空間目標(biāo)成像原理及運(yùn)動控制
2011-06-19 04:15:28陳乾輝王小芬
長春工業(yè)大學(xué)學(xué)報 2011年5期
陳乾輝,王小芬
(1.商丘科技職業(yè)學(xué)院 機(jī)電工程系,河南 商丘 476000;2.商丘科技職業(yè)學(xué)院 計算機(jī)科學(xué)系,河南 商丘 476000)
0 引 言
近年來,隨著計算機(jī)視覺技術(shù)的飛速發(fā)展,在目標(biāo)追蹤、定位、識別及智能控制方面有了廣泛應(yīng)用。它從攝像機(jī)獲取的圖像信息出發(fā),計算三維空間中物體的幾何信息,而空間物體表面某點(diǎn)的三維幾何位置與其在圖像中對應(yīng)點(diǎn)之間的相互關(guān)系是由攝像機(jī)成像的幾何模型決定,因而完成映射到單幅或多幅圖像上的三維場景,如三維場景的重建。
運(yùn)動目標(biāo)的序列圖像跟蹤要用一種算法來實現(xiàn),然而由于其軌跡的不確定性,因此可以通過攝像機(jī)的運(yùn)動控制來實現(xiàn),即可以通過攝像機(jī)的左右平移和俯仰旋轉(zhuǎn),獲取物體的三維姿態(tài)信息進(jìn)行三維建模,得到目標(biāo)的模擬軌跡。
1 攝像機(jī)標(biāo)定
為獲得攝像機(jī)的內(nèi)部參數(shù),在大多數(shù)條件下這些參數(shù)必須通過實驗與計算才能得到,這個過程被稱為是攝像機(jī)定標(biāo)。攝像機(jī)的內(nèi)部參數(shù)指攝像機(jī)成像的基本參數(shù),如主點(diǎn),攝像機(jī)的外部參數(shù)指攝像機(jī)相對于外部世界坐標(biāo)系的方位,而攝像機(jī)標(biāo)定目的就是獲取某些內(nèi)外參數(shù)。計算機(jī)視覺中幾何模型參數(shù)就是攝像機(jī)參數(shù)。
現(xiàn)有的攝像機(jī)定標(biāo)技術(shù)大體可以歸結(jié)為兩類:傳統(tǒng)的攝像機(jī)定標(biāo)方法和攝像機(jī)自定標(biāo)方法。
傳統(tǒng)攝像機(jī)定標(biāo)方法有4類:
1)利用最優(yōu)化算法的定標(biāo)方法;
2)利用攝像機(jī)變換矩陣的定標(biāo)方法;
3)進(jìn)一步考慮畸變補(bǔ)償?shù)膬刹椒ǎ?/p>
4)采用更為合理的攝像機(jī)成像模型的雙平面定標(biāo)方法。
攝像機(jī)自定標(biāo)方法有4類:
1)利用本質(zhì)矩陣和基本矩陣的攝像機(jī)定標(biāo)方法;
2)利用絕對二次曲線和外極線變換性質(zhì)的攝像機(jī)定標(biāo)方法;
3)利用主動系統(tǒng)控制攝像機(jī)做特定運(yùn)動的自定標(biāo)方法;
4)利用多幅圖像之間的直線對應(yīng)關(guān)系的攝像機(jī)定標(biāo)方法。
總之,攝像機(jī)標(biāo)定在從計算機(jī)圖像坐標(biāo)中導(dǎo)出三維幾何信息以及由三維信息導(dǎo)出二維計算機(jī)圖像坐標(biāo)的應(yīng)用中起著重要作用。
2 攝像機(jī)成像原理
攝像機(jī)成像模型包括常用投影和針孔成像模型。常用投影又分為中心投影和平行投影,即投影射線匯聚于一點(diǎn)的投影稱為中心投影,投影射線相互平行的投影稱為平行投影。而對于三維空間物體到像平面的投影關(guān)系稱為成像模型,其中理想投影成像模型則稱針孔模型。
2.1 成像模型
在空間目標(biāo)成像模型中,為確切掌握空間目標(biāo)的姿態(tài)信息,必須將其坐標(biāo)轉(zhuǎn)換到同一坐標(biāo)系下。因此定義了3個坐標(biāo)系:O-XYZ 坐標(biāo)系是世界坐標(biāo)系,乃用戶定義坐標(biāo)系,表示場景點(diǎn)的絕對坐標(biāo)。OC-XCYCZC是攝像機(jī)坐標(biāo)系,其中,OC為攝像機(jī)光心,ZC軸與攝像機(jī)的光軸重合,取攝影方向為正向。O′xy是圖像坐標(biāo)系,表示場景點(diǎn)在圖像平面上的投影。XC軸、YC軸分別與X 軸、Y軸平行,ZC是攝像機(jī)的光軸,它與圖像平面垂直。三坐標(biāo)系之間的轉(zhuǎn)換關(guān)系見表1。
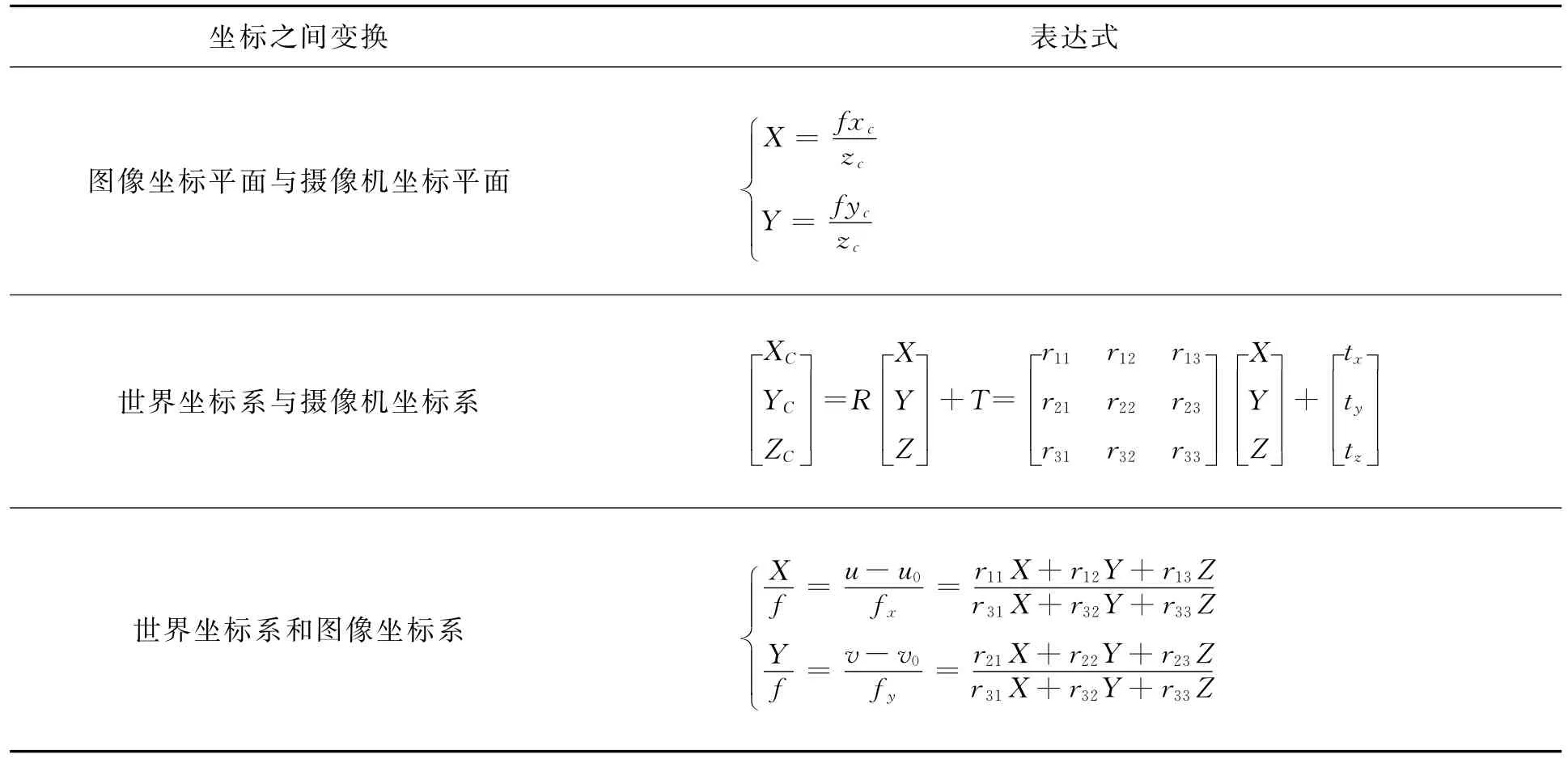
表1 坐標(biāo)轉(zhuǎn)換
物點(diǎn)、光心和像點(diǎn)三點(diǎn)共線,且fx,fy,u0,v0為攝像機(jī)內(nèi)部參數(shù),r11,r22,…,r33是正交旋轉(zhuǎn)矩陣的系數(shù)。
取f為攝像機(jī)焦距,光軸與圖像平面交點(diǎn),O′為圖像坐標(biāo)系的原點(diǎn),選取飛行器的某點(diǎn)P(X,Y,Z)作為目標(biāo)點(diǎn),在圖像平面上的投影點(diǎn)為p(x,y),成像幾何模型如圖1所示。

圖1 成像幾何模型
在不考慮攝像機(jī)鏡頭畸變的情況下,可得透視投影成像模型(其中:(x,y)為像點(diǎn)坐標(biāo),(XS,YS,ZS)為攝影中心坐標(biāo),a1,a2,a3,b1,b2,b3,c1,c2,c3為坐標(biāo)變換中矩陣元素,且當(dāng)變換關(guān)系一定時,變換矩陣元素已知)為:

2.2 極線約束
根據(jù)外極線幾何理論,三維空間一點(diǎn)在兩個像平面上的投影點(diǎn)稱為對應(yīng)點(diǎn)對,且對應(yīng)點(diǎn)對中的一點(diǎn)位于另一個點(diǎn)所確定的外極線上,如圖2所示。
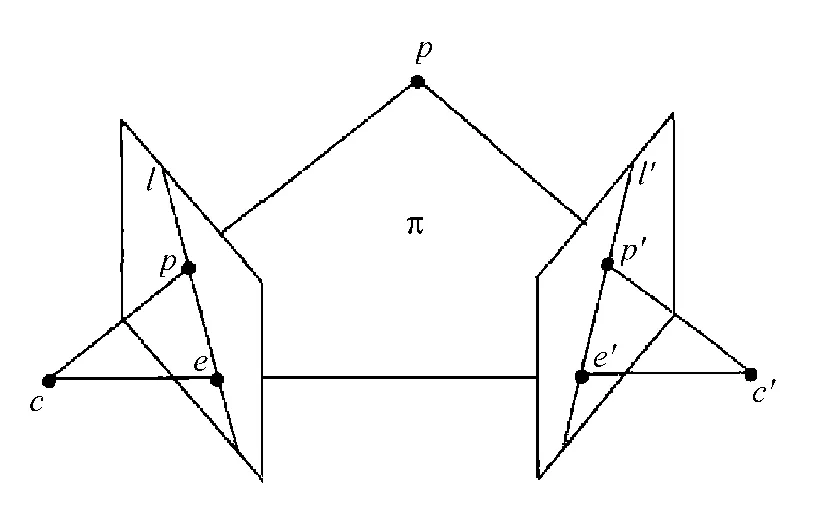
圖2 極線幾何約束關(guān)系

假定以經(jīng)緯儀C為測量坐標(biāo)系的基坐標(biāo)系,得關(guān)系式

3 攝像機(jī)運(yùn)動控制及算法實現(xiàn)
為獲得序列圖像以掌握空間目標(biāo)運(yùn)動,必須了解圖像的運(yùn)動軌跡。攝像機(jī)一般固定在光電設(shè)備上,由于光電設(shè)備圍繞地球坐標(biāo)軸左右擺動和上下俯仰,其坐標(biāo)變換相當(dāng)復(fù)雜,不適宜平移運(yùn)動,若旋轉(zhuǎn)是圍繞以圖像平面為中心的系統(tǒng),則推導(dǎo)就相對簡單。因此,根據(jù)所作用的信號,這里采用光電設(shè)備的左右平移運(yùn)動或使用攝像機(jī)的上下俯仰運(yùn)動,以獲取圖像信息。
3.1 圖像平面位置變化的影像
跟蹤系統(tǒng)的結(jié)構(gòu)和數(shù)字模型如圖3所示。

圖3 跟蹤系統(tǒng)模型
該系統(tǒng)由光電設(shè)備上的攝像機(jī)、圖像處理系統(tǒng)和控制光電設(shè)備的計算機(jī)接口3大部分組成。所需要建立的模型是描述原始圖像坐標(biāo)()和經(jīng)過擺動和俯仰運(yùn)動的圖像點(diǎn)坐標(biāo)之間的關(guān)系。
坐標(biāo)變換依賴于攝像機(jī)焦距f,左右擺動角φ、俯仰角θ和地球坐標(biāo)系原點(diǎn)與圖像平面坐標(biāo)原點(diǎn)偏移量(Tx,Ty,Tz)、原始物體點(diǎn)(x,y,z)與圖像點(diǎn)(xi,yi)之間的差,以及經(jīng)過左右和俯仰運(yùn)動的物體點(diǎn)(x′,y′,z′)與圖像點(diǎn)()之間的差值,坐標(biāo)變換見表2。

表2 擺動和旋轉(zhuǎn)坐標(biāo)變換

表3 圖像平面(物理)之間坐標(biāo)關(guān)系
3.2 攝像機(jī)運(yùn)動的控制算法
為得到偏差矢量T=(Tx,Ty,Tz)的精確值,我們對變換公式進(jìn)行了研究,發(fā)現(xiàn)當(dāng)伸縮比很大時,可以忽略該偏差影響。并由可以用逼近,忽略上述方程中的。當(dāng)很大時,得圖像平面(物理)之間坐標(biāo)關(guān)系及三維姿態(tài)角(見表3)。
4 結(jié) 語
通過攝像機(jī)成像原理以及空間目標(biāo)三維轉(zhuǎn)換模型的分析,使我們了解坐標(biāo)變換的重要作用,并由攝像機(jī)運(yùn)動控制及算法的實現(xiàn)算出了空間目標(biāo)三維姿態(tài)角,此研究對目標(biāo)特性視覺化具有重要的理論和現(xiàn)實意義。
[1]王巧華,文友先,劉儉英.我國機(jī)器視覺技術(shù)的發(fā)展前沿[J].農(nóng)機(jī)化研究,2000,11(4):16-18.
[2]張祖勛,張劍清.數(shù)字?jǐn)z影測量學(xué)[M].武漢:武漢大學(xué)出版社,1997:1-6.
[3]Armin Gruen.Digital photogrammetric stations re-visited[J].Int.Arch.Of Photo-grammetry and Remote Sensing,1996,31(B/2):127-134.
[4]張祖勛.數(shù)字?jǐn)z影測量的發(fā)展與展望[J].地理信息世界,2004,2(3):1-5.
[5]張祖勛,張劍清.數(shù)字?jǐn)z影測量在我國的發(fā)展與應(yīng)用[EB/OL].(2010-04-25)[2011-08-20].http://wenku.baidu.com/view/18a75f649b6648d7c1c74672.html.
[6]張祖勛.數(shù)字?jǐn)z影測量與計算機(jī)視覺[J].武漢大學(xué)學(xué)報:信息科學(xué)版,2004,29(12):1035-1039.
[7]袁野.攝像機(jī)標(biāo)定方法及邊緣檢測和輪廓跟蹤算法研究[D]:[博士學(xué)位論文].大連:大連理工大學(xué),2002.
[8]王之卓.攝影測量原理[M].武漢:武漢大學(xué)出版社,2007.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
兒童故事畫報(2019年5期)2019-05-26 14:26:14
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
Coco薇(2016年2期)2016-03-22 02:42:52
核科學(xué)與工程(2015年4期)2015-09-26 11:59:03
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
