定程度上通過目標的行動和狀態表露出來,因此對目標的意圖識別可以從以下幾個方面考慮:
(1)目標的運動狀態;
(2)戰場上發生的事件;
(3)敵作戰條令及戰術原則。
可以說,目標意圖總是和某些事件相關聯,反之,通過發生的事件也可以推理出相應的目標意圖,而這正是意圖識別的基礎。在防空作戰中,敵目標在作戰過程中會不斷出現加(減)速、拐彎、爬升、俯沖、雷達開(關)機等行為變化,這些行為都可能反映目標實際的作戰意圖,將這些行為稱之為事件。在這些事件中,有些可以被直接探測,稱為原子事件;而另外一些則是由其他具有時間或因果關系的事件聚合而成的,這些事件不能被直接探測,稱之為復合事件。
為研究方便,本文對原子事件進行了分類定義。根據事件表達內容的不同,原子事件可分為過程事件、狀態改變事件和實體關系事件。過程事件反映的是實體屬性在一定時間間隔內的變化量,如目標加(減)速、拐彎、爬高、俯沖等,以目標加(減)速事件為例,當目標速度在相鄰探測時間間隔內的變化值超過規定的判別門限時,即判定事件發生,過程事件與時間相關,具有一定的連續性;與過程事件不同,狀態改變事件反映的是實體狀態瞬時的變化,如目標出現、消失、干擾源開(關)機、雷達開(關)機等,狀態改變事件不受時間積累的影響,即與目標之前的狀態無關;實體關系事件反映的是目標與我方實體之間的關系,如目標進入我防空武器射擊區域、我方實體位于敵導彈發射角內等。
復合事件是由其他事件關聯得到的,其組成可以是原子事件,也可以是復合事件,從這個意義上說,復合事件是具有層次性的。舉例來說,在防空作戰中,敵飛機對我進行導彈攻擊可以看作是目標意圖的一種,其本身就是一個復合事件,與之關聯的子事件至少應包含敵導彈滿足發射條件和敵雷達鎖定我目標2個復合事件,同樣,作為子事件,敵導彈滿足發射條件也是由若干事件關聯得到的,其中應包含我實體位于敵導彈發射角內和我實體在敵導彈射程內這2個原子事件。可見,無論是原子事件還是復合事件都不是互相孤立的,它們之間存在著時間和因果關系,事件關聯的目的就是利用事件之間的關系將低層次的原子事件逐步聚合成高層次的復合事件,而目標意圖識別就是在事件關聯的基礎上,從原子事件(證據)出發,逐層推理,最終得到代表目標意圖的復合事件(結論)的過程。
2 空中目標意圖識別的貝葉斯網絡模型
2.1 貝葉斯網絡的構成
貝葉斯網絡(Bayesian networks,BN)是概率論和圖論相結合的產物,作為一種知識表示和概率推理的框架,貝葉斯網絡在具有不確定性的推理和決策問題中得到了廣泛的應用[6]。貝葉斯網絡主要由兩部分構成,分別對應問題領域的定性描述和定量描述:一部分為有向無環圖(directed acyclic graph,DAG),通常稱為貝葉斯網絡結構,它由若干個節點和連接節點的有向弧組成,節點與知識領域的隨機變量一一對應,有向弧表示變量間的因果關系,弧的指向代表因果影響的方向性(由父節點指向子節點);另一部分為反映變量之間關聯性的局部概率分布,通常稱為條件概率表(conditional probability table,CPT),表中的概率值表示子節點與其父節點之間的關聯強度或置信度[7-8]。圖1顯示的是一個簡單而典型的貝葉斯網絡模型。
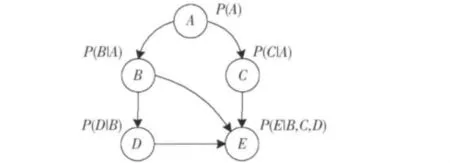
圖1 Bayesian網示例Fig.1 Sample of Bayesian network
2.2 貝葉斯網絡的構建
構建空中目標意圖識別的貝葉斯網絡模型,需要經過以下3個步驟:
(1)確定節點及節點狀態
對于空中目標意圖識別來說,節點代表的就是防空作戰中可能發生的事件。在現實中,事件的發生常常具有多種情況,相應的,網絡中的節點也可以有多個狀態,這些狀態之間彼此獨立,每個都代表了一種假設。舉例來說,如果將“敵飛機對我地面目標的攻擊方式”作為意圖識別的頂層事件,那么它對應的節點就可能包含“使用導彈攻擊”和“使用投彈方式攻擊”2種狀態。
(2)確定節點關系
在確定了節點事件之后,接下來需要明確的是各個節點事件之間的因果關系。這些關系用有向弧表示。例如,當敵飛機意圖對我進行投彈攻擊(記為事件X)時,通常會先進行俯沖(記為事件Y),基于這種影響關系,如果將前者作為“原因”,那后者就是“結果”,兩者之間的關系可以用有向弧X→Y表示。
(3)節點概率分配
概率分配包括兩部分內容:對沒有父節點的頂層事件指定先驗概率;對有父節點的事件指定條件概率,如圖1所示。需要說明的是,對于有多個狀態的節點,其概率分布應包含該事件處于相應狀態集合中每個狀態的概率值。節點概率通常在網絡初始化時由防空作戰專家根據經驗指定,這一過程使貝葉斯網絡模型從一開始就包含了相關的領域知識。
2.3 基于貝葉斯網絡的目標意圖識別
在利用貝葉斯網絡進行問題求解時,那些值已確定的變量構成的集合稱為證據D,需要求解的變量集合稱為假設X,基于貝葉斯網絡的目標意圖識別就是求解給定證據(已發生的戰場事件)的條件下假設變量(目標意圖)的后驗概率P(X|D)[9]。
設防空作戰中敵目標可能的作戰意圖為A1,A2,…,Am,當探測到戰場事件B時,利用貝葉斯條件概率公式,可得目標意圖的后驗概率[10]為
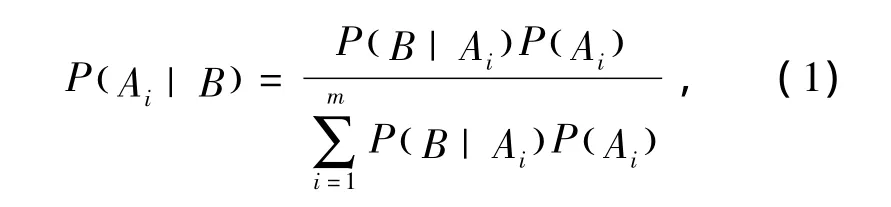
式中:P(Ai)為目標意圖的先驗概率;P(B|Ai)為條件概率,先驗概率和條件概率都是由防空專家根據經驗預先指定的。
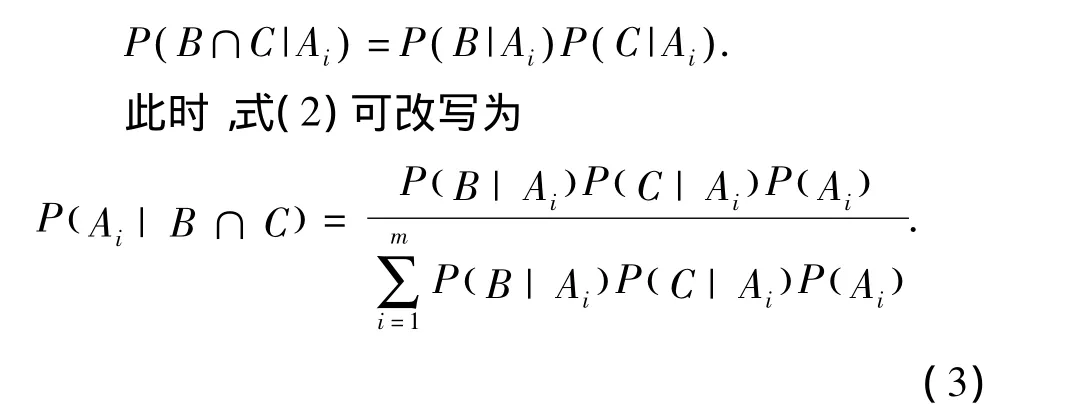
假如在探測到事件B時,又得到一個事件C,則此時目標意圖的后驗概率為

實際上,在進行目標意圖識別時,僅僅根據經驗確定事件B和C同時發生的先驗概率P(B∩C|Ai)是非常困難的。為了簡化計算,可以假設戰場事件之間是相互獨立的,通過對目標意圖識別問題進行分析可知,大部分戰場事件都應該是相互獨立的(如“敵飛機爬高”和“敵飛機俯沖”),這一點也可以在構建網絡過程中通過指定節點事件來實現。
根據概率公式,B,C相互獨立,可得
推廣到一般情況:當探測到的戰場事件分別為B1,B2,…,Bn時,可得目標意圖的后驗概率為

在網絡初始化時,目標意圖和戰場事件的置信度都是預先給定的,當檢測到新的戰場事件后,事件(證據)對目標意圖(假設)的影響可通過貝葉斯后向傳播來更新,直到目標意圖中的某個假設(節點狀態)的置信度超過了預先設定的閾值,則判定該目標意圖成立。目標意圖識別是一個動態的、按時序處理的過程,其識別可信度隨時間的增長而提高。
3 應用示例
3.1 貝葉斯網絡建模
考慮這樣一個想定:敵飛機進攻我地面目標,其進攻意圖分為“投彈攻擊”和“使用導彈攻擊”2個狀態,與之相關聯的事件分別是敵飛機的機動方式、雷達工作狀態以及敵飛機與我方目標的位置關系。根據想定,可以建立圖2所示的目標意圖識別的貝葉斯網絡。
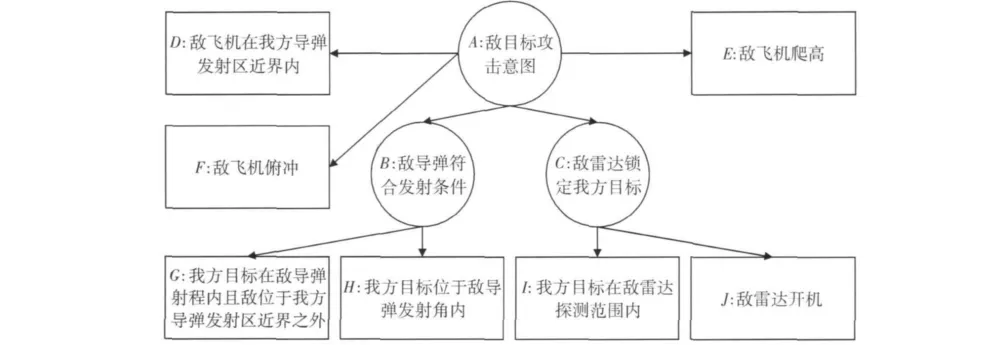
圖2 目標意圖識別的貝葉斯網絡模型Fig.2 Bayesian network model of target’s intention assessment
為了體現復合事件和原子事件的層次關系,圖中分別用了2種節點進行表示:復合事件用圓形節點表示,原子事件用方形節點表示。另外需要說明的是,本例的主要目的在于方法研究,因此模型經過了適當的簡化,并沒有對所有與目標意圖有關的事件進行窮舉。
3.2 節點概率分配
在進行節點概率分配時,除代表目標意圖的節點以外,其他事件節點可以只考慮2個離散狀態,即真和假。在對網絡進行初始化時,需由防空專家指定每個節點的條件概率表,本例假定敵目標攻擊意圖的先驗概率為:敵對我進行投彈攻擊和使用導彈向我攻擊的概率均為0.5。其余節點的條件概率可按相同方法依次指定,分配結果見表1。
3.3 目標意圖識別
假設在防空作戰中,我傳感器探測到以下事件:敵飛機爬高、敵雷達開機、我方目標在敵雷達探測范圍內、我方目標在敵導彈射程內且敵位于我方導彈發射區近界之外。利用貝葉斯網絡推理工具Bayesialab計算得到的敵目標意圖的后驗概率如圖3所示。
結果表明,當檢測到敵飛機爬高、雷達開機等戰場事件后,敵方使用導彈向我攻擊的置信度變為89.17%,相比證據輸入前明顯增大了。

表1 目標意圖識別的條件概率Table 1 Conditional probability of target’s intention assessment

圖3 仿真結果Fig.3 Result of simulation
4 結束語
貝葉斯網絡使用圖形化的模型對領域知識進行表達,同時通過具有語義性的推理邏輯對問題進行求解,作為一種推理模型,貝葉斯網絡在處理不確定性信息方面具有優勢,因而能夠很好的滿足目標意圖識別的需求。本文提出的基于貝葉斯網絡的空中目標意圖識別方法具有很強的可操作性,將其應用到實踐中,可以大大提高防空作戰指揮決策的自動化程度,因此具有十分重要的意義。
[1] HATAKEYA N,FURUTA K.Bayesian Network Modeling of Operator’s Intent Inference[C]∥New Orleans,USA:IEEE 7th Human Factors Meeting,2002:55-60.
[2] GORODETSKY V,KARSAEV O,KOTENKO I.Multiagent Information Fusion:Methodology,Architecture and Software Tool for Learning of Object and Situation Assessment[C]∥San Diego,CA,USA:Proceedings of the 7th International Conference on Information Fusion,2004:346-353.
[3] BALL B,SANTOS E,BROWN S.Making Adversary Decision Modeling Tractable with Intent Inference and Information Fusion[C]∥Sevilla,Spain:Proceedings of the 11th Conference on Computer Generated Forces and Behavioral Representation,2002:535-541.
[4] NGUYEN T,HEUER P.Automated Intent Assessment Simulation Environment[C]∥ Las Vegas:Proceedings of Information,Decision and Control,2002:395-400.
[5] 王端龍,吳曉鋒,冷畫屏.對敵戰場意圖識別的若干問題[J].艦船電子工程,2004,24(6):4-8.
[6] 王三民,王寶樹.貝葉斯網絡在戰術態勢評估中的應用[J].系統工程與電子技術,2004,26(11):84-87,143.
[7] 史忠植.知識發現[M].北京:清華大學出版社,2002.
[8] 張連文,郭海鵬.貝葉斯網引論[M].北京:科學出版社,2006:34-35.
[9] 吳霽.態勢評估關鍵技術的研究[D].西安:西安電子科技大學,1996.
[10] 肖秦琨,高嵩,高曉光.動態貝葉斯網絡推理學習理論及應用[M].北京:國防工業出版社,2007.
