多功能自確認傳感器*
2011-05-06 01:58:10趙樹延
傳感技術學報 2011年4期
王 祁,趙樹延,宋 凱
(哈爾濱工業大學電氣與自動化學院,哈爾濱150001)
傳感器是信息獲取的源頭,目前各種測試設備和自動化系統中使用的傳感器數量和種類越來越多。在很多應用場合中,需要同時監測多個物理量,例如在礦井中經常需要同時監測溫度、濕度、一氧化碳、甲烷等氣體成分;在潛艇等密閉環境中需要同時監測溫度、濕度、風速、一氧化碳濃度等。為了使用方便,人們希望能用盡量少的傳感器測量多個物理量,這種需求促進了傳感器向多功能的方向發展。如芬蘭的VAISALA公司推出的多功能天氣傳感器WXT520能夠同時測量六種物理量,包括風速、風向、降水量、壓力、溫度和相對濕度;2000年美國BELL實驗室Dodabalapur和意大利Bari大學的Torsi研制了一種基于有機薄膜晶體管(OTFT)的多功能氣體傳感器,通過測量有機薄膜晶體管的電導率、晶體管門限電壓和有效遷移率來敏感不同氣體,實現多參數測量[1]。
多功能傳感器可以有多個敏感元件集成在一個基板上,也可由多個傳感器復合而成。由于多功能傳感器測量的參數多,其結構較普通傳感器的結構復雜,因此發生故障的概率也隨之增大。傳感器一旦發生故障,輸出錯誤數據,就會影響系統工作,甚至造成災難性后果。因此人們希望了解傳感器的工作狀況是否正常,對不可靠的傳感器及時更換;同時希望當傳感器發生故障時,不輸出錯誤數據,以保證系統正常運行。
自確認傳感器是牛津大學的Henry和Clarke教授在1993年提出的一種新型傳感器,它不僅能輸出測量值,同時能夠對自身的工作性能、狀態進行在線評估[2]。但目前所研究的自確認傳感器大都是針對一種測量參數進行的,如自確認數字科里奧利流量計[3]、自確認壓力傳感器[4]等。
為了解決多功能傳感器的工作狀態確認和數據恢復問題,本文綜合多功能傳感器和自確認傳感器概念和方法,提出多功能自確認傳感器。多功能自確認傳感器具有這兩種傳感器的功能和特點,它最大優勢在于可利用被測的多種參數之間的相關信息和冗余信息進行狀態評估和數據恢復。本文將介紹多功能自確認傳感器的概念,并給出了其功能模型和實例。
1 多功能自確認傳感器的概念及其功能模型
多功能自確認傳感器具有多功能傳感器和自確認傳感器的特點。多功能自確認傳感器可以檢測多個物理量,它在輸出測量值的同時,能夠對傳感器的工作狀態進行在線評估,并以不確定度的形式指示出當前輸出的測量值所在的準確度范圍;它具有故障自診斷功能,當傳感器自身發生故障時,不僅檢測出傳感器的故障,判斷故障類型,同時能夠對輸出值進行最佳估計,并以估計值替代故障數據輸出,通過數據恢復以保障多功能自確認傳感器在一段時間內的正常輸出。多功能自確認傳感器的功能模型如圖1所示。
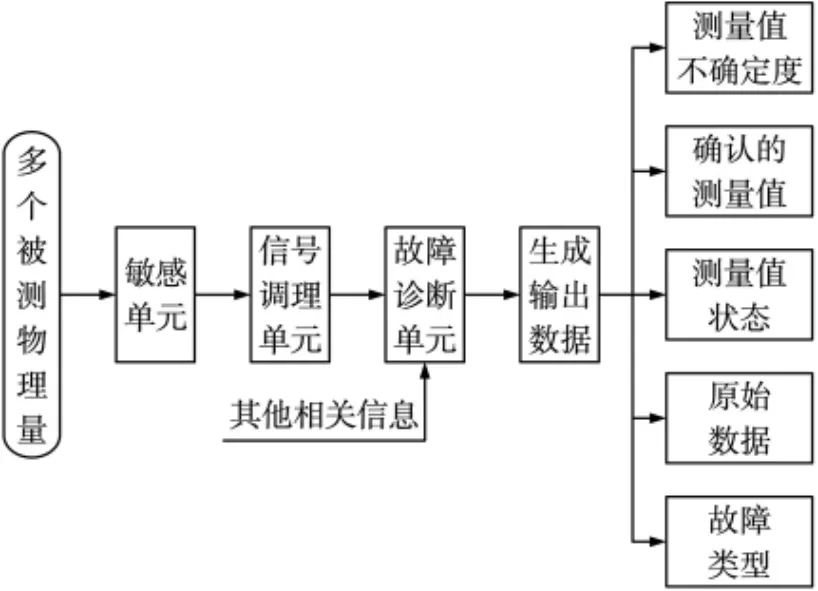
圖1 多功能自確認傳感器的功能模型
多功能自確認傳感器按功能分可以分為四個單元:敏感單元、信號調理單元,故障診斷單元和生成輸出數據單元。
(1)敏感單元:由多個敏感元件在一個基板上集成或多個傳感器復合而成,檢測多個不同的物理量。
(2)信號調理單元:這部分主要是對敏感單元輸出的信號進行放大、濾波、A/D轉換等。
(3)故障診斷單元:利用相關的信息和算法對傳感器的狀態進行評估和診斷,確認多功能自確認傳感器的工作狀態。它是多功能自確認傳感器實現狀態自確認的關鍵部分。
(4)生成輸出數據單元:根據故障診斷單元的處理結果,生成多功能自確認傳感器的輸出數據,包括確認的測量值、測量值不確定度、測量值狀態、原始數據和故障類型。
當自確認傳感器工作正常時,確認的測量值就是敏感單元的輸出;當多功能自確認傳感器發生故障時,確認的測量值是被測量的最佳估計值,是重構的數據。
測量值的不確定度反映測量的準確度,由統計方法計算得到。
測量值的狀態反映當前多功能自確認傳感器的狀態,參照自確認傳感器可以分為:安全狀態、清晰狀態、模糊狀態、迷惑狀態和盲狀態五個級別;
原始數據是敏感單元測量值經信號調理單元后的輸出,具有重要的參考價值。
故障類型在發生故障時給出故障診斷單元的診斷結果,如果無故障,則輸出正常模式。
2 多功能自確認傳感器的特征
2.1 狀態自確認功能
傳統的多功能傳感器只能簡單的給出被測物理量的測量值,而對多功能傳感器自身的狀態未做任何評價,多功能自確認傳感器在監測多個物理量的同時,能夠通過對原始信號的進一步處理,給出測量值的狀態。通過測量值可以了解多功能自確認傳感器的工作狀態,進而實現對傳感器的健康監控。用戶可以根據傳感器的自身工作狀態及其變化趨勢,決定是否更換傳感器。一旦發生故障時,可以發出報警信號,并進行數據重構。
2.2 數據恢復功能
系統中的傳感器在發生故障時,輸出值立刻偏離正常值,錯誤的測量數據將會影響系統運行,甚至發生重大故障。多功能自確認傳感器在發出故障提示信號的同時,利用多個測量參數之間的相關性、冗余性以及歷史數據等,進行數據重構,對發生故障的輸出部分進行數據恢復,代替故障輸出,保證工業現場短時間內的物理量監測要求,同時為更換傳感器爭得寶貴的時間。數據恢復功能是多功能自確認傳感器的一個重要特點。
2.3 能夠給出測量值不確定度
傳感器在測量過程中會產生各種誤差,如敏感元件的非線性誤差、噪聲干擾誤差、信號處理誤差等。不確定度是在綜合這些誤差因素的基礎上,對測量準確度的一個表征。多功能自確認傳感器能夠在生成輸出數據單元中通過對測量信號的分析處理,計算出測量值的不確定度。用戶可以根據不確定度的大小及其變化趨勢,判斷傳感器的性能變化,及時更換準確度減低的傳感器,避免傳感器發生故障而影響系統運行。
2.4 充分利用多參數之間相關性
多功能自確認傳感器測量的是多個物理量,得到的是不同類型的多個參數,這些輸出參數之間通常存在一定的相關性。例如在特定環境中風速與溫度、溫度與濕度、溫度與氣體濃度之間具有一定的相關性。多功能傳感器可以利用這些不同類型參數之間的相關性來實現狀態自確認及數據恢復。
3 多功能自確認傳感器的關鍵技術
多功能自確認傳感器是傳感技術、信號處理、故障診斷、計量學等理論和技術相融合的產物。下面就其關鍵技術談談筆者的看法。
3.1 多功能自確認傳感器的狀態自確認及故障診斷算法
隨著傳感器的應用日益廣泛,對傳感器的可靠性要求越來越高,傳感器故障診斷問題日益受到人們的重視。自確認多功能傳感器具有狀態自確認及故障診斷功能,將給用戶使用帶來極大地方便。
故障診斷單元是多功能自確認傳感器的關鍵部分之一。如何采用有效的算法進行故障診斷,是設計和實現多功能自確認傳感器的重要問題。
傳感器故障診斷的研究學者們提出了很多方法,可以應用在多功能自確認傳感器故障中,目前國內外報道的主要算法有以下幾種[5-15]:①基于信號處理的方法,主要包括:基于小波變換的故障診斷方法、基于信息融合的故障診斷方法等;②基于解析模型的方法,主要包括:等價空間法、觀測器法、參數估計法等;③基于知識的故障診斷方法,主要包括:基于粗糙集知識約簡的故障診斷算法等;④基于機器學習的故障診斷方法,主要包括:基于神經網絡的故障診斷方法、基于主元分析的故障診斷方法、基于核主元分析的故障診斷方法、基于獨立成分分析的故障診斷方法、基于支持向量機的故障診斷方法等。
由于多功能自確認傳感器可以同時檢測多個物理量,檢測的信息中具有一定的相關和冗余關系,這樣就可能在故障診斷算法中充分利用這些特性,實現更有效的診斷。這是多功能自確認傳感器區別于其它類型傳感器的重要特點,也是今后有待深入研究的重要內容。
3.2 多功能自確認傳感器數據恢復方法
當多功能自確認傳感器發生故障時,可能導致其某一個參數輸出異常。這時可以充分利用其多參數之間的相關性,利用其它正常輸出的參數數據恢復輸出異常參數的數據,在短時間內代替故障輸出,作為該參數確認的測量值。目前還沒有針對多功能自確認傳感器的數據恢復方法,但故障傳感器的數據恢復一直以來備受國內外學者的關注,提出了一些數據恢復方法,可供借鑒。現有的傳感器數據恢復方法主要有:基于魯棒自聯想神經網絡的故障傳感器數據恢復方法,基于移動最小二乘的傳感器數據重構方法,基于小波包PCA的故障傳感器數據重構方法等[16-18]。
3.3 多功能自確認傳感器不確定度計算方法
多功能自確認傳感器測量值的不確定度既反映傳感器測量的準確度,同時又是傳感器可靠性的重要指標。正常測量值的不確定度采用統計計算方法。傳感器發生故障狀態下的測量值的不確定度計算一般采用在傳感器正常情況下不確定度的基礎上,針對具體的故障模式,根據經驗,增加一個加性不確定度來計算。這種計算方法具有很大的人為因素,因此多功能自確認傳感器測量值不確定度計算方法有待深入研究。
4 一個多功能自確認傳感器實驗模型
本文作者在初步研究的基礎上,利用甲烷、溫度和濕度敏感元件以及基于DSP28335的信號處理系統組成了多功能自確認傳感器實驗模型,其原理框圖如圖2所示。
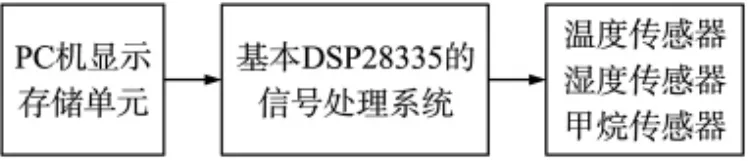
圖2 基于DSP28335多功能自確認傳感器原理框圖
該多功能自確認傳感器的敏感單元由溫度傳感器、濕度傳感器和甲烷傳感器組成,封裝在一個探頭內,實驗時將該探頭置于充滿空氣和甲烷的密閉容器中。三個敏感元件的分別輸出代表溫度、濕度和甲烷濃度的電壓信號,送入基于DSP28335的信號處理系統中進行濾波、放大、AD轉換,然后由DSP處理器進行信號處理和運算。
多功能自確認傳感器的故障診斷單元由DSP28335實現,本例中傳感器故障診斷算法采用了基于偏最小二乘(PLS)和支持向量機(SVM)算法。故障診斷后如無故障,多參數自確認傳感器按照功能模型描述的過程工作,確認測量值,輸出溫度、濕度和甲烷氣體濃度的測量值狀態和原始數據。測量值不確定度通過統計算法獲得。如果某個測量值出現異常,經診斷后確定是傳感器故障之后進行數據重構,并用重構的數據代替異常數據。由于出現故障,測量值的不確定度必然降低,多參數自確認傳感器及時報警。本系統中溫度和濕度敏感元件穩定性好,不易發生故障;甲烷傳感器容易發生故障,且常見是由于氣敏元件工作在高溫狀態,加熱絲斷裂,引起電路的開路、短路(加熱絲脫落在加熱電極)。本文以測量甲烷的敏感元件發生開路或短路故障、其他敏感元件正常為例,研究多參數自確認傳感器故障診斷和數據重構的過程。如果信號經由故障診斷單元故障診斷后有故障,則首先采用基于偏最小二乘法的回歸分析進行數據恢復,代替故障輸出,然后再進入生成輸出數據單元執行相關操作,輸出各種確認數據。由于篇幅所限,關于詳細的實驗結果另文介紹。
5 多功能自確認傳感器的發展方向
目前筆者尚未查到關于多功能自確認傳感器的文獻報道。這種傳感器具有廣泛的應用前景,它的發展與傳感技術、信號處理技術、MEMS等技術密切相關,現代科技的發展將為多功能自確認傳感器提供強有力的支持。但現階段處于理論方法研究和實驗室試驗階段。近期據需解決的問題有:
(1)多功能自確認傳感器的算法研究
針對多功能自確認傳感器的特點,研究故障診斷算法、數據恢復方法以及不確定度計算方法,要充分利用其多個參數之間的相關性。研究適用于不同多功能自確認傳感器的信號處理方法以及更有效的通用的算法。與傳統的多功能傳感器和普通自確認傳感器相比,多功能自確認傳感器的輸出信息更加豐富,這些信息的獲得都是建立在大量的信號分析與計算的基礎之上的,所以多功能自確認傳感器必須具有運算能力更加強大的信號分析處理單元以及相應的分析算法。
(2)關于傳感器故障診斷的研究
傳感器故障診斷不同于系統故障診斷。當傳感器輸出數據異常時,必須分清這是被測對象的實際輸出還是傳感器故障產生的錯誤數據。有些場合很難區分。多參數之間的相關性可作為診斷的依據,但如何準確地診斷傳感器故障,還有待深入研究。
(3)多功能自確認傳感器需要集成化。
為適應各種工業場合的應用,多功能自確認傳感器需要減小體積,向集成化方向發展。傳感技術的發展,使多個敏感元件集成在一個微小芯片上成為可能,例如文[19]研制了一種集成式多功能硅微傳感器。進一步將信號調理電路和信號處理電路集成在一個芯片上。隨著芯片設計技術與加工技術的進步,將來一定能將敏感元件、信號處理單元集成在一起制成集成化的多功能自確認傳感器。
6 結論
本文提出的多功能自確認傳感器的研究剛剛開始。自確認的功能可認為是一種智能行為,主要靠算法和軟件實現。但目前研究的智能傳感器尚未具有自確認傳感器給的全部功能。雖然現階段種種問題尚未解決,相信隨著研究的深入和技術的進步,這種新型傳感器——多功能自確認傳感器一定會迅速發展并得到廣泛應用。
[1]Torsi,Dodabalapur.Multi-Parameter Gas Sensors Based on Organic Thin-Film-Transistors[J].Sensors and Actuators,2000,1(4):312-316.
[2]M P Henry,D W Clark.The Self Validating Sensor:Rationale,Definitions and Examples[J].Control Engineering Practice,1993,1(4):585-610.
[3]Liu R P,Fuent M J,Henry M P,duta M D.A Neural Network to Correct Mass Flow Errors Caused by Two-Phase Flow in a Digital Coriolis Mass Flowmeter[J].Flow Measurement and Instrumentation.2001,12:53 -63.
[4]馮志剛,王祁,信太克規.自確認壓力傳感器結構設計.傳感技術學報.2006,19(3):662 -666.
[5]Barberree D.Dynamically Self-Validating Contact Temperature Sensors[C]//AIP Conference.Proceedings no.684,2003 pt.2:1097-1102.
[6]呂伯權,李天鐸.一種基于小波網絡的故障檢測方法[J].電工技術學報.1997,12(4):34 -36.
[7]石志勇,李國章,付建平,黃允華.基于平均空間的故障檢測與診斷[J].信息與控制.1999,28(6):459 -465.
[8]Philippe kerliizin,Philippe Refregier.Theoretical Investigation of the Robustness of Multiplayer Perceptrons:Analysis of the Linear Case and Extension to Nonlinear Networks[J].IEEE Trans.On neural networks.1995,6(3):560 -571.
[9]A.Bernieri,Giovanni Betaa,Consolatina Iaguori.On-Line Fault Detection and Diagnosis Obtained by Implementing Neural Algorithms on a Digital Signal Processor[J].IEEE Trans.Instrum.Meas.1996,45(5):894 -899.
[10]A.L.Dexter.Fuzzy Model Based Fault Diagnosis[J].IEEE Proc.Control Theory Application.1995.142(6):20 -49.
[11]張昱君,劉愛倫.基于改進主元分析方法的化工生產過程的故障檢測.工業控制計算機.2006,19(1):2 -5.
[12]Sheng-Fa Yuan,Fu-Lei Chu.Support Vector Machines-Based Fault Diagnosis for Turbo-Pump Rotor[J].Mechanical Systems and Signal Processing,2006,20:939 -952.
[13]Yong Chang,Yihuai Hu.Fault Diagnosis of Marine Diesel Engine Based on Blind Source Separation[C].The 2nd International Conference on Computer and Automation Engineering(ICCAE 2010),Singapore,February 26 -28,2010.
[14]Yang S J,Stotz A.High Level Information Fusion for Tracking and Projection of Multistage Cyber Attacks[J].In Formation Fusion,2009,10(1):107 -121.
[15]Aran O,Burger T,Caplier A.A Belief-Based Sequential Fusion Approach for Fusing Manual Signals and Non-Manual Signals[J].PatternRecognition,2009,42(5):812 -822.
[16]鈕永勝,趙新民.采用魯棒自聯想神經網絡高質量地恢復故障傳感器信號方法研究.傳感技術學報.1997,2:(1-5).
[17]劉丹,孫金瑋.移動最小二乘法在多功能傳感器數據重構中的應用.自動化學報.2007,33(8):824 -828.
[18]徐濤,王祁.基于MSPCA的傳感器故障診斷與數據重構.計算機工程與應用.2008,44(11):168 -169.
[19]周建發,趙玉龍等.一種集成式多參數硅微傳感器.傳感技術學報,2006,19(2):273 -276.
猜你喜歡
汽車維修與保養(2019年7期)2020-01-06 03:30:42
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
汽車維護與修理(2016年10期)2016-07-10 08:17:41
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
重慶工商大學學報(自然科學版)(2015年10期)2015-12-28 07:43:58
汽車維修與保養(2015年6期)2015-04-17 03:31:50
汽車維護與修理(2015年2期)2015-02-28 12:15:39
振動、測試與診斷(2014年5期)2014-03-01 01:14:21
