工廠區(qū)域內(nèi)人員軌跡魯棒性跟蹤優(yōu)化方法研究
2024-12-06 00:00:00梁柏龍楊寶明才松可
中國新技術(shù)新產(chǎn)品
2024年8期













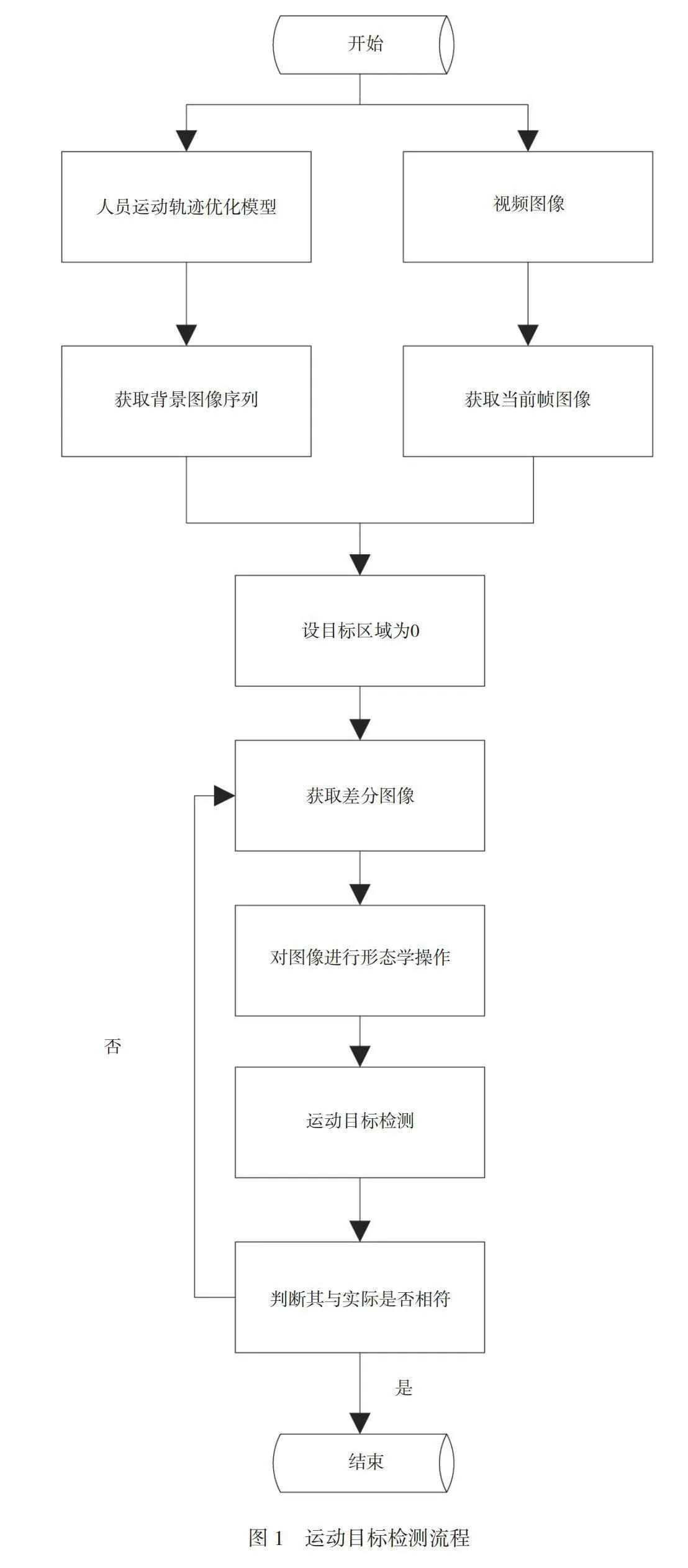




摘 要:傳統(tǒng)跟蹤優(yōu)化方法直接對運動目標(biāo)進行檢測,并沒有對人員運動軌跡優(yōu)化模型進行構(gòu)建,因此傳統(tǒng)方法蹤效果較差。本文提出工廠區(qū)域內(nèi)人員軌跡魯棒性跟蹤優(yōu)化方法研究。通過構(gòu)建人員運動軌跡優(yōu)化模型來提高運動軌跡跟蹤精度,設(shè)計運動目標(biāo)檢測流程,對運動目標(biāo)進行檢測,基于魯棒性算法生成可視化運動軌跡,完成工廠區(qū)域內(nèi)人員軌跡魯棒性跟蹤優(yōu)化方法設(shè)計,并進行對比試驗。試驗結(jié)果表明,該研究方法在實際應(yīng)用中跟蹤效果最好,值得推廣。
關(guān)鍵詞:人員軌跡;魯棒性;跟蹤優(yōu)化;跟蹤方法
中圖分類號:G 642" " " " " " 文獻標(biāo)志碼:A
工廠區(qū)域內(nèi)人員軌跡跟蹤是對人員的位置和移動信息進行采集和處理,從而獲得人員的移動路徑[1]。由于人員行為的復(fù)雜性和環(huán)境干擾的多樣性,因此影響了軌跡跟蹤的準(zhǔn)確性和魯棒性[2]。國內(nèi)外學(xué)者在工廠區(qū)域內(nèi)人員軌跡跟蹤方面進行研究[3],采用基于深度學(xué)習(xí)的數(shù)據(jù)預(yù)處理方法提取有效特征和提高數(shù)據(jù)質(zhì)量;采用基于機器學(xué)習(xí)的軌跡建模方法建立人員的移動模式和行為習(xí)慣模型。但是現(xiàn)有的研究方法仍存在一定的局限性,例如數(shù)據(jù)處理復(fù)雜度高、軌跡建模難度大等。因此,需要進一步研究。針對現(xiàn)有研究的不足和實際應(yīng)用需求,本文提出一種全新的工廠區(qū)域內(nèi)人員軌跡魯棒性跟蹤優(yōu)化方法,旨在提高工廠區(qū)域內(nèi)人員軌跡跟蹤的準(zhǔn)確性和魯棒性,為工廠的安全生產(chǎn)和運營管理提供有力支持。……
登錄APP查看全文
