智能檢測機器人在隧道施工質量控制中的應用
2024-10-30 00:00:00方平洋盧喜張希龍孫凌順劉聰
交通科技與管理 2024年19期




摘要 隨著公路隧道的不斷建設,傳統的公路隧道施工質量檢測效率不佳、范圍有限、成本高昂的弊端愈發凸顯,難以滿足檢查要求。該研究以大龍山隧道為研究對象,提出了應用智能檢測機器人對隧道施工階段進行質量控制檢測工作的檢測方法,通過機器人掃描隧道內部結構,測量隧道內輪廓的點云三維坐標、圖像和紋理等信息。并通過SLAM GO POST軟件對點云數據和圖像進行了建模分析,在得到隧道形狀和位置信息的同時,提高了測量工作效率。工程實踐結果表明:智能檢測機器人在隧道施工質量控制中的應用,能夠滿足隧道質量檢測的精度要求,檢測結果驗證了該方法具有合理高效、成本低廉、作業方式靈活等特點,使隧道施工質量檢測實現智能化、信息化,可以作為一種有效的隧道內輪廓測量方式,服務于交通工程設計與施工。
關鍵詞 智能檢測機器人;隧道施工;三維點云;質量控制
中圖分類號 U415 文獻標識碼 A 文章編號 2096-8949(2024)19-0018-04
0 引言
隨著社會的快速發展,我國地下工程的修建規模和數量已達世界之最,地下建筑技術飛速發展[1]。隨著公路的不斷建設,對公路隧道進行形變檢測變得尤其重要[2],隧道施工的質量直接影響隧道的耐久性,對隧道施工質量檢測問題需要采用更加復雜的方式[3-5]。事后解決質量問題需要花費大量的時間和費用,在隧道施工過程中快速檢測施工質量可以降低整修的費用和時間。基于傳統的全站儀,進行隧道開挖、支護、二次襯砌斷面的檢測,不僅浪費大量的人力、物力,且采集數據較少,導致檢測只能反映隧道內局部現象,不能及時發現形變造成的重大安全隱患[6]。移動式三維激光掃描技術的出現,為隧道測量提供了新的解決方案[7-8]。國內外學者提出了改進測量技術的方案,Yu等[9]在研究中通過全站儀和地面激光掃描儀對隧道襯砌進行了形變監測,但其方法仍受到數據獲取效率低的限制。首都師范大學集成多個設備采集隧道橫斷面點云數據[10],使用傳感器較少,采集簡單方便,但是只通過里程定位橫斷面獲取所得的相對點云數據無法顯示隧道的曲線形狀,失去了隧道真實幾何形態和絕對坐標。Dongfeng等[11]使用地面激光雷達對隧道進行了三維激光掃描和變形監測,但應用范圍有限,不能應用到開挖隧道和不規則隧道。
盡管這些研究在隧道施工驗收和結構健康檢測領域取得了顯著進展,但大多數方法仍存在測量效率低、數據處理復雜、應用場景受限等問題。相比之下,該研究基于智能檢測機器人測量技術,能夠有效克服上述挑戰。智能檢測機器人通過掃描隧道內輪廓結構,獲取隧道初期支護和二次襯砌的內輪廓數據。并通過SLAM GO POST軟件自動解算,實時獲取隧道內輪廓特征的形狀和位置信息,大大提高了測量工作的效率和精度。這一創新技術不僅簡化了操作流程,還擴展了應用范圍,尤其在隧道內部結構的高效測量和建模中具有獨特優勢。
1 工程概況
該課題依托安徽省安慶市宜秀區楊橋鎮大龍山1號、2號隧道,設計采用分離式隧道方案。1號隧道右線長1 668 m,左線長1 672 m,為長隧道;大龍山2號右線長2 432 m,左線長2 426 m,為長隧道。根據《天天高速公路無為至安慶段詳細地質勘察報告》,大龍山隧道圍巖分級大部分被劃分為III、IV和V等級。
在隧道施工過程中,智能檢測機器人配合SLAM100在隧道施工環節獲取的點云、全息影像信息,詳細記錄了隧道構造物、周邊環境的實景信息,經過軟件系統的自動化處理、加工,為隧道質量檢測大數據分析提供了必要的基礎數據。隧道施工質量檢測流程如圖1所示。
2 智能檢測機器人系統組成及技術原理
2.1 SLAM100技術簡介
SLAM100是飛馬機器人推出的移動式激光雷達掃描儀,如圖2所示,該系統具有360°旋轉云臺,可形成270°×360°點云覆蓋,結合行業級SLAM算法,可在無光照、無GPS條件下獲取周圍環境高精度、高精細度的三維點云數據。
SLAM100選用三顆500萬像素自動采集攝像頭,可形成寬200°、高100°超寬視場角,在光照條件下同時獲取紋理信息,生產彩色點云和局部全景圖。SLAM100采用一體化結構設計,內置控制和存儲系統,內置可更換鋰電池,一鍵式啟動作業,使數據獲取更加高效、便捷。SLAM100可選用SLAM GO手機App軟件,查看和管理工程,自動與云端工程信息同步顯示,進行實時SLAM拼圖和實時預覽,進行固件升級和設備維護等操作。基于飛馬無人機管家SLAM GO POST軟件模塊,可實現數據后處理、彩色點云生產、數據拼接、數據優化、瀏覽和量測等功能。如圖3所示。
(1)測距
目前我們所使用到的激光雷達傳感器多為脈沖式,使用TOF測量原理完成距離測量,使用高精度編碼盤實現角度測量。
TOF(Time of flight),飛行時間法,即通過計算激光發出到測量物體反射后回到激光器內的激光的飛行時間,乘以光的速度除以2計算得到,屬于主動式測量,所以不需要外部光照。
測量距離:
distance=c?t 2 (1)
其中,c為光速(m/s),?t為激光發出和接收的時間差(s)。
(2)測角
使用高精度編碼度盤可以獲取高精度的水平角度φ(°),結合固定的垂直角度?(°),通過極坐標計算公式可以計算得到以激光器中心為原點的xyz值。
2.2 智能檢測機器人技術簡介
智能檢測機器人體身為2 m×1 m×1.5 m(長×寬×高),自身攜帶電源、光源、雷達、供電設備、導線、拓展接口、NFC、激光傳感器、旋轉云臺、相機、無線網、遙控器等設備組成一體式結構。如圖4所示。智能檢測機器人由履帶制動是考慮隧道內部環境不規則,可能有斜坡或松散的地面,履帶可以適應各種地面條件,提供更好的穩定性。
2.3 隧道質量檢測工作原理
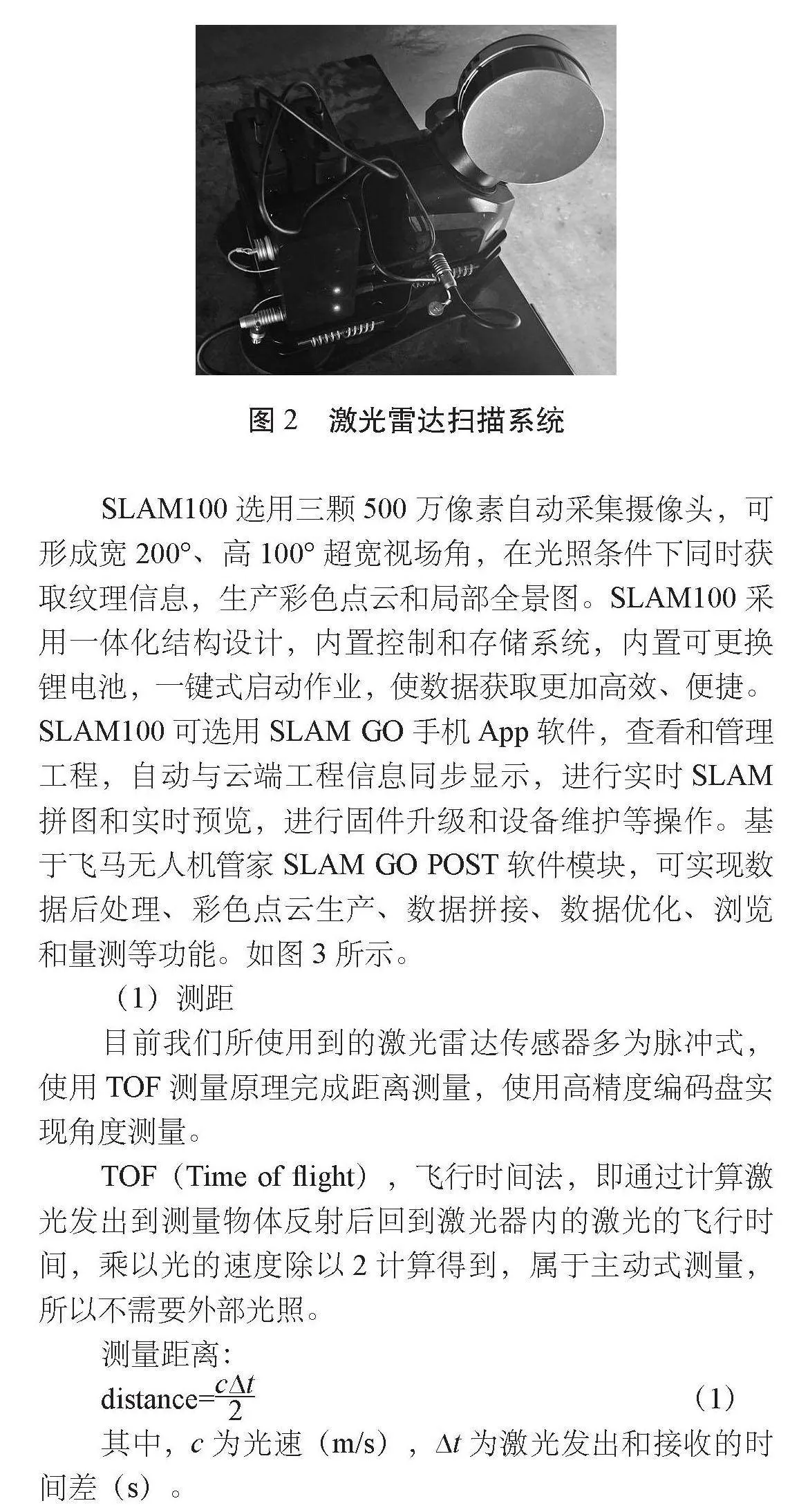
在隧道質量檢測工作過程中,不乏大型機器或碎石可能對檢測人員造成傷害,隧道施工環境十分復雜,且工作效率低,因此在檢測過程中,智能檢測機器人可以通過遠程遙控進入隧道,遙控距離可達數公里,可完全滿足實驗需求,不需要檢測人員進入隧道,保護人員安全。隧道內部環境可通過智能檢測機器人上的兩個海康威視DS-2DC4C122IMW-DE 20/F1 S6監控設備,詳細信息如表1所示。500萬監控全彩球機,每個球機包含兩個監控和兩個補光燈,可以360°觀看機器人周邊環境,前端有兩顆500萬像素固定監控和四個補光燈,當機器人在遠程作業時,可將前方視野傳送給遠程遙控器SIYI。
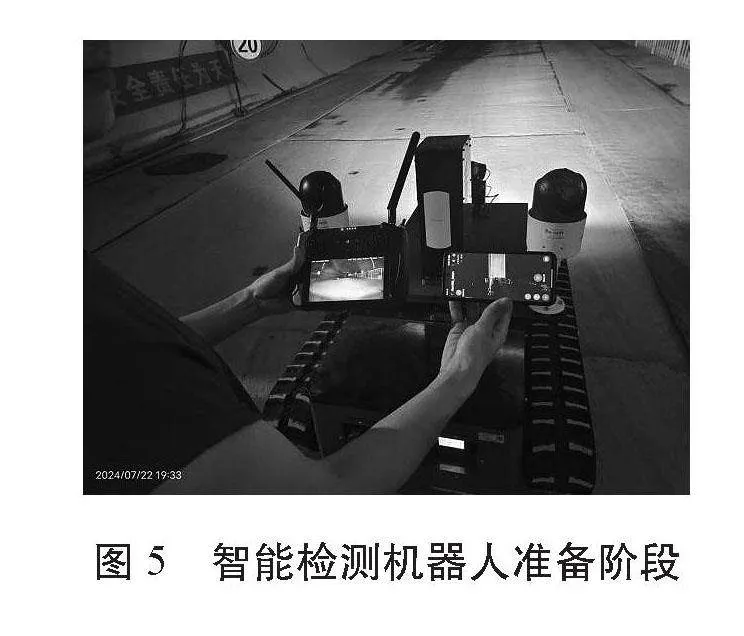
準備階段,檢測工作人員可在隧道洞口外進行操作,打開智能檢測機器人電源,連接遙控器SIYI,展示機器人前方畫面,并通過手機和電腦連接機器人的無線網,打開iVMS客戶端連接機器人的海康威視球機,顯示機器人四周畫面,之后打開SLAM 100顯示綠燈并閃爍,打開手機SLAM GO軟件連接SLAM 100,按照手機提示,附近避免有人員走動,并開啟一分鐘內應靜止不動,待機器人顯示燈閃爍時表示準備完畢,如圖5所示。
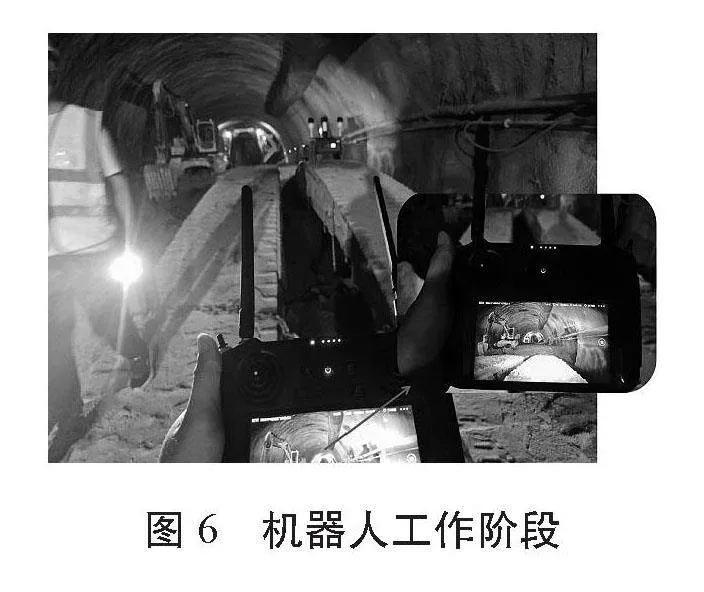
工作階段,檢測人員通過遙控器SIYI控制機器人進入隧道,為保證人員安全,智能檢測機器人沿隧道初期支護架橋危險區段勻速向前行,并記錄隧道三維點云數據和隧道內輪廓照片發送至手機和電腦,提供后臺工作人員使用。如圖6所示。此外,在進洞時需注意,在特征、紋理豐富區域獲取的數據一般情況下SLAM GO會有良好的解算結果,針對長直隧道無明顯特征等環境,為了保證w27cLf1E4bap+AwR/ZZQJw==解算精度,可以在前方無明顯特征時暫停SLAM GO,并重新靜置一分鐘后繼續前進,從而提高解算精度。
3 工程實際應用
3.1 作業情況和效率
在智能檢測機器人系統對隧道整體進行質量檢測的過程中,共掃描了大龍山3個隧道6個洞口全局的點云數據,并有照片和視頻記錄,分別為大龍山1號隧道出口,2號隧道進口和2號隧道的出口的左、右洞的初期支護和二次襯砌。隧道施工方法包括分部開挖法、臺階法、全斷面法等多種開挖形式,對隧道整體采用機器人系統一體式采集作業方法。智能檢測機器人的數據收集速度較快(0.4 m/s)。由于智能檢測機器人在無明顯特征時需要手機控制SLAM GO暫停,且開啟后靜置1 min,因此當前方沒有移動物體時再開始采集,采集過程中,盡量讓智能檢測機器人沿著中心線前進,因此智能檢測機器人是將隧道分階段檢測。隧道內部機器繁多,環境復雜,靜置時間內無法避免有物體移動,需要多次嘗試,因此機器人在遇到特殊情況時,應對措施時間較慢,根據隧道曲線段的長度情況,在每個作業時段耗時約1 h,每個作業段1人即可采集完成。在檢測過程中,總檢測路段5 215 m,總時長244 min,其中1號隧道出口用時75 min,2號隧道進口用時86 min,2號隧道出口用時83 min。具體工作內容如表2所示。
3.2 成果展示
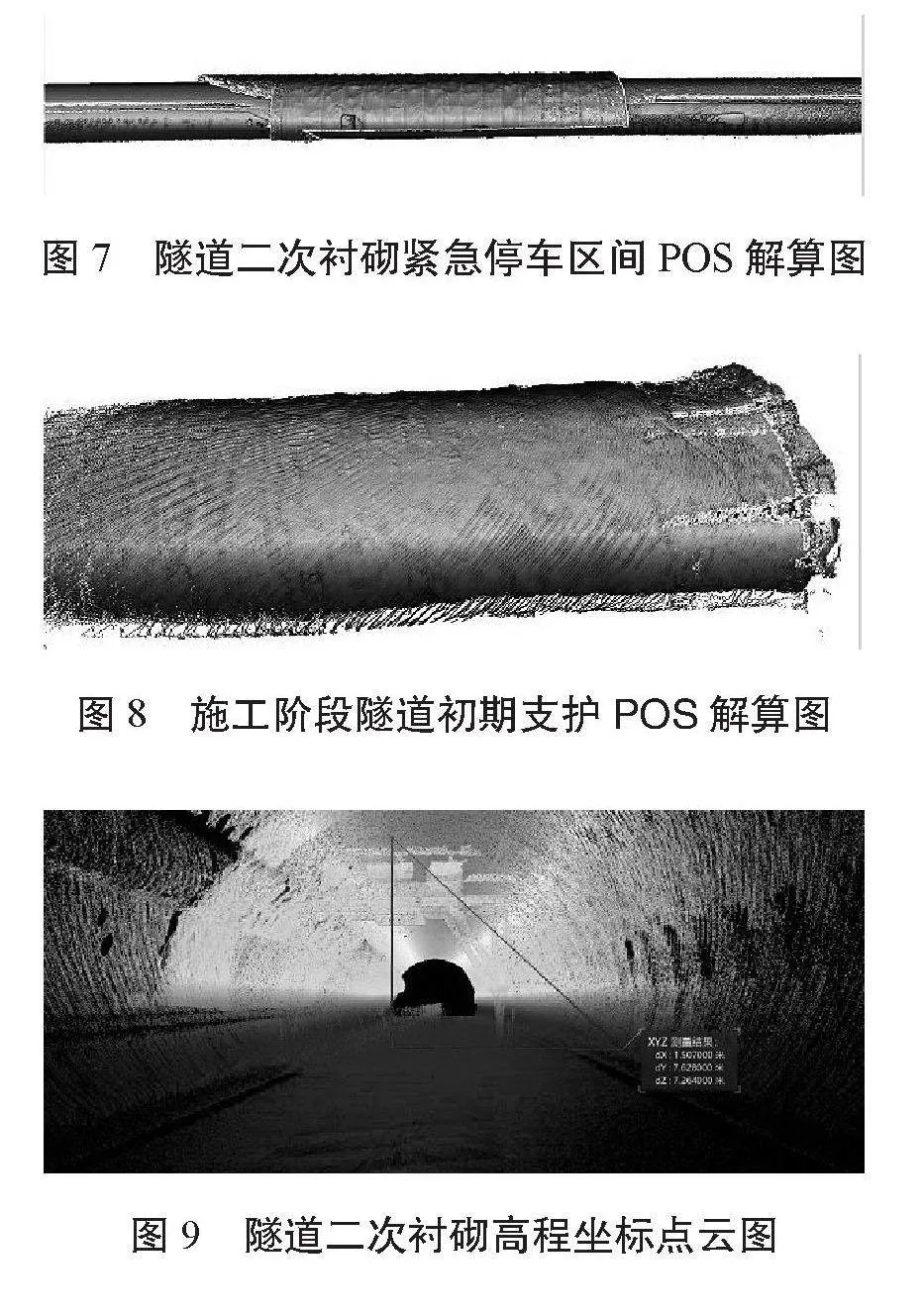
由《大龍山隧道施工圖設計文件》可知,該文研究智能檢測機器人在隧道質量檢測中的應用,隧道二次襯砌高程為7.261 m,初期支護高程7.821 m。如圖7和圖8分別為大龍山1號隧道ZK102+567~ZK102+677和ZK102+358.2~ZK102+439施工段POS解算圖,隨機取樣,示例圖9為隧道二次襯砌高程坐標展示圖,圖9隧道斷面二次襯砌施工高程dZ=7.264 m,高于《大龍山隧道施工圖設計文件》規定3 mm,隧道滿足施工技術規范[12]。
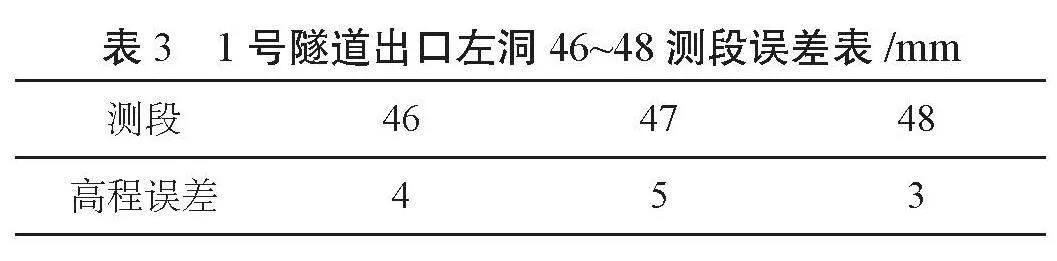
4.3 數據解算精度
由于智能檢測機器人外業作業的優勢,掃描完成后,先利用SLAM GO POST軟件進行POS解算,直接解算得到地方坐標系的點云數據,如表3所示為1號隧道出口左洞46~48測段高程誤差表,采集的點云數據的精度基本等同于全站儀的測量精度,點云整體精度可控制在5 mm內。說明機器人采集的點云數據精度能滿足隧道質量測量的要求。內業數據處理方面,由于SLAM數據無須拼接和坐標轉換,效率比傳統激光雷達掃描儀更高。
綜上,智能檢測機器人的整體作業效率比傳統全站儀、掃描儀要高,整體作業過程更簡便。
4 結語
該研究所采用基于智能檢測機器人和激光雷達掃描的隧道質量檢測技術,能夠準確有效測量出隧道初期支護及二次襯砌的輪廓坐標,該方法首先使智能檢測機器人與電腦手機等設備共聯,再開始掃描隧道內輪廓,獲得點云數據采集,根據隧道點云的空間分布特征、點云的形態和顏色特征通過SLAM GO POST軟件對隧道點云數據進行自動解算,最后得出隧道特征區域的距離和角度信息,整個實驗過程1人即可完成采集,方便高效。實驗結果表明,該研究解算的點云整體精度可控制在5 mm內,總掃描路段5 215 m,總用時244 min,智能檢測機器人的整體作業效率比傳統全站儀、掃描儀要高,整體作業過程更簡便。實現了大面積、高密度的三維點云數據采集,這一創新技術不僅簡化了操作流程,還擴展了應用范圍,為隧道質量檢測提供一種新的數字化技術手段,尤其在隧道內部結構的高效測量中具有獨特優勢。
此外,智能檢測機器人面對隧道無明顯特征情況時,應對措施時間較慢,技術仍需改進。
參考文獻
[1]《中國公路學報》編輯部.中國交通隧道工程學術研究綜述[J].中國公路學報,2022(4): 1-40.
[2]王耀東,蘇廣思,方恩權,等.基于激光雷達的隧道輪廓三維點云重構與形變檢測研究[J].中南大學學報(自然科學版),2024(6):2393-2403.
[3]姜勇,吳佳曄,馬永強,等.沖擊回波聲頻法用于鐵路隧道襯砌質量檢測[J].鐵道建筑,2020(5):6-10.
[4]陳建平.隧道襯砌質量地質雷達檢測影響因素研究[J].西安科技大學學報,2017(2):200-206.
[5]龔彥峰,肖明清,王少鋒,等.鐵路隧道檢測技術現狀及發展趨勢[J].鐵道標準設計,2019(5):93-98.
[6]朱寧寧.三維激光掃描在地鐵隧道形變監測中的應用[J].測繪工程,2015(5):63?68.
[7]王耀東,蘇廣思,方恩權,等.基于激光雷達的隧道輪廓三維點云重構與形變檢測研究[J].中南大學學報(自然科學版),2024(6):2393-2403.
[8]李晉儒,宋成航,林景峰.基于點云數據的隧道曲面三維重建方法的研究[J].城市勘測,2021(6):90-94+99.
[9]Yu Z ,Zhizhong Z ,Wei L , et al.Application of 3D laser scanning on NATM tunnel deformation measurement during construction[J].Acta Geotechnica, 2022(1): 483-494.
[10]Sensor Research; Study Findings on Sensor Research Detailed by Researchers at Capital Normal University (Cross-Section Deformation Analysis and Visualization of Shield Tunnel Based on Mobile Tunnel Monitoring System)[J]. Information Technology Newsweekly, 2020.
[11]Dongfeng J ,Weiping Z ,Yanping L .Systematic Approach for Tunnel Deformation Monitoring with Terrestrial Laser Scanning[J]. Remote Sensing, 2021(17):3519-3519.
[12]公路隧道施工技術規范:JTG/T 3660—2020[S].北京:人民交通出版社,2020.
收稿日期2024-08-24
作者簡介:方平洋(1988—),男,本科,工程師,研究方向:土木工程。
基金項目:中交第三公路工程局有限公司科技研究項目“機器人和數字孿生技術的圍巖穩定性快速分析系統研究”(SGJLGSKY-2024-03)。