單脈沖測角在BM突防干擾機上的應用*
2012-01-01 05:51:06陳方予崔曉東吳建軍郝昀
現代防御技術 2012年2期
陳方予,崔曉東,吳建軍,郝昀
(1.北京機電工程總體設計部,北京 100854;2.江蘇省教育考試院,江蘇南京 210024)
0 引言
彈道導彈(ballistic missile,BM)彈頭突防時,常使用伴隨式突防干擾機產生多假目標信號,干擾反導雷達對進攻彈頭的探測。
隨著雷達探測能力的提高,寬帶高分辨雷達(high-resolution radar,HRR)檢測接收信號的HRRP(high-resolution radar range profile)特性[1],利用回波信號的HRRP特征鑒別回波信號性質。
先進的反彈道導彈(anti-ballistic missile,ABM)系統常使用寬帶HRR,用以識別在HRRP上與真彈頭回波信號不一致的末修艙回波信號、發動機碎片回波信號、電子點假目標信號和球形誘餌回波信號等非彈頭回波信號[2]。由此要求BM突防干擾機能夠針對HRR反導雷達產生具有與BM彈頭回波信號一致的HRRP特征的多假目標信號。
BM突防干擾機生成包含BM彈頭HRRP特征的假目標信號時,需要知道探測雷達觀測BM彈頭的觀測角,進而確定BM彈頭HRRP的長度、前點徙動范圍和多普勒調制等 HRRP參數[3-4]。
雷達觀測角的測量可使用電子無源測向系統進行測量[5-8],其中包括使用無源單脈沖測角系統[9]。
當BM突防干擾機與BM彈頭有相同的攻角,即相對探測雷達有相同姿態角時,此時如果BM突防干擾機能夠使用無源單脈沖測向系統測出探測雷達的照射角,則測得的雷達照射角與雷達探測BM彈頭的觀測角有對應關系,干擾機可據此得到BM彈頭HRRP的長度。
BM突防干擾機使用時由突防干擾裝置在空中釋放。釋放時,釋放裝置將對干擾機進行授姿和運動參數加載(包括釋放方向、釋放姿態、分離速度、旋轉速度等)。
用于穩定空間飛行器姿態的三維姿態穩控系統通常有較大的體積和質量(如BM使用的三維慣組和姿態修正系統),難以在BM突防干擾機上應用。BM突防干擾機通常自身沒有姿態測量、姿態調整和姿態穩控裝置。釋放時,為防止因釋放力不均和后續可能受到擾動而引起的干擾機整體側滾,干擾機采用慢速自旋方式與釋放裝置分離,將因釋放力不均和后續可能受到的擾動產生的測向轉動能量轉化為章動能量,維持自身姿態角的基本穩定。
無源測向系統測得的雷達到達角(angle of arrival,AOA)是相對測量平臺的。自旋轉動下的BM突防干擾機若使用二維無源單脈沖測向系統測量雷達AOA,因測量平臺隨干擾機自旋轉動,此時雖能實時測量雷達AOA,但因干擾機不能實時確定自身測量坐標系與雷達觀測平面之間的關系,測得的雷達AOA難以與雷達觀測角對應起來,因此在缺少姿態測量裝置情況下,自旋轉動的BM突防干擾機使用二維無源單脈沖測向系統測量雷達觀測角將受到干擾機自旋轉動的限制。
注意到BM突防干擾機自旋轉動的特點,若使用一維無源單脈沖測角系統測量雷達AOA,測得的雷達AOA將隨干擾機自旋呈周期性變化,如果在BM突防干擾機一個自旋周期內測得的雷達AOA數據變化是單調的且有穩定的最大值和最小值,同時最大值或者最小值能夠與雷達觀測角對應起來,那么這樣干擾機就能夠實現對雷達觀測角的測量,下面探討這種方法的可行性。
1 旋轉一維無源單脈沖測角系統測量雷達觀測角
1.1 旋轉一維無源比相單脈沖測角系統測量雷達觀測角
假定BM突防干擾機與進攻的BM彈頭有相同的攻角,即兩者相對探測雷達有相同的姿態角,這是BM突防干擾機能夠測量雷達觀測角的前提。如果不能保證BM突防干擾機與BM彈頭相對探測雷達有相同的姿態角,那么干擾機測得的雷達AOA與雷達觀測BM彈頭的觀測角之間將可能沒有相對明確或者穩定的關系,測得的雷達AOA對模擬BM彈頭HRRP也就可能難以提供準確的雷達觀測角參數。
實際中,BM彈頭具有調姿和穩控裝置(包括自旋),可通過調姿和穩控裝置調整和穩定自身姿態。BM突防干擾機目前雖然較難具備空間二次自定姿能力,但通過釋放裝置釋放時的授姿和自旋轉動也可以取得和穩定自身的飛行姿態,工程上,通過合理的設計可以實現兩者相對探測雷達有基本一致的姿態角。
BM突防干擾機可采用一維無源比相單脈沖測角系統(干涉儀)測量雷達 AOA[10-11]。圖 1示意了干擾機測角基準軸AB,BM彈頭和觀測雷達三者間的相對位置關系。
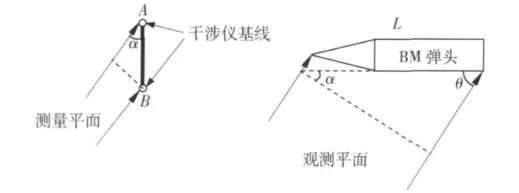
圖1 干擾機測角基準軸AB,BM彈頭和觀測雷達間相對位置關系Fig.1 Relation among jammer’s angle measure benchmark axis,BM warhead and detecting radar
雷達觀測BM彈頭時,左右兩端視線與彈軸構成觀測平面,設觀測視線與彈軸夾角為θ,BM彈頭長度為L,則BM彈頭在雷達觀測方向上的投影長度為Lcos θ,這個長度是BM突防干擾機生成BM彈頭回波信號中HRRP特征時需要的參數。
雷達觀測角θ只與BM彈軸(或干擾機軸)與雷達觀測視線間的夾角有關,與兩者具體相對位置無關,只要求出θ值,可不必關心θ角的具體方向。
圖1中,測角基準軸AB隨干擾機自旋在與紙面垂直的平面內以AB軸中點為中心旋轉。AB軸和雷達照射線構成測量平面,測得相對AB軸的雷達AOA為α。由于AB軸隨干擾機自旋轉動,測得的雷達AOA數值將隨干擾機自旋呈周期性變化。
如圖1所示,當干擾機測量雷達AOA的測量平面與雷達觀測BM彈頭的觀測平面共面時,α與θ互余,即α+θ=π/2。據此:若能根據一維干涉儀測角基準軸轉動的特點提取出干擾機測量雷達AOA的測量平面與雷達觀測BM彈頭的觀測平面共面時的雷達AOA,就可得到雷達觀測BM彈頭的觀測角θ,下面探討其可行性。
旋轉的一維干涉儀測角系統與探測雷達之間的幾何關系如圖2所示。
設:探測雷達位于P點位置;干涉儀測角基準軸AB以O點為圓心逆時針轉動;PQ為P點到AB旋轉面的垂線,干擾機軸線為 OO',PA=x,PO=d,AO=r。
△ABP構成干擾機測量雷達AOA的測量平面。
△POO'構成雷達觀測BM干擾機(BM彈頭)的觀測平面。

圖2 旋轉一維干涉儀測量雷達AOAFig.2 Revolving one-dimension interferometer measure radar AOA
因為 PQ∥OO',所以 P,Q,O,O'4 點共面,即PQ在觀測平面內。
在△AOP中,根據余弦定理有

注意到實際上 x?r,因此 cos α'x>0,即cos α↗。對應0~π間的α,α↘,即α隨x單調遞增而遞減。
AB轉向A'B'期間,QA'單調遞減,PQ不變,x單調遞減,cos α單調遞減,α單調遞增,轉至A'B'時,α遞增至接近π/2。AB轉過A'B'繼續轉向BA期間,x仍然單調遞減,α仍然單調遞增,α遞增至接近πα,取得最大值。當AB轉過BA位置,繼續向AB轉動時,x單調遞增,α單調遞減,α向最小值靠近。
設測角基準軸AB與OQ共線時測角系統測得的雷達AOA為α0,當AB軸轉至A'B'位置時,設轉角為β。經計算,得到測角基線在A'B'位置時測得的雷達 AOA(α)滿足關系式:cos α =cos α0cos β。圖3給出了α0=π/3,β在0~π之間變化時對應的α仿真計算值。

圖3 α0=π/3,β=0~π,α仿真計算值Fig.3 α simulation value while α0=π/3,β =0~π
由此可見,當測角基準軸AB與OQ共線時,即AB的延長線過Q點時,干涉儀測得的雷達AOA(α0)最小。
△ABP為測量平面,△POQ為觀測平面,AB與OQ共線時,測量平面與觀測平面重合,此時測得的雷達AOA值最小,這個最小值α與雷達觀測BM干擾機(BM彈頭)的觀測角θ互余。
由上討論可以看到,當一維干涉儀測角基準軸隨干擾機轉動一圈后,測得的雷達AOA最小值的余角就是雷達觀測BM干擾機(BM彈頭)的觀測角θ。
一維干涉儀測角系統設計時,可使用雙平衡混頻器構成鑒相器,鑒相器可只鑒出PA,PB路徑引入的到達波相位差,無需分清兩路信號相位的相對前后關系,因此干涉儀測角基準軸只要轉動半圈就可以得到雷達AOA的最小值。
為避免出現測角模糊,BM突防干擾機應采用短基線干涉儀測角系統,即A,B兩天線間的距離需小于探測雷達信號波長的1/2。當BM突防干擾機前端結構允許時,可適當考慮增加一個相距較遠一點的第3個天線,以提高測角精度。
1.2 旋轉一維無源比幅單脈沖測角系統測量雷達觀測角
BM突防干擾機可采用一維無源比幅單脈沖測角系統測量雷達AOA[10-11]。圖4示意了干擾機測角差波束、BM彈頭和探測雷達三者間相對位置關系。
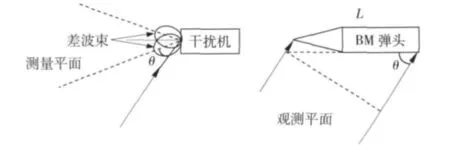
圖4 干擾機測角差波束、BM彈頭和探測雷達間相對位置關系Fig.4 Relation among jammer’s angle measure difference beam,BM warhead and detecting radar
一維比幅單脈沖測角系統中測角天線兩個差波束電軸構成測量雷達AOA的測量平面,測量平面隨干擾機自旋而旋轉。
根據比幅單脈沖測角原理和立體幾何關系,采用如上分析方法,可以得到:當測量平面旋轉到與雷達觀測平面共面位置時,比幅單脈沖測角系統給出雷達AOA最大值,這個最大值等于雷達觀測BM干擾機(BM彈頭)的觀測角θ。
由上可見,BM突防干擾機使用一維無源單脈沖測角系統(包括比相單脈沖和比幅單脈沖測角系統),根據測角系統旋轉的特點,在干擾機自旋半周時間內能夠得到雷達AOA的最大值和最小值,同時得到的雷達AOA最大值或者最小值與雷達觀測BM彈頭(BM干擾機)的觀測角有直接對應關系,據此可得到雷達觀測BM彈頭的觀測角。
BM突防干擾機使用一維無源單脈沖測角系統,通過測量雷達AOA,可得到雷達觀測BM彈頭的觀測角,然后根據事先已知的彈頭長度L即可算出彈頭HRRP的長度,再根據彈頭幾何和材料不連續點位置、彈頭質心位置、章動角、錐旋速度等參數,計算出需要模擬的彈頭HRRP中強散射點個數、位置,前點徙動速度和范圍、多普勒調制等HRRP特征,生成多個包含BM彈頭HRRP特征的回波信號,干擾制導雷達對進攻彈頭的檢測。
2 工程意義
BM突防干擾機使用一維無源單脈沖測角系統測量雷達AOA時,由于干擾機自旋,測得的雷達AOA數值呈周期性變化,其中最大值和最小值是需要的參數,但最大值和最小值得到的時間呈間斷的周期性。
實際中,BM彈頭和BM突防干擾機相對探測雷達是運動的,干擾機需要實時生成包含BM彈頭HRRP特征的信號發送給探測雷達。注意到BM突防干擾機得到的雷達觀測角是不連續的,具有步進離散性,因此干擾機發送給探測雷達的假目標信號HRRP長度是步進離散的,但如果這種具有步進離散長度的HRRP信號對模擬BM彈頭HRRP特征影響不大,能夠基本滿足要求,那么這種做法還是有一定工程意義的。
BM突防干擾機使用一維無源比相單脈沖測角系統時,由于BM突防干擾機體積受限,不易使用長基線測角系統,易使用短基線測角系統。短基線測角系統的測角精度比長基線測角系統低,與比幅單脈沖測角系統相近,設其為6°。
假設BM突防干擾機自旋速度為2 rad/s,雷達探測脈沖周期為1 ms。
干擾機自旋轉動1/2 rad需時間0.25 s。0.25 s時間內干擾機測得的雷達AOA信號數量為250個。在1/2 rad(對應最大180°)角域內,測角系統可達到的角分辨力為 180°/250=0.72°,小于測角系統精度6°,BM突防干擾機自旋對測量雷達觀測角影響較小。
假設BM突防干擾機和BM彈頭飛行速度馬赫數為5,0.25 s時間內干擾機和彈頭飛行直線距離為412 m,若BM彈頭和BM突防干擾機距反導雷達距離為100 km,如圖5所示。則412 m橫向移動距離引起的觀測角變化量Δα=(412 m/100 km)×(180/π)=0.23°,對模擬 BM 彈頭 HHRP 長度影響較小。

圖5 干擾機移動對模擬BM彈頭HRRP影響Fig.5 Effect jammer moving on simulating BM warhead HRRP
設BM突防干擾機的章動角為15°左右,單脈沖測角系統的測量精度和干擾機自旋產生的測角誤差均比章動角小,對干擾機測量雷達觀測角影響不大。影響測量雷達觀測角精度的主要因素是干擾機的章動,因為干擾機的章動將引起測角天線旋轉平面的傾斜,干擾機天線旋轉平面傾斜將使得干擾機測得的雷達觀測角與雷達實際觀測BM彈頭的觀測角之間存在誤差,對一些不采用自旋穩控的BM彈頭,如果BM彈頭章動角小,而BM突防干擾機章動角過大,則干擾機測得的雷達觀測角可能呈現較大起伏,進而需要對測量數據作平滑處理,干擾機章動周期大于自旋周期,數據平滑處理需要時間,這樣可能會影響干擾信號的實時性,應盡可能地減小干擾機的章動角。
實際中,在BM彈道中段,BM彈頭和BM突防干擾機距反導雷達較遠(如100 km),在一個雷達觀測角提取時間內(如0.25 s),因BM彈頭和BM突防干擾運動產生的雷達觀測角變化較小,對BM突防干擾機生成BM彈頭HRRP長度影響較小。
由上可見,BM突防干擾機根據自身自旋特點,使用一維無源單脈沖測角系統測量反導雷達觀測角,進而確定BM彈頭HRRP長度,這種做法目前理論上是可行的,且有一定的實際工程意義。
3 結束語
BM突防干擾機根據自身自旋的特點可使用一維單脈沖測角系統測量反導雷達觀測角。這種方法有效的前提是BM突防干擾機和BM彈頭相對探測雷達有基本一致的姿態角,而若使兩者相對探測雷達有基本一致的姿態角,則需要干擾機釋放時釋放裝置對干擾機有正確的授姿(包括釋放角度、釋放速度和起旋速度等),同時干擾機通過自旋穩定姿態角時應有比較小的章動角。小的干擾機章動角可提高干擾機測量雷達觀測角的準確度。減小干擾機章動角的方法除釋放干擾機時盡量減小釋放力的不均勻性,盡量做到平穩釋放外,還可適當提高干擾機的自旋速度。干擾機自旋速度增加,在相同側滾能量下,干擾機的章動角會相對小些[12],另外,提高干擾機自旋速度還可縮短提取雷達觀測角時間,增強干擾信號的實時性。
綜上所述,雖然目前BM突防干擾機使用一維無源單脈沖測角系統測量反導雷達觀測角有要求BM彈頭與BM突防干擾機有基本一致的姿態角以及干擾機章動影響雷達觀測角測量結果的缺點,但從工程上來看,這種方法目前還是具有一定實際意義的。
[1] Donald R Wehner.High-Resolution Radar[M].Second Edition.London:Artech House Boston,1995.
[2] 李寶柱,袁起,何佩錕,等.一種利用寬帶信號對彈道目標成像和跟蹤的方法[J].系統工程與電子技術,2009,31,(7):1588-1591.
[3] 袁莉,陶巍.彈道導彈目標的距離像特征與特性分析[J].制導與引信:目標特性專刊,2009,30(2):7-10.
[4] 陳方予,崔曉東,李明,等.BM彈頭雷達一維像干擾初探[J].現代防御技術,2011,39(1):145-151.
[5] 孫仲康,周一宇,何黎星.單多基地有源無源定位技術[M].北京:國防工業出版社,1996.
[6] 董志榮.單站單目標被動定位與跟蹤的數學理論[J].艦船科學技術,1996,(4):17-27.
[7] 郭福成,孫仲康.方向角及其變化率的單站無源定位的可觀測性[J].系統工程與電子技術,2002,24(9):30-32.
[8] 何友,關欣,衣曉.純方位二維運動目標的不可觀測性問題研究[J].系統工程與電子技術,2003,25(1):11-14.
[9] 司錫才,趙建民.寬頻帶反輻射導彈導引頭技術基礎[M].哈爾濱:哈爾濱工程大學出版社,1996.
[10] Merrill I Skolnik.雷達手冊[M].王軍,林強,米慈中,等,譯.北京:電子工業出版社,2003.
[11] 丁鷺飛,耿富錄.雷達原理[M].3版.西安:西安電子科技大學出版社,2002.
[12] 屠善澄.衛星姿態動力學與控制:第1卷[M].北京:中國宇航出版社,1999.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
家庭影院技術(2017年9期)2017-09-26 03:41:45
