基于夜間環(huán)境下的車道線檢測
2024-11-04 00:00:00曾麗娟劉嘉煒敖邦乾
遵義師范學(xué)院學(xué)報 2024年5期



摘 要:針對夜間道路光線不足、圖像亮度較暗、不容易檢測車道線的問題,提出一種在夜間環(huán)境下的車道線檢測方法。第一部分進行夜間圖像增強:首先對灰度化的圖像進行雙重濾波降噪處理,通過比較不同區(qū)域的圖像灰度值,使用局部直方圖均衡化算法增強部分區(qū)域?qū)Ρ榷龋俨捎美绽顾阕訉D像進行增強,圖像的紋理和細節(jié)得到有效的提升,然后最后通過伽馬變換矯正整體圖像。第二部分進行車道線邊緣檢測:對處理后的圖像進行Canny算子邊緣檢測,擬合車道直線部分采用概率霍夫變換。結(jié)果表明,該方法具有較強的夜間車道線檢測能力,為智能駕駛提供了安全保障。
關(guān)鍵詞:圖像增強;雙重濾波;車道線檢測;邊緣檢測
中圖分類號: TP391.41 " " " " " " " " " " " " " " " " " " " " " "文獻標識碼: A文章編號:1009-3583(2024)-0085-04
Lane-line detection based on Night-time Environment
ZENG Li-juana, LIU Jia-weib, AO Bang-qianb*
(a.School of Physics and Electronics; b. School of Engineering, Zunyi Normal University, Zunyi 563006, China )
Abstract:As the image is not very clear making it difficult to detect lane lines, a lane line detection algorithm in the night environment is proposed for the problem that the road is not well lit at night. The first part performs nighttime image enhancement. First, the detected image is double-filtered and noise-reduced, and the contrast of some areas is enhanced by comparing the values of different areas using a local histogram equalisation algorithm. Second, the image is enhanced by applying the Laplacian operator, the texture and details of the image are effectively enhanced. Finally, the overall image is corrected by using Gamma transformation. In the second part, the edge detection of the lane lines is performed: the processed image is edge detected by applying the Canny operator and the lane line part is fitted with the Progressive Probabilistic Hough Transform. The results show that the proposed algorithm has a strong ability to detect lane lines at night, which provides safety for intelligent driving.
Keywords:image enhancement; double filtering; lane line detection; edge detection
路徑規(guī)劃[1]和車道檢測[2]是自動駕駛和先進輔助系統(tǒng)的兩個非常重要的部分,其中車道檢測主要有兩種方法:基于深度學(xué)習(xí)[3]的車道檢測算法,其對圖像的處理具有更準確的識別能力,但它需要構(gòu)建復(fù)雜的模型結(jié)構(gòu),計算量大、效率低、成本高;基于圖像識別[4]的車道檢測算法[5-6],其中圖像增強法[7-10]可以有效地提高車道線識別的準確率,在很大程度上能夠適應(yīng)夜間環(huán)境的車道線檢測,且其算法比較簡單,適用于較多場合。本文首先對夜間圖像通過加權(quán)平均值灰度化,雙重濾波降噪處理后,然后使用增量式方法進行局部直方圖增強、拉普拉斯變換以及伽馬變換對圖像進行處理,最后再使用Canny和概率霍夫變換檢測出車道線。
1" 圖像增強
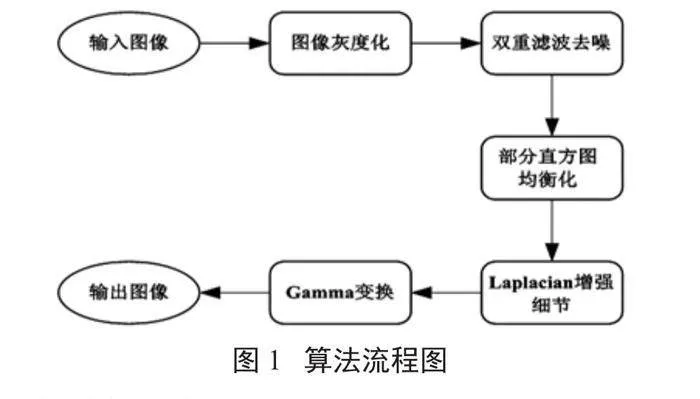
為了提高夜間車道線檢測的準確性,使用圖像增強法來增強夜間圖像,以更好地識別夜間道路圖像中的車道特征,有助于從圖像中提取特征信息,提高車道線檢測的準確性,其算法流程如圖1所示。
1.1" 圖像灰度化
本文采用加權(quán)平均值算法用于圖像的灰度化處理,根據(jù)三個分量的重要性不同,以不同的權(quán)重進行平均。由于人眼對綠色比較敏感,對藍色不太敏感,將R、G、B三種顏色分量進行加權(quán)平均處理,即可得到其灰度圖像,處理效果對比如圖2所示。
1.2" 雙重濾波降噪
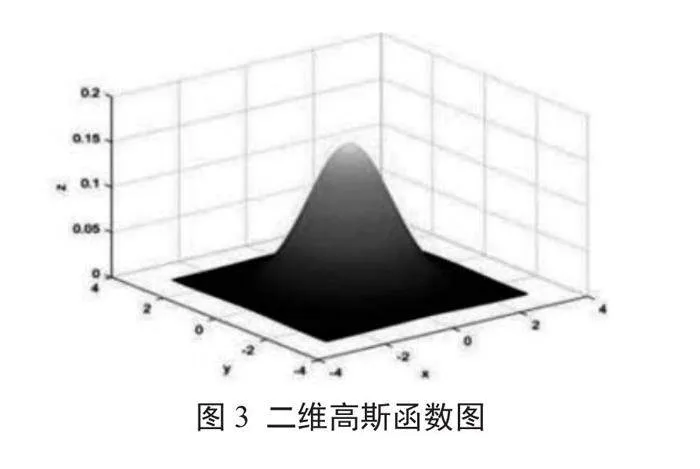
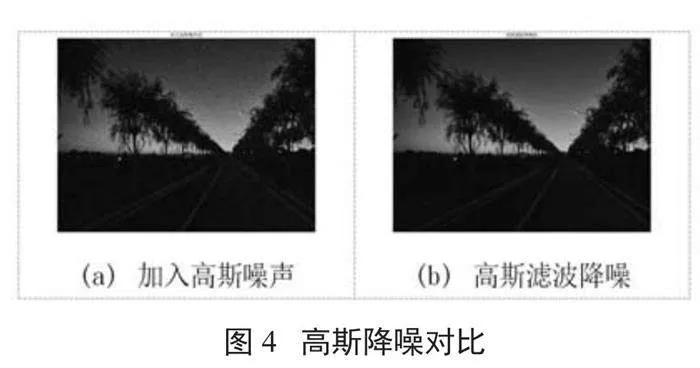
為了解決隨時可能出現(xiàn)的不同噪聲,本文采用兩種算法處理圖像。高斯濾波是一種常見的線性濾波技術(shù),它的核心思想在于利用二維高斯函數(shù)對圖像進行卷積來實現(xiàn)圖像的平滑處理。在卷積過程中,濾波器的大小和標準差決定了濾波器的強度和作用范圍。標準差越大,濾波器的作用范圍就越廣,平滑效果越明顯;標準差越小,濾波器的作用范圍就越小,平滑效果也越弱。其二維高斯函數(shù)圖像如圖3所示。其降噪效果圖4所示。
中值濾波是一種基于統(tǒng)計排序理論的圖像處理技術(shù),它使用以像素點為中心的一定大小的相鄰像素的中值灰度值替換當前像素的灰度值,以達到去除噪聲的目的。具體步驟如下:
1.定義一個以當前像素點為中心的鄰域大小(n*n);
2.根據(jù)灰度值對該鄰域的像素進行排序;
3.使用平均值(或中位值)作為當前像素的新灰度值。
重復(fù)上述步驟來處理整個圖像,其降噪對比效果圖如圖5所示。
1.3" 采用增量式方法進行的局部直方圖均衡化
本文采用基于增量式方法的局部直方圖均衡化,使用滑動窗口逐步處理每個子圖像,避免了同時處理大規(guī)模數(shù)據(jù),復(fù)雜程度得到了大幅降低,加快了計算速度,具有更好的自適應(yīng)性,同時也保持了圖像的連續(xù)性和平滑性,不會出現(xiàn)突變的明暗交接處。對圖像分別使用全局直方圖均衡化,局部直方圖均衡化,增量式方法進行的局部直方圖均衡化分別對圖像進行處理,如圖6所示。
1.4" 拉普拉斯增強細節(jié)
拉普拉斯圖像增強是一種使用拉普拉斯算子改善圖像邊緣的方法,這是一種鄰域增強算法,是基于計算圖像鄰域內(nèi)像素的灰度水平的二階微分的結(jié)果。當中心像素的灰度值低于其周圍像素的平均灰度水平時,該像素的灰度值會降低;反之,當中心像素的灰度值高于其周圍像素的平均灰度水平時,該像素的灰度值會增加。應(yīng)用拉普拉斯變換進行圖像銳化的基本方法可以表達如下,如果拉普拉斯公式的中心系數(shù)是負值時用公式(1),如果拉普拉斯公式中心系數(shù)為正值時用公式(2):
(1)
(2)
對于二維圖像f(x,y),二階微分最簡單的拉普拉斯算子定義為:
(3)
本文采用改進的8鄰域模板進行計算,其模板如下:
(4)
其處理效果如圖7所示。
1.5" 伽馬變換
Gamma校正是一種非常重要的非線性變換,其通過對輸入圖像的灰度值進行指數(shù)變換來校正亮度的變化,以此達到增強圖片細節(jié)的作用。通常情況下,Gamma校正值是通過下述冪函數(shù)所定義的:
(5)
式(5)中,Iout是輸出圖像,Iin是輸入圖像,當 等于1時,輸入和輸出值在0到1之間,是一種線性變換。當 小于1時,這個過程會增加低灰度值區(qū)域的動態(tài)范圍,從而提高圖像的對比度。同時,高灰度值區(qū)域的動態(tài)范圍會縮小,導(dǎo)致圖像的對比度減小,但整體的灰度值會增加。當 大于1時,低灰度值區(qū)域的動態(tài)范圍會縮小,導(dǎo)致圖像的對比度減小。同時,高灰度值區(qū)域的動態(tài)范圍會擴大,導(dǎo)致圖像的動態(tài)范圍增加,但灰度值總體上也會增加。因此,Gamma校正的應(yīng)用主要集中在圖像增強、目標檢測和圖像分析領(lǐng)域,其檢測效果圖如圖8所示。
2" 車道線檢測
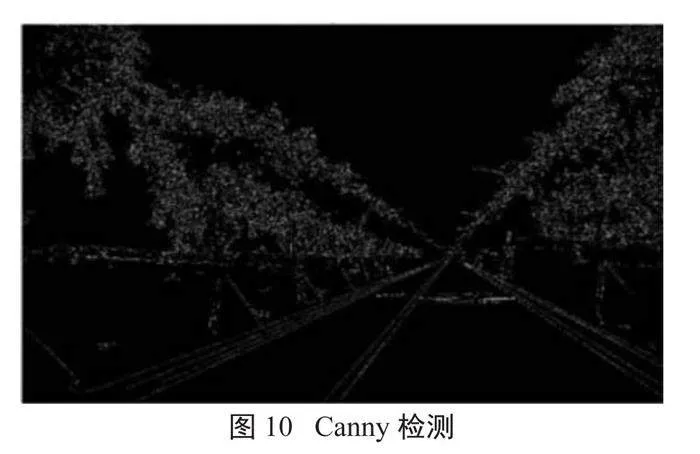
2.1" Canny邊緣檢測
Canny邊緣檢測算子是一種被廣泛應(yīng)用于處理圖像的算法,它準確地定義了圖像中的邊緣,Canny邊緣檢測有四個步驟:首先,對原始圖像使用高斯濾波去掉噪聲,從而避免干擾;其次,通過Sober算子分別計算出圖像在水平和豎直方向上的梯度,公式如下:
其中I表示原始圖像,Gx和Gy分別表示水平和豎直方向上的梯度,M表示像素點的梯度幅值, 表示梯度方向;然后,進行非極大值抑制,針對每個像素,需要確定其周圍3*3的梯度值。如果一個像素的梯度值不是周圍八個像素中最大的,那么需要將它的梯度值設(shè)為零;接著使用雙閾值檢測方法將保留的像素點分為強邊緣、弱邊緣和無效邊緣三類。具體來說,如果某個像素點的梯度值超過了設(shè)定的高閾值,則將其歸為強邊緣;如果某個像素點的梯度值低于設(shè)定的低閾值,則將其歸為無效邊緣;如果某個像素點的梯度值介于高低閾值之間,則將其歸為弱邊緣。最后,采用連接分析方法來確定哪些弱邊緣應(yīng)該被保留為最終的邊緣。通常情況下,如果某個弱邊緣與某個強邊緣相連,則將其保留為最終的邊緣;否則,將其歸為無效邊緣。
2.2" 概率霍夫變換
概率Hough變換是一種基于Hough變換原理的直線擬合算法。在概率Hough變換中,隨機選擇少量的數(shù)據(jù)點(也稱為抽樣),用來估計直線的參數(shù),其步驟為:
1.對于一組給定的數(shù)據(jù)點,定義參數(shù)空間,這個參數(shù)空間包含一條線的所有可能的參數(shù)。線條有兩個重要參數(shù):斜率和交點。
2.對于每個數(shù)據(jù)點,在參數(shù)空間中找到與該點相關(guān)的所有直線。
3.對于每條線,在參數(shù)空間中對應(yīng)點的計數(shù)器上加1,就可以增加一個計數(shù)器,這個過程可以被認為是在參數(shù)空間里畫一條曲線。
4.重復(fù)步驟2-3,直到所有的數(shù)據(jù)點都被計算在內(nèi)。
3" 實驗結(jié)果與分析
3.1 實驗結(jié)果
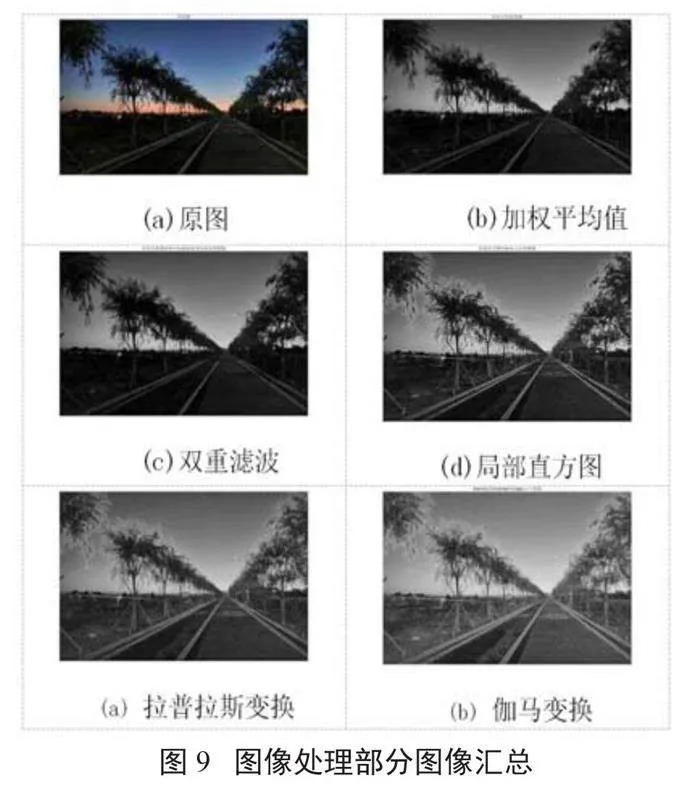
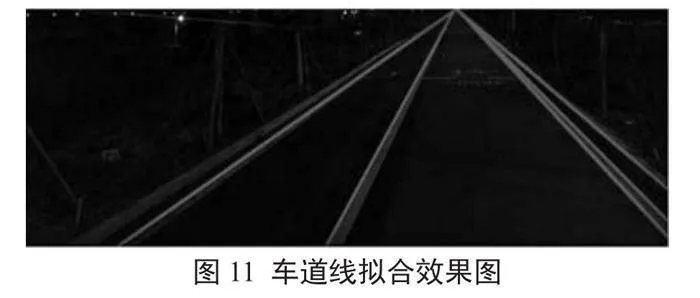
為了檢驗文中算法的實際效果,通過MATLAB 2016b軟件進行仿真實驗,圖9、圖10、圖11分別為圖像增強的過程、邊緣檢測的結(jié)果以及最終擬合直線的效果,可以看出本算法在一系列對圖像的增強處理后,能夠準確識別并描繪出車道線圖像。
3.2" 分析
為了有效檢測夜間環(huán)境下的車道線檢測,首先,從原始圖像中讀入圖像之后通過執(zhí)行RGB向灰度圖像變
換,然后通過加權(quán)平均值法將圖像進一步轉(zhuǎn)化為灰度圖像,并進行基于高斯和中值的雙重降噪;然后,采用增量式局部直方圖均衡化方法來增強圖像的對比度,并對圖像進行拉普拉斯濾波和Gamma矯正,從而使得車道線更加明顯。在經(jīng)過這些處理之后,可以看出圖像已經(jīng)明顯變得清晰,車道線的信息也更加明顯;接下來,使用Canny算子對圖像進行邊緣檢測;最后,則使用概率Hough變換得到車道線的位置。通過設(shè)置Hough變換的參數(shù),如角度范圍和閾值等,可以很好地適應(yīng)不同的道路情況,并精確地檢測出車道線,相比于其他算法,本文在車道線檢測的靈活性及魯棒性方面具有較大的優(yōu)勢。在擬合車道線時,則采用找兩條斜率合適的直線來擬合車道線的方式。
4" 結(jié)論
由于夜間車道線檢測受到夜間圖像不清晰以及光照不足的影響,會導(dǎo)致車道線檢測不精確的問題,因此本文使用了多種算法增強其準確性。其中圖像增強部分旨在使在夜間拍攝的圖像變得足夠清晰,通過圖像灰度化、雙重濾波降噪、部分直方圖均衡化、拉普拉斯變換、Gamma變換來實現(xiàn),為后續(xù)車道線檢測做鋪墊。車道線檢測部分將使用Canny算子和概率霍夫變換對車道線進行提取和擬合。實驗證明本方法擁有較好的車道線檢測性能,尤其是在夜間環(huán)境光線不是很好的情況下,本文所使用的方法具有較強的魯棒性。
參考文獻:
[1]任群.基于人工智能算法的機器人路徑規(guī)劃研究[J].遵義師范學(xué)院學(xué)報,2018,20(1):107-110.
[2]劉莉.智能交通場景的車道線檢測方法研究[D].南京:南京航空航天大學(xué), 2020.
[3]宋揚,李竹.基于深度圖像增強的夜間車道線檢測技術(shù)[J].計算機應(yīng)用,2019,39(S2):103-106.
[4]余云,王本勝,姚麗莎.融合項目屬性和云填充的計算機智能圖像識別算法[J].遵義師范學(xué)院學(xué)報,2018,20(3):81-83.
[5]張彬騰,張寧,袁敏.復(fù)雜光照環(huán)境的車道線檢測方法[J].汽車實用技術(shù),2022,47(13):21-25.
[6]辛超,劉揚.基于概率霍夫變換的車道線識別算法[J].測繪通報,2019(S2):52-55.
[7]鄧鑫,陳紫強,郭朦,等.基于光照補償?shù)囊归g車道線檢測方法[J].激光雜志,2022,43(2):71-76.
[8]王軍,林宇航,賈玉彤,等.一種改進Canny算子的圖像邊緣檢測算法[J].小型微型計算機系統(tǒng),2024,45(6):1413-1417.
[9]金智林,何麟煊,趙萬忠.用于智能汽車的復(fù)雜光照環(huán)境車道線檢測及跟蹤方法[J].汽車安全與節(jié)能學(xué)報, 2019,10(4):459-466.
[10]謝昌剛.基于單目視覺的車道線識別與車道偏離預(yù)警技術(shù)研究[D].南京:南京航空航天大學(xué),2019.
[11]汪樂意.基于FPGA的雙目立體視覺圖像采集及預(yù)處理系統(tǒng)的設(shè)計[D].西安:西安科技大學(xué), 2019.
[12]肖世昌,成剛虎,國強.用于網(wǎng)版印刷自動套印的十字線檢測新方法[J].中國印刷與包裝研究,2012,4(2):35-41.
(責(zé)任編輯:羅智文)
