基于多層模糊Petri網的編隊空戰戰術決策
2011-08-27 13:12:32孫體忠孫金標
電光與控制 2011年11期
孫體忠, 孫金標
(空軍指揮學院,a.研究生大隊; b.科研部,北京 100097)
0 引言
編隊空戰是現代空戰的主要形式,也是未來空戰的發展趨勢,它與單機空戰相比,最顯著的差別在于多機之間的戰術協同。編隊空戰戰術決策過程中,編隊指揮員面臨巨大的決策壓力,其不僅要準確把握戰場態勢變化,還要能夠根據空戰進程和態勢變化迅速調整編隊攻防戰術,同時確保對編隊指揮控制的連續性。為減輕編隊指揮員的決策壓力,提高決策效率,機載戰術輔助決策系統已成為研制新一代戰機的迫切需求。當前,對編隊空戰戰術決策問題的研究主要集中于復雜系統理論[1]和現代智能技術[2],但在實際應用中始終面臨由于決策因素多而導致系統復雜性增強,以及系統的非結構性導致決策推理復雜的現實問題[3]。
模糊Petri網(Fuzzy Petri Net,FPN)是一種用網狀圖形表示系統建模的方法,它能以網圖的形式簡潔地表示系統中的并行、同步、沖突和因果等關系,易于通過構造的模型來分析系統的性能,已被應用于故障診斷[4]和誤差評估[5]、智能決策[6-7]等方面,并取得了很好的效果。文獻[8]提出利用FPN建模實現超視距空戰戰術的模糊推理決策。模糊Petri網(FPN)發揮了模糊推理和Petri網的優點,能夠很好地利用先驗知識和專家知識進行多準則推理,推理不僅具有直觀形象的優點,而且也使得推理的實時性得以實現[9]。但FPN存在不能適應知識庫擴展和更新的問題,以及存在不能利用面向對象和結構化方法對復雜知識庫進行建模的不足。因此,針對編隊空戰戰術決策問題,使用多層模糊 Petri網(Hierarchical Fuzzy Petri Net,HFPN)方法對知識庫進行建模,通過利用抽象庫所和抽象變遷的結構化方法來提高模型對復雜知識的表示能力,以降低編隊空戰戰術決策的復雜性。
1 多層模糊Petri網(HFPN)
1.1 基于HFPN的知識庫建模過程
復雜決策知識分析和HFPN的建模過程是一個逐漸增補和反復完善的過程。參考文獻[6],HFPN建模的主要步驟如下:1)分析決策系統并確定決策系統的層次關系;2)創建初始HFPN,初始HFPN是一個最高層次的抽象系統,系統狀態和行為分別由抽象的庫所和變遷表示;3)分析決策知識,建立規則庫;4)將抽象的庫所和變遷逐步精細化為協調一致的FPN,并集成所有的子網,調整模型的總體結構,檢查知識庫行為;5)檢查、完善模型,當模型達到要求,知識庫的建模過程結束,否則轉至第4)步;6)模型簡化,為了簡化計算,用模塊合并方法和“補弧”運算對模型進行簡化,“補弧”連接輸入庫所和變遷,表示邏輯“非”回路。
1.2 推理算法
FPN的結構可用八元組來表示:FPN=(P,R,I,O,H,θ,γ,C)。其中:P={p1,p2,…,pn}是一個有限庫所集合;R={r1,r2,…,rm}表示變遷集合;I:P×R→{0,1}為n×m輸入矩陣,表示庫所與規則之間的映射關系,當 pi到 ri之間存在有向弧時,I(pi,rj)=1(i=1,2,…,n)(j=1,2,…,m),當 pi到 ri之間不存在有向弧時,I(pi,rj)=0;O:P ×R→{0,1}為 n×m 輸出矩陣,表示規則與庫所之間的映射關系,當ri到pi之間存在有向弧時,O(pi,rj)=1,當rj到pi之間不存在有向弧時,O(pi,rj)=0;H:P × R→{0,1}為 n × m 矩陣,表示從庫所到規則的補弧集合;θ:P→{0,1}為P可信度向量,它表示P與[0,1]間實數的映射,初始可信度向量記作θ0;γ:P→{0,1}為庫所中托肯的標識向量,它表示P中托肯的狀況,初始標識向量記作γ0;C=diag{c1,c2,…,cm},cj(j=1,2,…,m)為規則 rj的可信度。

2 基于HFPN的編隊空戰戰術決策模型
2.1 編隊空戰戰術決策的初始HPFN結構
一般情況下,空戰從迎頭超視距開始,隨著距離的接近,戰機可能已進入視距內空戰,也可能正處于超視距向視距內的轉換階段。特別是現代中距彈和近距彈在射程上有交叉的現象,使得某一態勢下戰機既可使用超視距空戰戰術也可使用視距內空戰戰術,所以每當空戰開始或空戰態勢發生變化時,編隊指揮員就要對進入哪種空戰樣式進行選擇。當選擇進入超視距空戰或視距內空戰樣式后,編隊指揮員要根據空戰態勢確定當前是組織進攻還是組織防御,即對編隊戰術意圖進行決策;空戰樣式和戰術意圖確定后,編隊指揮員進一步根據敵我相對態勢和攻擊狀態對編隊使用什么戰術進行決策;當選擇進入超視距轉視距內空戰樣式后,編隊戰術意圖即為接近敵機,此時編隊指揮員直接對使用什么樣的轉換戰術進行決策;若威脅較大或其他原因需要退出戰斗則指揮編隊退出戰斗。
根據上述對編隊空戰戰術決策過程的分析,基于HFPN的建模思想,定義編隊空戰戰術決策HFPN中的抽象輸入(輸出)庫所和抽象變遷,見表1,并對抽象庫所和抽象變遷之間的層次化結構關系進行分析,建立編隊空戰戰術決策的初始HFPN結構,如圖1所示。該初始HFPN結構由3個層次共8個子模塊組成:第1層為編隊空戰樣式決策層,即為空戰樣式決策子模塊(Mode1);第2層為編隊空戰戰術意圖決策層,包括超視距和視距內戰術意圖決策子模塊(Mode2,Mode3);第3層為編隊戰術決策層,包括超視距攻擊/防御反擊戰術決策子模塊(Mode4/Mode5)、超視距轉視距內戰術決策子模塊(Mode6)和視距內攻擊/防御反擊戰術決策子模塊(Mode7/Mode8)。
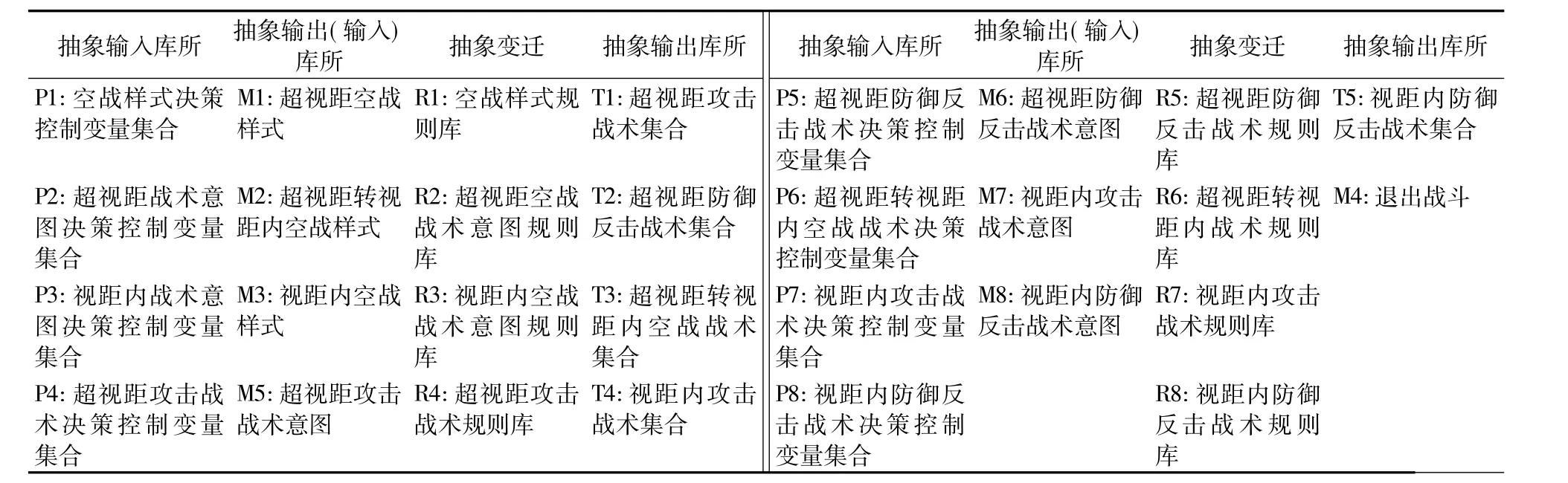
表1 HFPN中的抽象庫所和抽象變遷Table 1 Abstract places and abstract transitions in HFPN
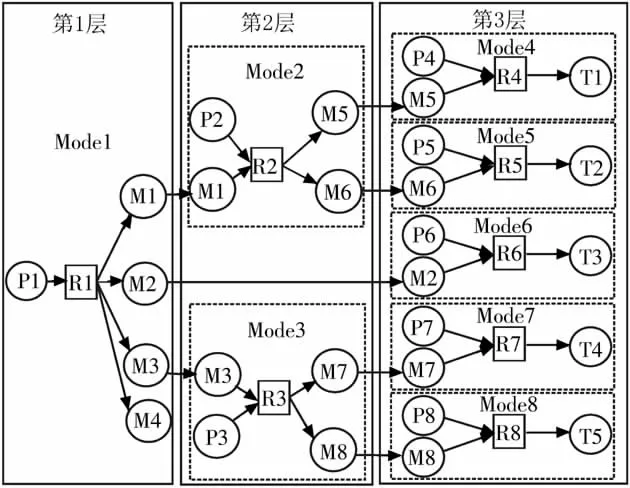
圖1 編隊戰術決策的初始HFPN模型Fig.1 Initial HFPN model of tactical formation decision-making
2.2 編隊空戰戰術決策規則的提取
編隊空戰戰術決策規則采用“if…then”的表達式,決策規則的提取步驟如下:1)根據戰術理論和專家經驗選取決策控制變量并確定其隸屬函數;2)確定模糊語言變量的取值;3)分析決策結果;4)提取戰術決策規則并給出規則的可信度。
影響戰術決策的控制變量由許多定量指標和定性指標共同組成。確定控制變量的模糊隸屬函數時:對于越大越好的指標,其隸屬函數采用F分布中嶺形分布的偏大型;對于越小越好的指標,其隸屬函數采用F分布中嶺形分布的偏小型;對于要求介于某一區間的指標,其隸屬函數采用F分布中正態分布的中間型。
3 基于HFPN的“二對一”空戰戰術決策實例驗證
編隊空戰通常以四機和雙機為戰術編隊,而四機編隊在空戰過程中又將分為兩個雙機編隊,所以,編隊空戰戰術決策的研究重點是雙機編隊戰術決策問題。雙機編隊空戰包括“二對二”和“二對一”兩種形式,但實際空戰中“二對二”空戰在戰術應用中仍然以“二對一”空戰戰術為主。在此,將以典型的“二對一”空戰戰術決策為例,對基于HFPN的戰術決策建模方法進行驗證。
3.1 “二對一”空戰戰術規則庫
針對表1中的8個抽象變遷即決策規則庫R1~R8,通過分析“二對一”空戰戰術決策知識,經過選取決策控制變量、確定隸屬函數、確定模糊語言變量和確定決策結果屬性等環節,依據2.2節方法和步驟提取決策規則并建立相應的規則庫。由于篇幅的限制,在此不對規則庫中的詳細規則進行贅述,僅列出各規則庫對應的規則數量、控制變量和決策結果屬性,見表2。
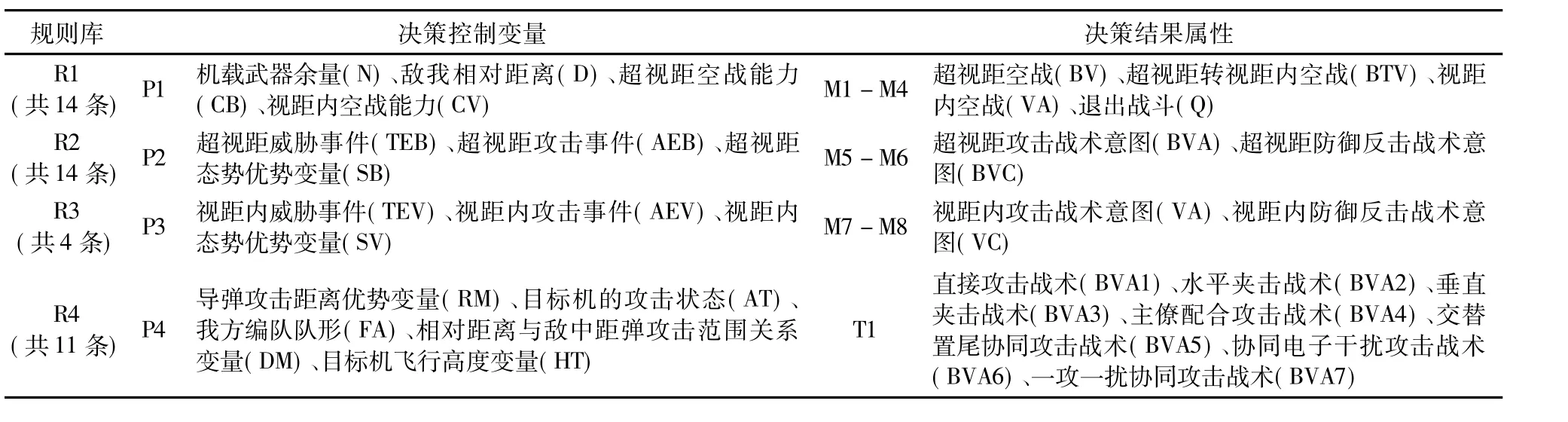
表2 決策控制變量和決策結果Table 2 Control variables and results of tactical decision-making
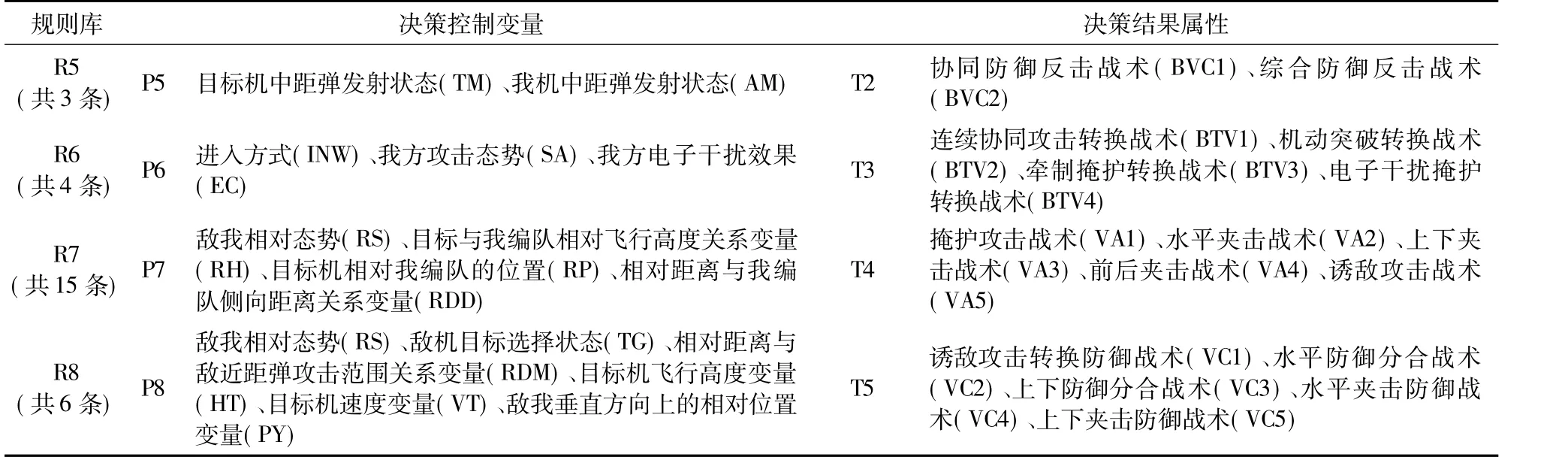
(續表2)
3.2 “二對一”空戰戰術決策的HFPN模型
在“二對一”規則庫建立的基礎上,通過上述決策控制變量和決策結果屬性分別將2.1節中的8個抽象庫所和8個抽象變遷逐步精細化為協調一致的決策子FPN。參考1.1節中HFPN的建模過程和步驟,經過集成所有的子FPN網、調整模型的總體結構、模塊合并、“補弧”運算以及對模型進行簡化等建模步驟,建立“二對一”空戰戰術決策HFPN結構,如圖2所示。

圖2 “二對一”編隊戰術決策的精細化HFPN模型Fig.2 Refined HFPN model of 2:1 tactical formation decision-making
從圖2可以看出:經過合并和精細化處理后的HFPN模型共有93個庫所和71個變遷。其中,62個純輸入庫所對應模糊控制變量,7個輸入輸出庫所對應空戰樣式決策結果和戰術意圖決策結果。24個純輸出庫所對應“二對一”空戰的編隊協同戰術;71個變遷對應71條決策規則。
3.3 算例
態勢:我方Su-27B雙機編隊與敵F-16C單機進行空戰,我雙機編成橫隊隊形,掛載中距空空導彈和近距空空導彈,飛行高度5500 m、速度255 m/s,敵機飛行高度5000 m、速度240 m/s,我長機方位角55°、進入角-55°,僚機方位角 80°、進入角 -20°,長機與敵機相距35 km,僚機與敵機相距40 km,形成迎頭態勢,雙方均未進入近距彈攻擊范圍;我長機雷達處于跟蹤狀態而未發射中距彈,敵機雷達處于單目標掃描狀態。
通過Matlab編程實現基于HFPN的“二對一”空戰戰術決策,決策結果為:第1層輸出中,{p18,p24,p29,p30}={0.9,0.0,0.0,0.0},輸出最大值 p18=0.9,即表明選擇超視距空戰樣式;第2層輸出中,{p45,p50,p60,p66}={0.81,0.0,0.0,0.0},即選擇超視距攻擊的戰術意圖;第 3 層輸出中,{…,p75,p76,p77,p78,p79,p80,p81,…}={…,0.1022,0.0,0.729,0.0,0.0,0.0,0.006,…},最大值為p77=0.729,所以最終決策結果選擇超視距攻擊戰術中的垂直夾擊戰術。
此外,選取各種空戰樣式下的10組空戰態勢數據進行驗證,分析10組態勢數據所輸出的決策結果表明:各種態勢下的決策結果符合“二對一”空戰的戰術應用規律,說明基于HFPN的編隊空戰戰術決策方法能夠對編隊空戰戰術進行有效的模糊推理決策。
4 結論
對于編隊空戰戰術決策問題,基于FPN的建模方法以網圖的形式直觀地表示了具有非結構化特征的空戰戰術決策問題,但FPN不能利用面向對象和結構化方法對復雜知識庫進行建模。為此,提出基于HFPN的建模方法,在對編隊空戰戰術決策過程的層次化結構進行分析的基礎上,利用抽象庫所和抽象變遷建立了編隊空戰戰術決策的初始HFPN模型。之后,以典型“二對一”空戰戰術決策為例進行實驗驗證表明:基于HFPN的建模方法對編隊空戰戰術決策系統進行建模,不僅可以發揮模糊Petri網基于知識的表達和邏輯推理功能,而且降低了編隊空戰戰術決策的復雜性。
[1] 楊鏡宇.分布式智能決策問題研究[D].北京:空軍指揮學院,2002.
[2] 鐘麟,佟明安,鐘衛,等.基于粗糙集-神經網絡編隊協同空戰決策系統[J].火力指揮與控制,2008,32(5):64-66.
[3] 丁全心.現代空戰中的戰術輔助決策技術[J].電光與控制,2009,16(12):1-4.
[4] 戎梅,趙廷第,郭江杰.模糊Petri網在航天發射系統故障診斷中的應用研究[J].航天控制,2009,27(4):82-87.
[5] LUO X,KEZUNOVIC M.Implementing fuzzy reasoning Petri-Nets for fault section estimation[J].IEEE Transactions on Power Delivery,2008,23(2):676-685.
[6] 伊洪冰,張春潤,劉增勇,等.模糊Petri網在裝備保障指揮決策中的應用研究[J].指揮控制與仿真,2008,30(4):99-102.
[7] DONG Zhuoning,ZHANG Rulin,CHEN Zongji.Intelligent decision-making for hazardous weather avoidance based on hierarchical fuzzy Petri nets[J].Journal of System Simulation,2008,20(19):5147-5151.
[8] 史志富,張安,劉海燕,等.基于模糊Petri網的空戰戰術決策研究[J].系統仿真學報,2007,19(1):63-66.
[9] 孫體忠,孫金標.空戰戰術雙層決策模型設計[J].電光與控制,2011,18(4):37-40,96.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
小獼猴智力畫刊(2022年3期)2022-03-29 01:09:42
數學小靈通(1-2年級)(2021年4期)2021-06-09 06:26:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
幸福(2018年33期)2018-12-05 05:22:42
Coco薇(2017年11期)2018-01-03 20:59:57
暨南學報(哲學社會科學版)(2016年9期)2017-01-15 13:52:02
光學精密工程(2016年6期)2016-11-07 09:07:19
中國科技信息(2016年14期)2016-07-31 21:16:32
