一例永磁同步電動(dòng)機(jī)的轉(zhuǎn)子位置檢測(cè)故障分析
2010-09-29 12:17:32梁毅孫繼
制造技術(shù)與機(jī)床 2010年2期
關(guān)鍵詞:故障
梁毅孫繼
(中國(guó)工程物理研究院機(jī)械制造工藝研究所,四川綿陽(yáng) 621900)
永磁同步電動(dòng)機(jī),因其效率高、體積小、調(diào)速性能良好得到廣泛應(yīng)用。在伺服系統(tǒng)等高精度控制的場(chǎng)合一般需要安裝光電編碼器、旋轉(zhuǎn)變壓器等位置傳感器來(lái)獲得電動(dòng)機(jī)轉(zhuǎn)子的準(zhǔn)確位置。由于安裝的誤差會(huì)使位置傳感器的零位產(chǎn)生偏差,位置傳感器的零位偏差將造成轉(zhuǎn)子位置檢測(cè)的零位偏差,而電動(dòng)機(jī)轉(zhuǎn)子檢測(cè)零位偏差的存在引起逆變器開(kāi)關(guān)管邏輯換向錯(cuò)誤,將引起不期望和不可控制的軸電流,嚴(yán)重時(shí)會(huì)造成電動(dòng)機(jī)無(wú)法啟動(dòng)或轉(zhuǎn)動(dòng)。轉(zhuǎn)子位置零位偏差即位置傳感器的零位偏差,它是指位置傳感器相對(duì)于轉(zhuǎn)子實(shí)際位置的偏差。下面分析一例由于編碼器的安裝誤差引起的電動(dòng)機(jī)非正常工作。
1 故障現(xiàn)象
一臺(tái)配套SIEMENS 802D系統(tǒng)、611Ue伺服驅(qū)動(dòng)的數(shù)控銑床,Z軸移動(dòng)0.62 mm時(shí)出現(xiàn)ALM380500報(bào)警,611Ue伺服驅(qū)動(dòng)出現(xiàn)E-608#報(bào)警。
2 故障查找
ALM380500報(bào)警的含義是PROFIBUS DP驅(qū)動(dòng)器連接出錯(cuò);E-608報(bào)警的含義是Z軸驅(qū)動(dòng)器速度調(diào)節(jié)器輸出達(dá)到極限。根據(jù)機(jī)床資料要求檢查驅(qū)動(dòng)器與電動(dòng)機(jī)和編碼器的連接、電動(dòng)機(jī)接地連接、編碼器類型及脈沖數(shù)的設(shè)定、檢查機(jī)械負(fù)載情況及更換驅(qū)動(dòng)器功率模塊或控制模塊故障等等。檢查機(jī)床驅(qū)動(dòng)器與電動(dòng)機(jī)、驅(qū)動(dòng)器與CNC的連接,確認(rèn)位置反饋極性、位置反饋連接均正確。電動(dòng)機(jī)編碼器與電動(dòng)機(jī)的連接也沒(méi)發(fā)現(xiàn)松動(dòng)。編碼器的類型及脈沖數(shù)的設(shè)定也正確。Z、Y軸共用一個(gè)雙軸驅(qū)動(dòng)模塊,為了判斷驅(qū)動(dòng)器是否有故障,把Z、Y軸電動(dòng)機(jī)動(dòng)力線及反饋線交換,結(jié)果Y軸運(yùn)動(dòng)正常、Z軸還是不能移動(dòng),因此排除驅(qū)動(dòng)器本身故障。天車吊起主軸配重,配重鏈能自由地上下移動(dòng),因此也不懷疑除電動(dòng)機(jī)外的機(jī)械故障。根據(jù)經(jīng)驗(yàn)判斷,此類故障剎車不能完全松開(kāi)也可能使電動(dòng)機(jī)負(fù)載增大,因此沒(méi)有把電動(dòng)機(jī)和機(jī)械脫開(kāi)進(jìn)行電動(dòng)機(jī)空轉(zhuǎn)試驗(yàn),就直接把電動(dòng)機(jī)從機(jī)床上拆卸下來(lái)進(jìn)行電動(dòng)機(jī)剎車的檢查。而檢查電動(dòng)機(jī)剎車必須拆卸編碼器,電工拆卸該編碼器的時(shí)候沒(méi)有做編碼器軸與電動(dòng)機(jī)軸的安裝零位標(biāo)記就直接把編碼器拆卸下來(lái)。調(diào)整電動(dòng)機(jī)剎車間隙使其剎車效果良好后試機(jī),驅(qū)動(dòng)器“使能”后Z軸出現(xiàn)飛車。出現(xiàn)此現(xiàn)象的原因可能是編碼器安裝的零位偏差造成電動(dòng)機(jī)轉(zhuǎn)子位置檢測(cè)的零位偏差引起不期望和不可控制的軸電流,造成電動(dòng)機(jī)無(wú)法正常轉(zhuǎn)動(dòng)。因此為了糾正較大的零位偏差,交換電動(dòng)機(jī)動(dòng)力線V、W兩相,驅(qū)動(dòng)器“使能”后不出現(xiàn)飛車,但伺服電動(dòng)機(jī)只轉(zhuǎn)動(dòng)約20°后驅(qū)動(dòng)器就出現(xiàn)E-608報(bào)警。把電動(dòng)機(jī)與機(jī)械脫開(kāi),驅(qū)動(dòng)器“使能”后電動(dòng)機(jī)仍舊轉(zhuǎn)20°后出現(xiàn)E-608報(bào)警。利用Simo ComU軟件聯(lián)機(jī)觀察611Ue驅(qū)動(dòng)器上伺服電動(dòng)機(jī)工作電流,發(fā)現(xiàn)電動(dòng)機(jī)慢慢轉(zhuǎn)動(dòng)時(shí),電動(dòng)機(jī)電流不斷增大,最后突然增大超過(guò)電動(dòng)機(jī)最大電流P1108設(shè)定的27 A,把最大電流增大時(shí)觀察電動(dòng)機(jī)工作電流仍然超過(guò)電動(dòng)機(jī)最大電流設(shè)定值。用新的電動(dòng)機(jī)更換后觀察也出現(xiàn)同樣的故障。由于驅(qū)動(dòng)器是好的,新的電動(dòng)機(jī)也不應(yīng)該有問(wèn)題,問(wèn)題出在哪兒呢?分析并回憶維修過(guò)程發(fā)現(xiàn)有可能是驅(qū)動(dòng)器與電動(dòng)機(jī)間的相序不對(duì)造成。把電動(dòng)機(jī)動(dòng)力線還原,使其與驅(qū)動(dòng)器的相序一一對(duì)應(yīng),試機(jī)電動(dòng)機(jī)工作正常。再利用Simo ComU軟件聯(lián)機(jī)觀察611Ue驅(qū)動(dòng)器上伺服電動(dòng)機(jī)工作電流,實(shí)際電流只有1 A左右,因此相序錯(cuò)誤造成新電動(dòng)機(jī)非正常工作。把新電動(dòng)機(jī)與Z軸絲杠連接,Z軸移動(dòng)0.62 mm后驅(qū)動(dòng)器又出現(xiàn)E-608報(bào)警。再次讓電動(dòng)機(jī)脫開(kāi)機(jī)械,Z軸工作正常,因此機(jī)械有故障。鉗工經(jīng)過(guò)分析檢查發(fā)現(xiàn)主軸配重的拖鏈軸承因滾珠研碎卡死不轉(zhuǎn)。更換該軸承后,故障全部排除。下面分析編碼器安裝的零位偏差造成的電動(dòng)機(jī)非正常工作的原因。
3 故障原因分析
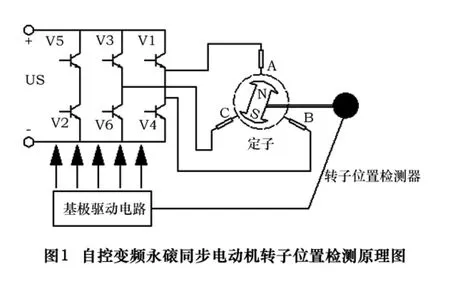
該電動(dòng)機(jī)型號(hào)為1FT6105-8AB71-3AH1,是自控變頻永磁同步電動(dòng)機(jī),其轉(zhuǎn)子位置傳感器為2048線正弦型增量編碼器ERN1378。由永磁同步電動(dòng)機(jī)的工作原理可知,定子電樞反應(yīng)磁場(chǎng)軸線必須時(shí)刻跟隨轉(zhuǎn)子旋轉(zhuǎn)并保持與轉(zhuǎn)子的磁極軸線垂直,只有在這樣的條件下,電動(dòng)機(jī)軸才能輸出與電流成正比的電磁轉(zhuǎn)矩。事實(shí)上,驅(qū)動(dòng)控制器一邊每時(shí)每刻從電動(dòng)機(jī)軸上獲取轉(zhuǎn)子位置信號(hào),用該轉(zhuǎn)子位置信號(hào)控制著逆變器功率開(kāi)關(guān)元件的觸發(fā)順序,一邊從直流母線上逆變出三相交流電壓,使電動(dòng)機(jī)中的三相電流產(chǎn)生的電樞反應(yīng)磁場(chǎng)軸線與轉(zhuǎn)子磁場(chǎng)軸線正交且同步旋轉(zhuǎn),因此轉(zhuǎn)子位置傳感器是使永磁交流伺服電動(dòng)機(jī)正常工作不可缺少的元件。只有合理的控制逆變器的觸發(fā)順序,才能使相電流和激磁電勢(shì)的相位保持同步。自控變頻永磁同步電動(dòng)機(jī)轉(zhuǎn)子位置檢測(cè)原理如圖1。
電工調(diào)整電動(dòng)機(jī)的剎車后編碼器的電氣零位與轉(zhuǎn)子的零位發(fā)生變化,使逆變器的功率元件觸發(fā)順序錯(cuò)亂,電動(dòng)機(jī)中的三相電流產(chǎn)生的電樞反應(yīng)磁場(chǎng)軸線與轉(zhuǎn)子磁場(chǎng)軸線不能正交并保持同步旋轉(zhuǎn),因此不能使電動(dòng)機(jī)正常工作,出現(xiàn)電動(dòng)機(jī)的飛車現(xiàn)象。為了避免電動(dòng)機(jī)出現(xiàn)飛車,把電動(dòng)機(jī)動(dòng)力線交換V、W兩相后不出現(xiàn)飛車。雖然不出現(xiàn)飛車但電動(dòng)機(jī)只能轉(zhuǎn)20°左右,驅(qū)動(dòng)器便出現(xiàn)報(bào)警。其原因是驅(qū)動(dòng)器輸出的三相動(dòng)力線與電動(dòng)機(jī)動(dòng)力線的連接不是一一對(duì)應(yīng)的相序造成。UVW三相動(dòng)力線與驅(qū)動(dòng)器的UVW三相接線端子之間的可能連接關(guān)系共有六種,以驅(qū)動(dòng)器接線端的UVW順序?yàn)檎_接入相序,則電動(dòng)機(jī)動(dòng)力線接入驅(qū)動(dòng)器端子后,包括一一對(duì)應(yīng)的“正常接入相序”電動(dòng)機(jī)UVW對(duì)驅(qū)動(dòng)器UVW在內(nèi),根據(jù)排列組合,共有6種可能的接入順序,分別為電動(dòng)機(jī)的UVW,UWV,VWU,VUW,WUV,WVU動(dòng)力線對(duì)驅(qū)動(dòng)器的UVW端子,因此驅(qū)動(dòng)器的U、V、W端子有可能分別被接入了電動(dòng)機(jī)的U或V或W相動(dòng)力線。由于電動(dòng)機(jī)的動(dòng)力線上的反電勢(shì)相位代表了電動(dòng)機(jī)的實(shí)際電角度,而驅(qū)動(dòng)器的UVW端子的輸出電壓電流波形間的相位取決于電動(dòng)機(jī)編碼器相位所表示的確定相序的電角度。因而,在電動(dòng)機(jī)動(dòng)力線的UVW相與驅(qū)動(dòng)器的UVW端子之間的對(duì)應(yīng)關(guān)系不同時(shí),就會(huì)出現(xiàn)驅(qū)動(dòng)電壓電流波形相位與電動(dòng)機(jī)反電勢(shì)相位之間的偏差。如果U-V-W正常接入相序,電角度偏移量為0,電角度增量為+Δθ,后續(xù)電角度可表示為+Δθ。此時(shí)伺服控制始終處于完全正交解耦的最佳狀態(tài),伺服系統(tǒng)正常工作。如果不是U-V-W相序接入,則電動(dòng)機(jī)電角度偏移量不為0,電動(dòng)機(jī)電角度增量方向可能與驅(qū)動(dòng)的逆轉(zhuǎn)方向一致,從而導(dǎo)致電動(dòng)機(jī)進(jìn)入正反饋區(qū)或者使電動(dòng)機(jī)稍動(dòng)后鎖死。電動(dòng)機(jī)的驅(qū)動(dòng)電流都會(huì)很快達(dá)到最大,直至出現(xiàn)過(guò)流或過(guò)載故障,引起停機(jī)。舊的電動(dòng)機(jī)的剎車被調(diào)整后出現(xiàn)了飛車,這就是由于編碼器安裝的零位偏差引起電動(dòng)機(jī)進(jìn)入正反饋區(qū),而調(diào)換電動(dòng)機(jī)相序后,則電動(dòng)機(jī)稍動(dòng)后因過(guò)流鎖死。因此只有一一對(duì)應(yīng)的“正常接入相序”電動(dòng)機(jī)UVW對(duì)驅(qū)動(dòng)器UVW,且編碼器檢測(cè)轉(zhuǎn)子無(wú)零位偏差,電動(dòng)機(jī)才能正常工作。
后來(lái)還原電動(dòng)機(jī)相序并經(jīng)過(guò)多次調(diào)整編碼器的安裝角度后,電動(dòng)機(jī)空載時(shí)可以自由旋轉(zhuǎn),但帶機(jī)械負(fù)載還是不能正常工作。原因是沒(méi)有實(shí)驗(yàn)條件調(diào)整編碼器,使其與轉(zhuǎn)子零位偏差為零,因此只有使用新電動(dòng)機(jī)。
4 結(jié)語(yǔ)
由上述維修過(guò)程可知伺服驅(qū)動(dòng)器報(bào)同樣E-608報(bào)警,前后的故障原因是不同的,開(kāi)始是主軸配重拖鏈軸承損壞引起的機(jī)械負(fù)載過(guò)大引起;而電動(dòng)機(jī)剎車被調(diào)整后驅(qū)動(dòng)器出現(xiàn)E-608報(bào)警是由于編碼器與電動(dòng)機(jī)轉(zhuǎn)子的固定電氣零位發(fā)生改變和電動(dòng)機(jī)相序的改變所致。因此自控變頻同步電動(dòng)機(jī)維修要注意以下幾點(diǎn):①驅(qū)動(dòng)器和電動(dòng)機(jī)動(dòng)力線間的一一對(duì)應(yīng)的UVW相序不能改變。②電動(dòng)機(jī)和機(jī)械脫開(kāi)時(shí)一定要做電動(dòng)機(jī)的空載實(shí)驗(yàn)確認(rèn)電動(dòng)機(jī)剎車是否真的沒(méi)松開(kāi),以避免盲目拆卸電動(dòng)機(jī)而使故障擴(kuò)大。③在確認(rèn)拆卸編碼器時(shí)一定要做好安裝標(biāo)記,以免編碼器與轉(zhuǎn)子的電氣零位發(fā)生變化導(dǎo)致電動(dòng)機(jī)的非正常工作。
猜你喜歡
汽車維修與保養(yǎng)(2019年7期)2020-01-06 03:30:42
汽車維護(hù)與修理(2016年10期)2016-07-10 08:17:41
鐵道通信信號(hào)(2016年4期)2016-06-01 12:10:19
電測(cè)與儀表(2016年5期)2016-04-22 01:13:50
汽車維修與保養(yǎng)(2015年12期)2015-04-18 07:51:49
汽車維修與保養(yǎng)(2015年8期)2015-04-17 03:32:52
汽車維修與保養(yǎng)(2015年6期)2015-04-17 03:31:50
汽車維修與保養(yǎng)(2015年7期)2015-04-17 02:12:40
汽車維修與保養(yǎng)(2015年2期)2015-04-17 01:30:34
汽車維護(hù)與修理(2015年2期)2015-02-28 12:15:39
