六自由度主被動一體隔振平臺的動力學實驗建模
2011-02-12 11:38:44郝慧榮白鴻柏張慧杰李冬偉劉樹峰
振動與沖擊 2011年11期
郝慧榮,白鴻柏,張慧杰,李冬偉,劉樹峰
(1.軍械工程學院,石家莊 050003;2.內蒙古工業大學,呼和浩特 010051)
精密的電子、光學設備為避免來自空間的沖擊與振動的影響與損壞,通常需要采用隔振平臺來進行防護,六自由度隔振就是在這樣的背景下產生的一種防護技術;主被動一體隔振平臺是在傳統的被動隔振基礎上添加主動控制力,其可以克服傳統被動隔振在低于固有頻率時無法隔振的弱點[1~5]。
要實現六自由度平臺的主被動一體隔振就必須建立起其動力學模型,這是實現隔振的主動控制的前提,也是能否達到滿意控制效果的關鍵。
實驗建模又叫做實驗模態參數辨識,是系統辨識的一個方面。模態參數辨識的方法很多,有時域辨識方法,也有頻域辨識方法。這里采用的是時域辨識,即對結構上某一點激勵,同時測得激勵點與響應點的時域信號,根據多自由度振動的理論知識,利用最小二乘遞推算法辨識出模態參數[6-7]。
文獻[8]雖然曾對主被動一體隔振平臺進行過實驗建模,但其存在以下幾點不足:① 利用錘擊脈沖激勵信噪差,得到頻響函數準確性不高;② 所辨識的模型只是基于平臺本身考慮而不包含作動器,因此,得到的模型只是整個控制系統的子系統,還得單獨建立作動器的動力學模型。文獻[9]實驗建模采用平臺自身作動器快速正弦掃描激勵雖然提高了信噪比,但其因作動器分組而帶入一些計算增加了模型的不確定性。
1 六自由度主被動一體隔振平臺測試系統
六自由度主被動一體隔振平臺如圖1所示,其由4個空氣彈簧被動支撐,每個空氣彈簧可等效為具有三向剛度、阻尼的六自由度鉸[10];6個傳感器監測隔振平臺的振動情況,將信號反饋給控制器;8個作動器將根據控制器的指令為平臺提供主動控制力,且作動器的安裝不影響平臺的六個自由度。圖1中6個傳感器中的1、3、5 為垂直傳感器,方向同z正向;2、4、6 為水平傳感器,2的方向同x正向,4的方向同y正向,6的方向同y反向;8個作動器中的1、2、3、4水平放置,5、6、7、8垂直放置。1方向同y正向;2方向同x反向;3方向同y反向;4方向同x正向;5、6、7、8方向同z正向。
要對平臺進行主動控制,前提條件是需要知道控制對象的動力學模型,整個主被動隔振系統的模型結構辨識如框圖2(a)所示,這里需要說明的是:在進行隔振主動控制時沒有圖2(a)中的虛線,而在實驗建模系統辨識時需用到虛線連接,主動控制時工控機作為控制器向作動器發出控制信號,而在系統辨識時工控機作為信號發生器向作動器發出激勵信號;作為對比,圖2(b)給出了文獻[8]中提到的辨識方法框圖,從中可以發現:圖2(b)所辨識結果是圖2(a)的一部分只是平臺本身。

2 慣性參考坐標到傳感器坐標的變換
在考慮空間六自由度隔振問題時就會涉及到轉動,而轉動會帶來方向余弦矩陣R,即旋轉運動時的坐標變換,一般采用多剛體的旋轉坐標法,最普遍采用歐拉角坐標,記 α、β、γ 為歐拉角,則:

式中c表示cos(·),s表示sin(·)。當平臺只發生微小轉動時,有 cos(·)≈1,sin(·)≈(·),sin(·)sin(·)≈0坐標系的旋轉矩陣R可以簡化為:

式(2)的簡化使得六自由度動力學方程變為了線性方程,這時可認為歐拉角就是繞各慣性坐標軸的轉角。在物理空間,選取坐標原點建立坐標系后(參見圖1),隔振平臺上任意點b與隔振平臺質心o的位移的關系可表示為:
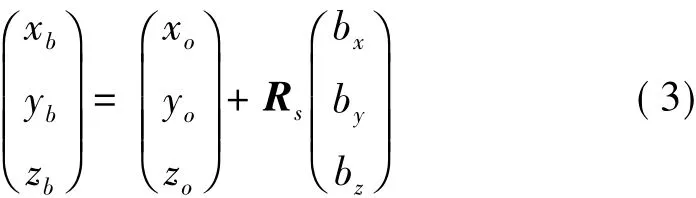
其中xb、yb、zb為b點的三個方向上的坐標;xo、yo、zo為平臺質心o的慣性位移坐標;bx、by、bz為b點在平臺質心為坐標原點的“固連坐標系”下的坐標。由式(3)有下面的式子成立:
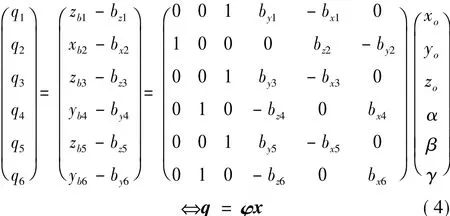
其中q=(q1q2…q6)T為6個傳感器監測的信號;zb1、xb2…yb6為6個傳感器在慣性坐標下沿著其測試方向的位移;x=(xo,yo,zo,α,β,γ)T為六自由度的物理坐標;bx1、bx2…bx6,by1、by2…by6,bz1、bz2…bz6為 6 個傳感器在平臺“固連坐標系”下的坐標。φ是傳感器的布置矩陣,若det(φ)≠0則有下式成立:

由式(4)可知,若能完整監測六個自由的運動情況,傳感器布置必須滿足det(φ)≠0的條件。
在物理坐標下六自由度的動力學方程為:

其中M1、C1和K1分別為在慣性參考坐標系下的質量、阻尼和剛度矩陣;F=(fx,fy,fz,Mx,My,Mz)T是物理坐標下沿著三個方向的力與繞三個方向的力矩。在滿足det(φ)≠0的情況下,式(6)可變為:

或寫為:

其中:M2=φM1φ-1、C2= φC1φ-1和 K2= φK1φ-1分別為在傳感器坐標系下的質量、阻尼和剛度矩陣。
設dx1…、dy1…、dz1…為8個電磁作動器在平臺“固連坐標系”下的坐標,則有下面的式子成立:
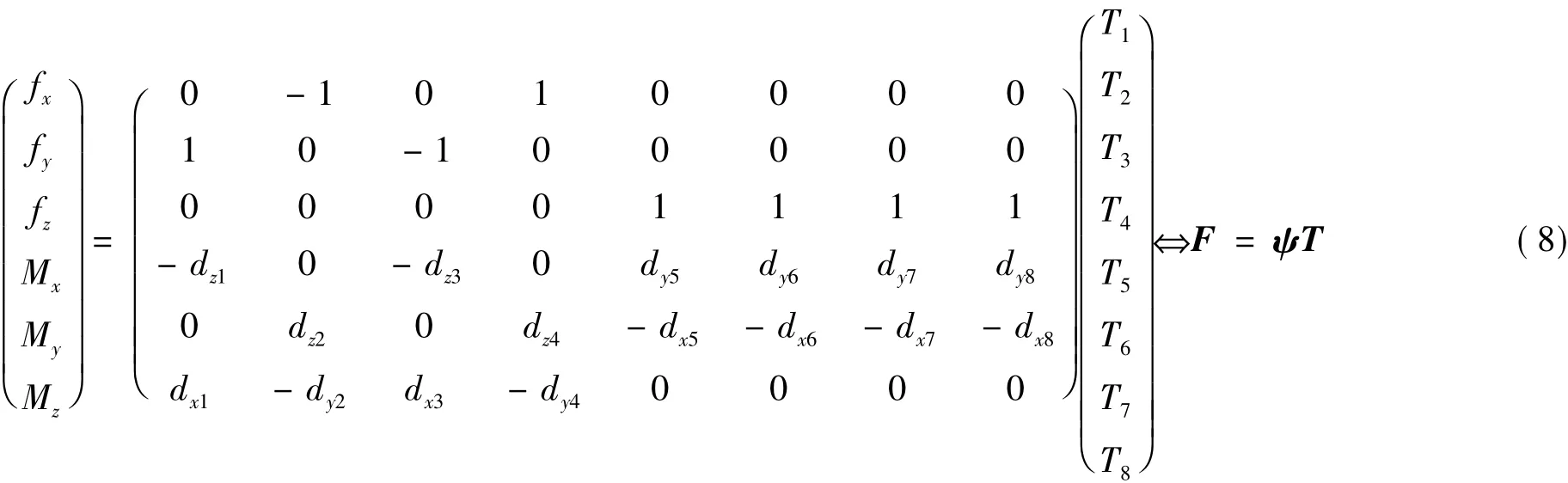
其中T=(T1T2…T8)T是作動器的輸入激勵力,ψ是作動器的布置矩陣。
若傳感器與作動器都是線性的則有:

其中Λq、ΛT是6個傳感器與8個作動器的物理量與電壓向量Uq、UT的標定系數矩陣,將式(8),式(9)帶入式(7)得:

或寫為:

其中:

由det(φ)≠0可推出det(M2)≠0,式(10b)可化為:

其中,C4=M-13C3,K4=M-13K3,Φ2=M-13Φ1,質量陣化為了單位矩陣。
化為式(11)的好處是可以不必再關心傳感器布置矩陣φ與作動器布置矩陣ψ的具體數值,也不必再關心它們的標定系數矩陣Λq、ΛT的具體數值,直接建立起輸入與輸出之間的動力學模型,可以最大限度的減少模型的不確定性,實現整體建模。再有化為(11)式為參數估計提供了一個簡潔的模型。
3 最小二乘估計遞推算法
通過觀察式(11)可以發現:式(11)的每一行有20個待辨識的參數,整個方程組總共有120個參數。在實際的辨識實驗中,可以直接通過觀測得到電壓向量Uq、UT,而將Uq信號數值微分一次、兩次就可以知道、。不能直接使用式(11)進行參數辨識,需將其化為參數估計模型。將式(11)的第i行(i=1,2…6)展開變化為:


Yi(j)是j×1的觀測矢量,H(j)是j×20的觀測矩陣。在最小二乘準則下:

記 P(j)=[H(j)T·H(j)]-1為信息矩陣,增加一次新的觀測:

由矩陣反演公式[7]知:

其中K(j)為增益矩陣:

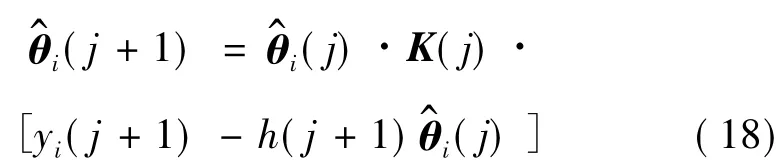
進一步推得待估參數矢量的遞推公式為:
4 辨識結果
參數進行辨識實驗的具體做法是:利用主被動一體隔振平臺的8個電磁作動器分別對平臺進行力掃頻激勵,通過6個傳感器測得平臺的位移響應信號,將激勵與響應信號都記錄下來后,帶入辨識的狀態方程進行參數辨識(或叫做參數估計)。
平臺實驗建模的測試設備為:傳感器采用的是中國地震局制造的941B型低頻測振儀;A/D轉換采用的是PCI-1713多通道12位采集卡;D/A轉換采用的PCI-1723多通道16位輸出卡;作為平臺振動激勵的作動器與功放采用的是課題組開發研制的音圈電機以及其功放,整個系統實物如圖3所示。快速正弦掃描在整個測試頻段內能獲得平譜,且激勵能量相同,信噪比大,精度高,因此這里激勵信號選用快速正弦掃描。
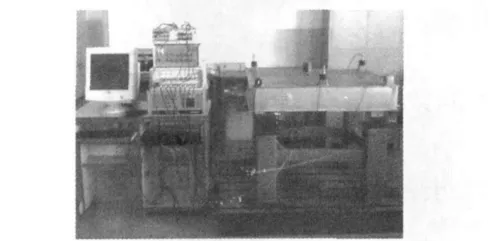
圖3 六自由度主被動一體隔振平臺實物圖Fig.3 6-DOF active-passive vibration isolation platform
當用振動控制儀給每個作動器分別施加頻率3 Hz~30 Hz,振幅1 V如圖4所示的掃頻激勵信號時,六個傳感器實測到的位移電壓信號如圖5所示。通過前文實驗建模中的辨識方法,可得到六自由度隔振平臺的標稱參數矩陣為:
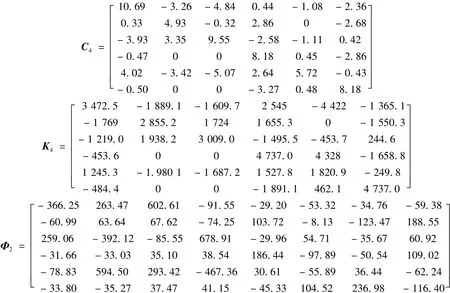

圖4 八個作動器掃頻激勵信號Fig.4 The frequency sweep signal of the eight actuators
圖6給出了應用最小二乘遞推算法,當i=1時的誤差曲線,可見參數的估計值是趨于穩定的,當i=2,3…6時有類似的誤差曲線。
知道了C4、K4和Φ2后就可以方便的寫出未加控制時的系統狀態方程:

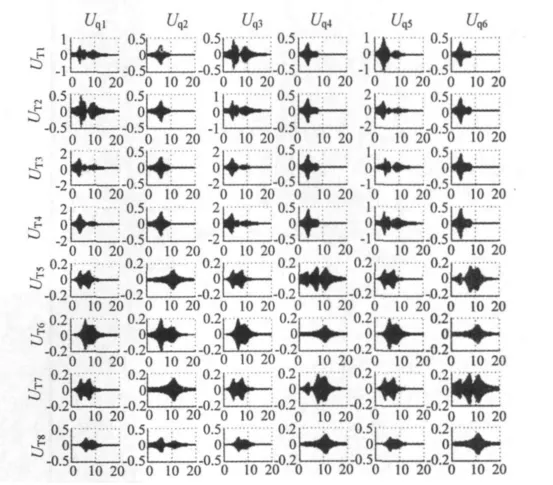
圖5 八個作動器分別掃頻激勵六個傳感器測的位移信號Fig.5 Displacement signals of the six sensors under the eight actuators separately frequency sweep actuation
式(19)中系統狀態方程階次是12階,有了未加控制時的系統狀態方程,就可以進行下一步的振動主動控制器的設計了,這里不再贅述。
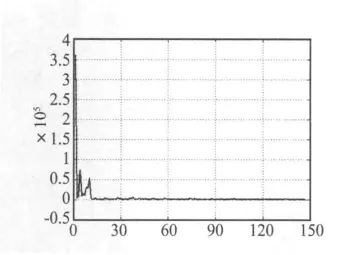
圖6 誤差曲線Fig.6 The curve of error
5 結論
本文與文獻[8,9]的模型辨識最大的不同是在時域進行而非頻域,在頻域辨識每次只能使用一個傳感器的信息,信息掌握不全面,而且每個單獨辨識容易造成虛假(噪聲)模態的產生,最終整個系統的階次會很高,使用時域的方法六個傳感器的信息都被使用,最終的系統狀態方程階次只有12階。另外,通過模型參數的辨識發現如下幾點結論:
(1)利用作動器作為激勵源信噪比高,可以直接辨識出整個系統的模型,比分模塊辨識減少了工作量;
(2)空間物理坐標到傳感器坐標的變換,既使得不必再關心傳感器與作動器的位置矩陣具體的數值,也不必再關心它們的標定系數矩陣的具體數值,可以方便的建立起輸入與輸出之間的動力學模型;
(3)若要能完整監測六個自由的運動情況,傳感器布置矩陣φ必須滿足det(φ)≠0的條件;
(4)最小二乘估計遞推算法較普通最小二乘估計和迭代最小二乘估計工作量最小。
利用實驗建模給出的狀態方程為下一步的隔振平臺的振動主動控制打下了基礎。
[1]羅煜峰.基于Matlab的六自由度隔振系統計算[J].機械與電子,2007,(8):73 -75.
[2]陳修祥,馬履中.車載設備多維振動控制裝置的設計及模態研究[J].自然科學進展,2007,17(4):551 -555.
[3]朱 偉,馬履中,等.基于三平移并聯機構的三維減振平臺建模與仿真[J].農業機械學報,2008,39(1):142 -146.
[4] Nakamura Y,et al.Development of active 6-DOF micro vibration control system using giant magnet astrictive actuator.Proceedings of the SPIE Conference on Smart Systems for Bridges Structures and Highways[C].SPIE-International Society for Optical Engineering,1999,229-240.
[5]Thomson W T,Dahleh M D.Theory of vibration with applications(Fifth Edition)[M].影印本.北京:清華大學出版社,2005.
[6]傅志方,華宏星.模態分析理論與應用[M].上海:上海交通大學出版社,2000.
[7]劉 君,夏智勛,編著.動力學系統辨識與建模[M].長沙:國防科技大學大學出版社,2007.
[8]張春良.微制造平臺振動主動控制研究[D].杭州:浙江大學,2003.
[9]侯軍芳.六自由度微動精密平臺主動隔振技術研究[D].石家莊:軍械工程學院,2009.
[10] C.M.哈里斯,C.E.克瑞德,主編.眾師,譯.沖擊和振動手冊[M].北京:科學出版社,1990.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
科學大眾(2023年17期)2023-10-26 07:39:14
鴨綠江(2021年35期)2021-04-19 12:24:18
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
天天愛科學(2020年6期)2020-09-10 07:22:44
數學物理學報(2020年2期)2020-06-02 11:29:24
電子制作(2018年11期)2018-08-04 03:25:42
數學物理學報(2017年6期)2018-01-22 02:26:40
光學精密工程(2016年6期)2016-11-07 09:07:19
