無人機(jī)傾斜攝影中密集匹配點(diǎn)云的處理與應(yīng)用研究
2024-12-06 00:00:00齊濤
中國新技術(shù)新產(chǎn)品
2024年13期
關(guān)鍵詞:無人機(jī)


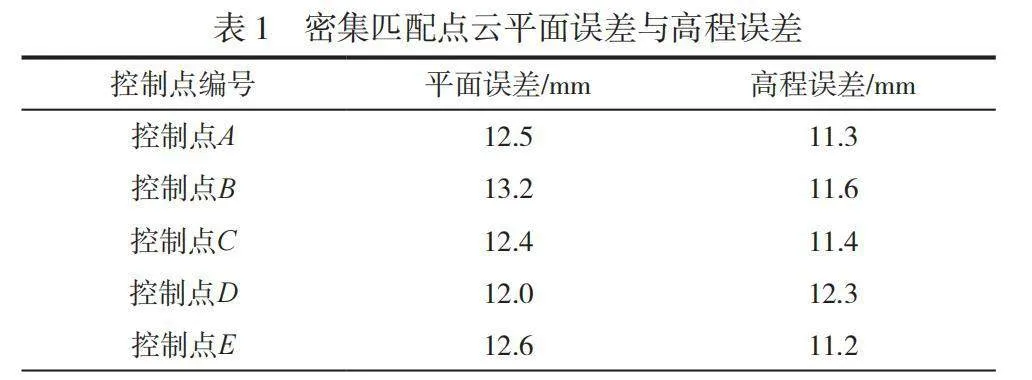



摘要:本文針對(duì)密集匹配點(diǎn)云處理精度過低的問題,進(jìn)行了無人機(jī)傾斜攝影中密集匹配點(diǎn)云的處理與應(yīng)用研究。本文提出的新的處理方案包括無人機(jī)航測(cè)飛行平臺(tái)搭載相機(jī)標(biāo)定、無人機(jī)傾斜攝影影像特征點(diǎn)提取與匹配、三角測(cè)量與多視影像密集匹配。將新的處理方案應(yīng)用于真實(shí)研究區(qū)域內(nèi),可以對(duì)密集匹配點(diǎn)云進(jìn)行高精度處理,降低各控制點(diǎn)平面誤差與高程誤差,提升無人機(jī)傾斜攝影應(yīng)用廣泛性。
關(guān)鍵詞:無人機(jī);傾斜;影像;密集;匹配;點(diǎn)云
中圖分類號(hào):P23""""""""" 文獻(xiàn)標(biāo)志碼:A
隨著無人機(jī)技術(shù)不斷發(fā)展,無人機(jī)傾斜影像技術(shù)已經(jīng)廣泛應(yīng)用于各個(gè)領(lǐng)域。在無人機(jī)傾斜影像處理過程中,密集匹配點(diǎn)云的處理是非常重要的環(huán)節(jié)。無人機(jī)傾斜影像密集匹配點(diǎn)云是使用無人機(jī)傾斜攝影獲取影像數(shù)據(jù),采用立體匹配算法計(jì)算每個(gè)像素點(diǎn)的三維坐標(biāo)信息[1]。其基本原理是利用多視角圖像之間的信息,利用幾何變換和映射關(guān)系將不同視角的圖像轉(zhuǎn)換至同一個(gè)坐標(biāo)系中,根據(jù)像素之間的顏色和空間信息計(jì)算每個(gè)像素點(diǎn)的深度信息,得到密集的點(diǎn)云數(shù)據(jù)。
無人機(jī)傾斜影像密集匹配點(diǎn)云的應(yīng)用領(lǐng)域非常廣泛,主要包括以下5個(gè)方面。1)城市規(guī)劃。對(duì)城市建筑物的點(diǎn)云數(shù)據(jù)進(jìn)行分析并處理,可以獲取建筑物的三維信息,為城市規(guī)劃提供參考。2)土地資源調(diào)查。利用無人機(jī)傾斜影像密集匹配點(diǎn)云技術(shù),可以快速獲取大范圍土地資源的三維信息,為土地資源調(diào)查提供數(shù)據(jù)支持。……
登錄APP查看全文
猜你喜歡
電腦知識(shí)與技術(shù)(2016年28期)2016-12-21 12:21:32
電子技術(shù)與軟件工程(2016年19期)2016-12-19 18:28:28
新教育時(shí)代·教師版(2016年27期)2016-12-06 18:14:59
中國科技縱橫(2016年17期)2016-11-30 11:51:57
農(nóng)機(jī)使用與維修(2016年10期)2016-11-10 09:45:55
人間(2016年26期)2016-11-03 17:52:40
中國科技博覽(2016年22期)2016-11-01 18:10:31
科技視界(2016年22期)2016-10-18 14:30:27
企業(yè)導(dǎo)報(bào)(2016年9期)2016-05-26 20:58:26
