六轉子微型飛行器及其低雷諾數下的旋翼氣動性能仿真
2011-04-09 05:34:34高慶嘉
空氣動力學學報 2011年3期
關鍵詞:分析
白 越,曹 萍,高慶嘉,孫 強
(1.中國科學院長春光學精密機械與物理研究所,吉林 長春 130033;2.長春工程學院理學院,吉林 長春 130022)
0 引言
隨著MEMS、微電子、新型能源及計算機等技術的發展,微型飛行器的性能日益提高,已經具有了實用性[1-2]。微型飛行器具有體積小、重量輕、成本低的飛行平臺優勢,且其操縱方便、機動靈活、噪音小、隱蔽性好,因此無論是在軍事領域還是在民用領域,都具有十分廣闊的應用前景[3-4]。在軍用領域,微型飛行器可用于敵情偵察、目標追蹤、電子干擾、損傷評估、核生化取樣、部署傳感器、中繼通訊、甚至主動進攻和防御。帶有目標定位、信息傳遞以及攻擊性武器的多種MAV可以集群發動“火蟻”戰爭。在民用領域,微型飛行器可用于環境研究、人道主義排雷、自然災害的監視和救援等。
以產生升力的方式來分類,當前研究的微型飛行器總體上可分為三類:固定翼式微型飛行器、旋翼式微型飛行器和撲翼式微型飛行器。固定翼式微型飛行器升力由與傳統飛行器一樣的固定機翼產生,結構簡單,但機動性不高。旋翼式微型飛行器升力由旋翼產生,其最大特點是可垂直起降和懸停,機動性比固定翼式好。撲翼式MAV是一類模仿鳥類和昆蟲飛行的一類飛行器。其主要特點是將舉升、懸停和推進功能集于一身,但其設計及氣動性已經超出了傳統的概念,遠未達到實用化要求[5-9]。
當前世界的軍事沖突大部分都是局部范圍小規模的軍事沖突,戰斗場合多發生在城市背景下,特別是愈演愈烈的反恐戰爭,城市背景下對敵人的偵察、監視及位置確定等要求越來越重要。使用微型無人飛行器對于實現上述任務具有得天獨厚的優勢,甚至可以投擲炸彈等完成對敵人的清除。當前研究的三種微型飛行器的絕大部分共同存在的一個不足就是機動性不夠,在執行任務的過程中無法很好的隱蔽自己的行蹤,這樣被敵方發現的可能性將成倍增加。
基于當前微型飛行器應用于反恐等城市作戰需要的不足,本文提出了一種具有高度機動性的六轉子微型飛行器的概念,該飛行器能實現快速前飛,懸停,前飛中任意方向滾轉和偏航,當具有合適的外殼時甚至可以沿著地面或建筑物的垂直外壁滾動前進。根據任務的需要可以攜帶不同的載荷完成對敵偵察、監視及清除,或者對地震等自然災害造成的封閉建筑內的被困人員情況進行偵察、輸運給養等。本文將詳細分析其空間配置結構與飛行器性能的關系以及旋翼在低雷諾數下的氣動特性,確定該微型飛行器的最優結構,得到旋翼在低雷諾數下的氣動力參數,為飛行控制系統的設計提供精確的動力學參數。
1 六轉子微型飛行器的結構、配置及初步的動力學分析
六轉子微型飛行器由居于正六邊形的六個頂點的六個轉子構成,包括其支撐結構及用于安放載荷的中心平臺,如下圖1所示,根據轉子空間安裝角度及位置的不同,飛行器有三種結構(如圖1(a)、圖1(b)和圖1(c)所示),其自由體受力如圖2所示,圖2(a)、圖2(b)和圖2(c)分別對應圖1(a)、圖1(b)和圖1(c)三種結構的受力狀態。圖 2 中 f1、f2、f3、f4、f5和 f6分別是六個轉子旋轉產生的升力。θ對應于旋轉平面同機體平面間夾角,φ對應旋轉平面在平臺平面上的投影形成的橢圓短軸與一對轉子連線的夾角。D表示阻力的合力,mg表示重力。α、β和γ分別表示阻力D與x軸、y軸及z軸的夾角。J表示飛行器的轉動慣量,ω表示飛行器自身的旋轉速度。
因此,圖1(a)所示結構的飛行器運動方程為:

圖1b所示結構的飛行器運動方程為:

圖1c所示結構的飛行器運動方程為:
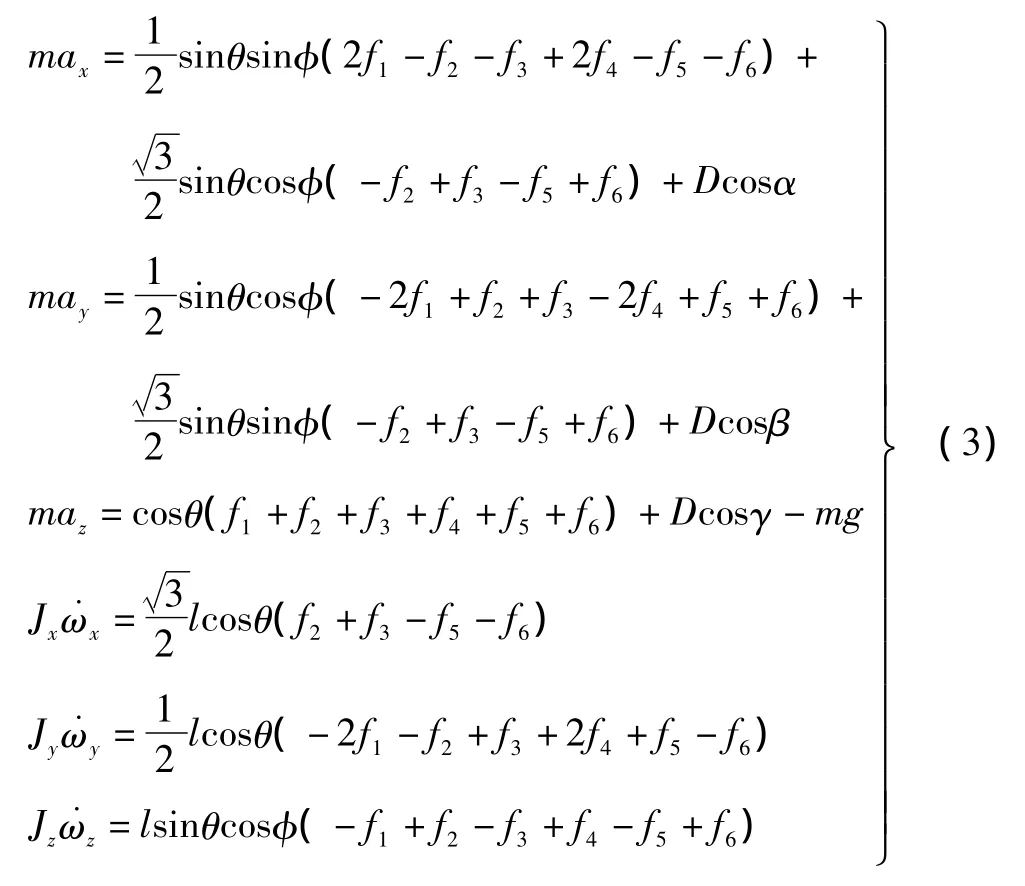

圖1 六轉子微型飛行器的配置結構Fig.1 The configuration of multi rotor flight vehicle

圖2 六轉子微型飛行器自由體受力圖Fig.2 The free-body diagram of the vehicle in flight
分析運動方程組(1),該配置結構的微型飛行器可以產生任意方向的力及力矩;而運動方程組(2)顯示了該結構的飛行器不能提供繞z軸的扭轉力矩,即該結構的飛行器不用提供繞z軸的偏航操作,因此該結構配置有缺陷;分析運動方程組(3)可知,角度φ的出現減小了繞z軸的扭矩,同時也減小了沿x軸和y軸的力。綜合以上分析,如圖1(a)所示配置結構的微型飛行器具有最優的性能。
對于如圖1(a)所示配置結構,相鄰兩個旋翼所產生升力的夾角ψ為:

當θ取54.7時,ψ等于90,此時旋翼產生的升力相互垂直,即三對旋翼產生的升力在空間正交,可分別對單軸進行控制不影響另兩軸,無耦合,簡化了控制。
2 旋翼低雷諾數下的氣動性能分析
對微型飛行器來說,低速、小尺度和低雷諾數(Re)是其主要技術特征。MAVs決不是常規飛行器的簡單縮小,在低雷諾數空氣動力學設計上將面臨巨大挑戰。
飛行器旋翼采用最常用的低雷諾數翼型Eppler 387,根據其弦長及速度范圍可以確定Re數的范圍為1×104到12.8×104。Eppler 387在雷諾數Re小于6×104以下還未有人研究過,而大于Re小于6×104已經有現成的研究結果可以引用[10],因此重點研究Eppler 387在雷諾數Re小于6×104時的氣動性能。
應用流體動力分析軟件Fluent 6.1作為分析工具,采用正投影混合網格方法對其在低雷諾數下的氣動性能進行研究,建立的分析模型有限元網格模型如圖3所示。有限元分析結果的精度同網格尺寸具有直接關系,網格精度不夠導致分析結果有誤差,而過密的網格又造成了大量計算時間的浪費甚至無法得到分析結果,因此需要確定合理的網格密度。圖4顯示了在四種網格密度下升力系數隨轉子槳片攻角的變化曲線。四種網格密度分別為:(1)327個四邊形內部網格和1809個三角形外部網格;(2)1280個四邊形內部網格和6780個三角形外部網格;(3)5426個四邊形內部網格和27534個三角形外部網格;(4)21975個四邊形內部網格和91549個三角形外部網格。從圖4可以看出,第一種網格密度不足,導致分析結果的精度較差,第二種網格密度分析結果相對第一種有了一定的改善,第三種密度網格分析結果同第四種密度網格的分析結果具有基本一致的精度,但第四種網格密度遠大于第三種網格密度,需要的計算機機時更多,綜合考慮,第三種密度的網格可以提供足夠的分析精度,本文的后續分析中所使用的網格密度都采用條件(3)所對應的網格密度。
圖5~圖7分別給出了升力系數在雷諾數分別為Re=1×104、2×104、3 ×104、6 ×104下隨槳片攻角的變化曲線、阻力系數在雷諾數分別為 Re=1×104、2×104、3×104、6×104下隨槳片攻角的變化曲線、升阻比在雷諾數為 Re=1×104、2×104、3×104、6×104下的變化曲線。分析圖5~圖7,隨著雷諾數的降低,升力系數減小而阻力系數增加,升阻比減小,因此隨著雷諾數的減小飛行器的負載能力降低。當槳片的攻角大于8°時,因氣流分離造成的升阻比隨攻角的增大反而減小,對于本項研究的微型飛行器,攻角選在8°是合理的選擇。圖8給出了升力系數在雷諾數 Re=6×104下仿真結果與文獻[10]中試驗結果的比較,從圖中可以看出,攻角從0°~6°,仿真結果同試驗結果具有較好的一致性;當攻角大于6°時,仿真結果比試驗結果約小6%但趨勢一致,其原因是在這一攻角范圍氣流分離產生的前緣渦在實驗中僅出現在外側,內側仍為附著流動。

圖3 分析模型的網格圖Fig.3 Conformal hybrid mesh system for airfoil Eppler 387
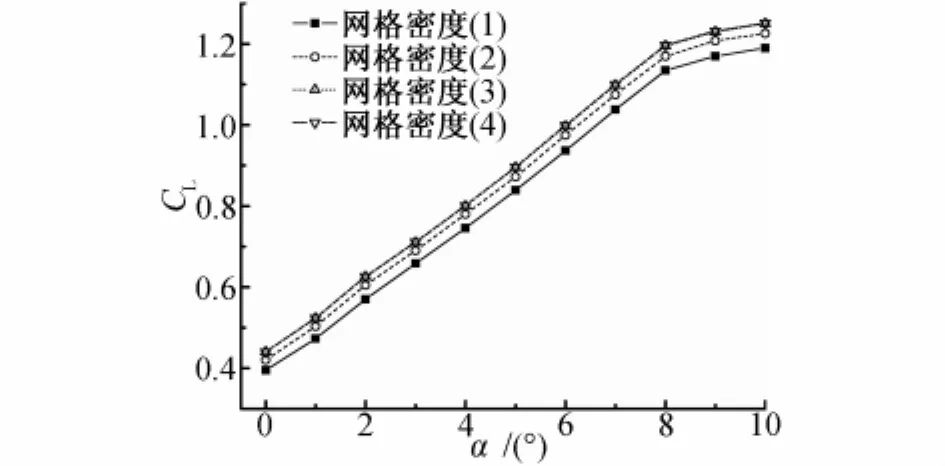
圖4 不同網格密度的升力系數曲線Fig.4 The lift coefficients C L under Re=1×105 with four grid density distributions

圖5 升力系數分別在雷諾數 Re=1×104,2×104,3×104和6×104下隨槳片攻角的變化曲線Fig.5 Lift coefficient comparison of Reynoldsnumber Re=1×104,2×104,3×104 and 6×104

圖6 阻力系數分別在雷諾數 Re=1×104,2×104,3×104和6×104下隨槳片攻角的變化曲線Fig.6 Drag coefficient comparison of Reynoldsnumber Re=1×104,2×104,3×104 and 6×104

圖7 升阻比在雷諾數為 Re=1×104,2×104,3×104和6×104下的變化曲線Fig.7 The ratio of lift coefficient to drag coefficient und-Reynolds number Re=1×104,2×104,3×104 and 6×104
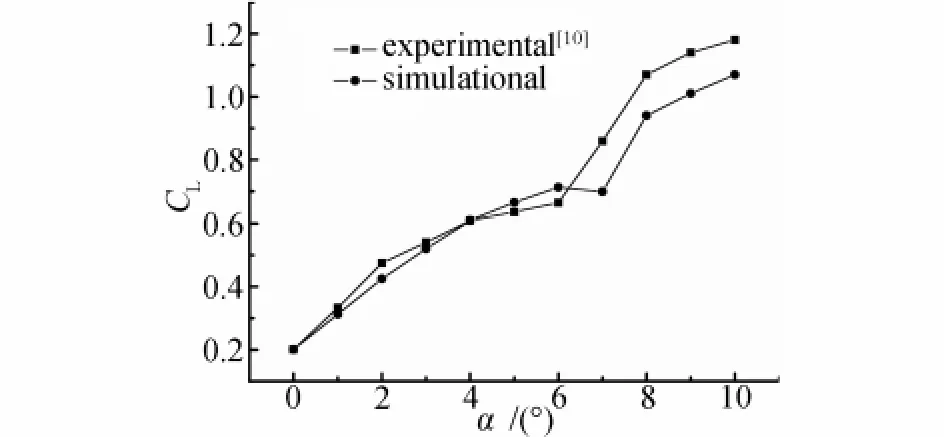
圖8 升力系數在雷諾數Re=6×104下仿真結果與實驗結果的比較Fig.8 The comparison of lift coefficient between simulation and experiment under Re=6×104
3 試驗
制作了如圖1(a)配置結構的六轉子微型飛行器樣機,該飛行器的重量為3.12kg,旋翼翼型類型為Eppler 387,旋翼攻角為8°,安裝角θ為54.7°。樣機當前實現了垂直起飛和慢速前飛,下一步將進一步完善控制系統,提高飛行器的飛行品質。根據起飛時旋翼所對應的轉速計算出實際的升力系數比仿真分析結果小5.26%,這一結果同參考文獻[10]中試驗結果相吻合。飛行試驗證明本文所提出的飛行器原理可行,同時也證明了本文對翼型Eppler 387低雷諾數下的仿真結果是正確的。
4 結論
(1)合理配置六轉子在空間位置,本文所提出的六轉子無人飛行器可以在空中向任意方向飛行,提供合適外殼時甚至可以在地面上滾動前進。當θ取54.7°時,旋翼產生的升力相互垂直,即三對旋翼產生的升力在空間正交,無耦合。
(2)分析了Eppler 387在雷諾數小于6×104下的氣動性能,隨著雷諾數的降低,升力系數減小而阻力系數增加,升阻比減小,因此隨著雷諾數的減小飛行器的負載能力降低。
(3)當槳片的攻角大于8°時,因氣流分離的影響,Eppler387的升阻比隨攻角的增大反而減小,對于本項研究的微型飛行器,攻角取8°是合理的選擇。
(4)制作了六轉子微型飛行器樣機,實現了垂直起飛及慢速前飛,證明了該結構飛行器原理可行,同時也證明了本文對翼型Eppler 387低雷諾數下的仿真結果的正確性。
[1]周新春,昂海松.微型飛行器研究進展與關鍵技術[J].傳感器與微系統,2008,27(6):1-4.
[2]MUELLER T J.Overview of micro-air-vehicle development[M]//Introduction to the Design of Fixed-Wing Micro Air Vehicles, AIAA-Education Series, AIAA Reston VA,2006:1-38.
[3]KELLOGG J C,Case study:micro tactical expendable rigidwing micro air vehicle[M]//Introduction to the Design of Fixed-Wing Micro Air Vehicles,AIAA-Education Series,AIAA Reston VA,2006:151-184.
[4]FEARING R S.Toward micromechanical flyers[J].The Bridge,2001,31(4):4-8.
[5]蘇進展,方宗德,劉嵐.微撲翼飛行器總體設計及實驗[J].光學精密工程,2008,16(4):656-661.
[6]宋書恒,朱國林,張樹海.微型飛行器低雷諾數矩形撲翼非定常氣動特性的數值模擬[J].空氣動力學學報,2008,26(2):239-245.
[7]RAMAMURTI R,SANDBERG W.Computation of aerody-namic characteristics of a micro air vehicle[M]//Progress in Astronautics Aeronautics.AIAA Reston VA,2001:537-555.
[8]BOHORQUEZ F,SAMUEL P,SIROHI J,RUDD L,PINES D,PEREL R.Design,analysis and performance of a rotary wing MAV[J].Journal of the American Helicopter Society,2003,48(2):80-90.
[9]BOHORQUEZ F,PINES D.Rotor design for efficient rotary wing micro air vehicles[M]//Proceedings of the AHS International Specialists'Meeting-Unmanned Rotorcraft:Design,Control and Testing.Chandler,AZ,2005.
[10]KELLY J C.Computational analysis of a prototype martian rotorcraft experiment[A].20th AIAA Applied Aerodynamics Conference[C].St.Louis,Missouri.,USA,2002:1-10.
猜你喜歡
現代畜牧科技(2021年9期)2021-10-13 06:39:14
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
電子制作(2018年18期)2018-11-14 01:48:24
山東工業技術(2016年15期)2016-12-01 05:31:22
當代經濟研究(2016年5期)2016-12-01 03:12:05
現代農業(2016年5期)2016-02-28 18:42:46
出版與印刷(2016年3期)2016-02-02 01:20:11
財經界(學術版)(2015年20期)2015-12-23 09:20:13
中國中醫藥現代遠程教育(2014年11期)2014-08-08 13:23:44
華北水利水電大學學報(社會科學版)(2014年3期)2014-04-16 04:38:31
