自旋翼無人機縱向解耦控制技術研究
2024-08-28 00:00:00王震黃一敏王安航
機械制造與自動化 2024年2期



摘"要:針對對象自旋翼無人機,提出在干擾下如何實現(xiàn)解耦控制。由于對象無人機空中段飛行過程中對外界干擾十分敏感,很容易在干擾下激發(fā)高度和速度間的耦合,現(xiàn)有控制策略優(yōu)先考慮了速度控制,而犧牲了高度控制性能,所以導致高度控制魯棒性較差。針對此特性,提出升降速率指令內回路控制結構以增加系統(tǒng)對高度差的反應能力,并且在槳盤控制通道加入高度反饋以彌補油門控制的不足。通過仿真測試改進策略的解耦性能以及魯棒性,驗證了該策略是合理且可行的。
關鍵詞:自旋翼無人機;高度速度耦合;縱向控制策略
中圖分類號:TP391.9""文獻標志碼:B""文章編號:1671-5276(2024)02-0229-05
Research on Decoupling Strategy of Longitudinal Control of Autogyro UAV
WANG Zhen, HUANG Yimin, WANG Anhang
(College of Automation Engineering,Nanjing University of Aeronautics and Astronautics,Nanjing 211106,China)
Abstract:For autogyro UAV, a strategy to realize decoupling control under interference is explored. Due to the great sensitivity of UAV to external interference in its flight, the coupling between altitude and speed tends to be easily stimulated under interference. The existing control strategies prioritize speed control at the sacrifice of altitude control performance, leading to poor robustness of altitude control. This paper, therefore, proposes an internal loop control structure of speed up and down command to increase the system's response to altitude difference, and height feedback is added to the propeller control channel to make up for the shortage throttle control. The test and simulation on the decoupling performance and robustness of the improved strategy are conducted, which verifies the reasonable ness and feasiblity the strategy.
Keywords:unmanned autogyro;coupling between altitude and velocity;longitudinal control strategy
0"引言
自轉旋翼機(簡稱為自旋翼)是一種以無動力旋翼為主要升力裝置的旋翼飛行器,依靠空氣來流驅動旋翼自轉提供升力[1],其主要操縱包括槳盤縱向傾角、槳盤橫向傾角和方向舵,其外形上與直升機類似,起飛方式與固定翼飛機類似。自旋翼起飛前發(fā)動機處于怠速,此時旋翼為有動力旋翼,依靠發(fā)動機驅動旋轉;達到初始轉速后,斷開旋翼與發(fā)動機間的傳動,發(fā)動機開大油門,通過螺旋槳驅動飛行器向前滑行,飛行器加速并增加旋翼槳盤空氣流量,以此驅動旋翼自轉,提供升力,待克服重力后便可離地。由于其自轉特性,旋翼傳到機身的轉矩很小,不需要額外的轉矩平衡機構[2]。
無人機是當前的研究重點,也是研究難點。自旋翼的無人化面臨著建模置信度高、控制效果差等難題。隨著研究的深入,研究人員已逐步提高了自旋翼無人機的建模置信度,也越來越聚焦于建模與控制中的細節(jié)問題[3]。
自旋翼無人機由于其獨特的氣動構型,使其在控制策略的設計與研究上,不同于傳統(tǒng)的固定翼與直升機控制方案,需要根據(jù)其控制特點制定合適的控制策略。本文主要針對自旋翼無人機縱向段的控制策略展開研究。
1"問題描述
1.1"研究對象及問題描述
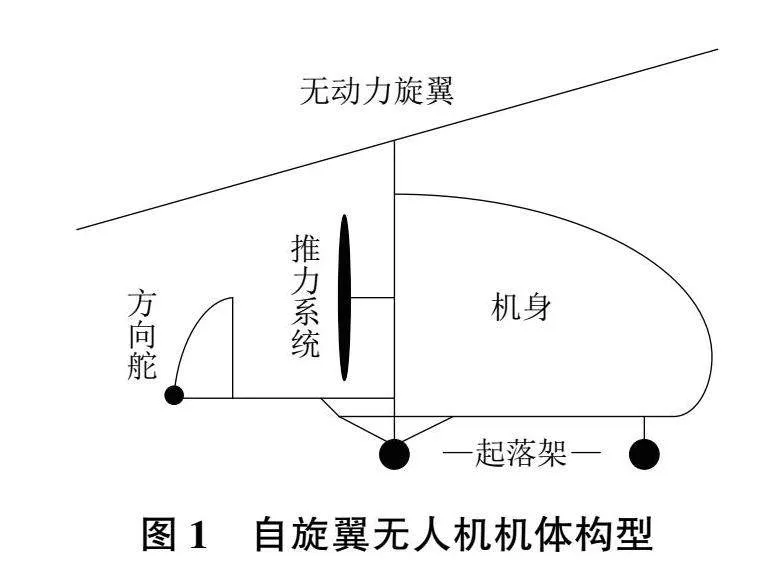
對象自旋翼無人機氣動構型簡單,構成部件包括無動力旋翼、推力系統(tǒng)、機身、方向舵和起落架等,操縱舵面包括:槳盤縱向傾角、槳盤橫向傾角、方向舵和發(fā)動機油門開度。
本文研究的對象無人機為常規(guī)氣動布局,氣動構型如圖1所示,總質量約500kg,設計飛行速度30m/s。
自旋翼無人機縱向操縱響應的耦合現(xiàn)象描述如下:當槳盤縱傾角度不變時,通過油門大小改變飛行速度,導致槳盤平面內進氣量增加,旋翼升力增加使得無人機進行爬升;當槳盤縱向傾角保持不變時,通過槳盤縱傾角度改變飛行高度,必然會使槳盤迎面阻力增加,減小速度[4]。綜上所述,自旋翼無人機縱向操縱通道耦合嚴重,單一操縱量輸入會引起多個狀態(tài)量的變化,故在無人機巡航過程中若同時接入多個縱向狀態(tài)量的控制,則會出現(xiàn)相互耦合的現(xiàn)象,影響控制的品質。
1.2"現(xiàn)有控制策略分析
通過上述描述可知,對象無人機的兩個縱向操縱通道可分別實現(xiàn)對高度和速度的控制,相應也就有兩種控制方案:利用油門控制速度、槳盤縱傾角度控制高度以及利用油門控制高度、槳盤縱傾角度控制速度。油門控速、槳盤縱傾控高的方案與傳統(tǒng)的固定翼無人機控制方案類似,通過仿真發(fā)現(xiàn),此方案難以保證速度控制品質,相應也就難以保證穩(wěn)定的旋翼轉速,且淺下滑段會對高度產(chǎn)生耦合影響,從而影響自旋翼類飛行器的飛行狀態(tài),導致高度和速度之間的耦合影響難以消除[5]。
分析對象無人機線性模型發(fā)現(xiàn),槳盤縱傾角度變化對速度的影響較大,速度對俯仰角變化敏感,故為了保證速度控制的精度,實驗室現(xiàn)有方案采取了利用槳盤縱傾角度控制速度、油門控制高度的方案,保證了速度控制精度,減少了其對高度的耦合影響。但在不確定性環(huán)境干擾下,特別是垂向風干擾,兩者的耦合會加劇,本文將在現(xiàn)有方案上進行改進,減輕耦合影響。
2"特性分析
2.1"操縱耦合特性分析
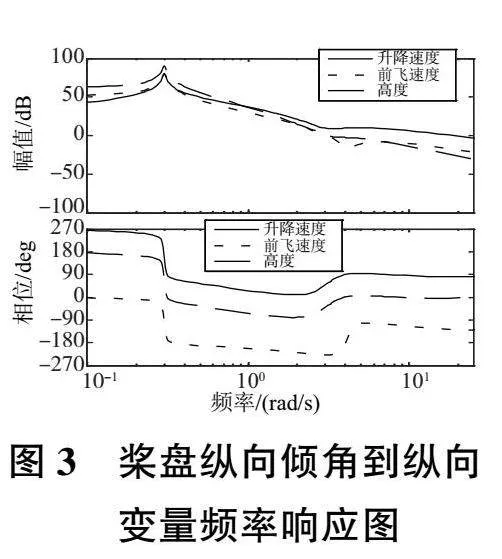
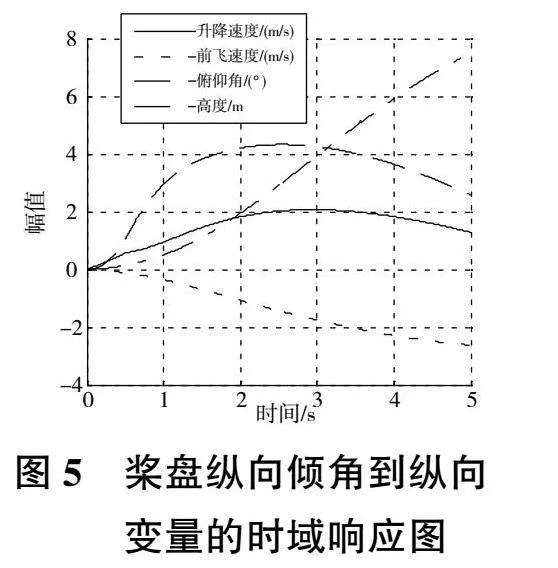
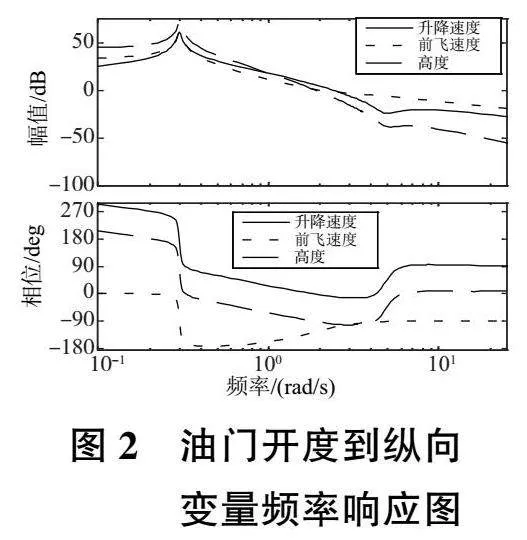
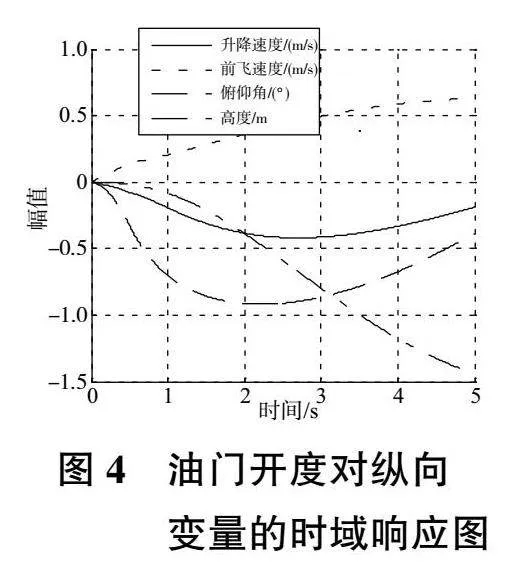
自旋翼無人機共4個操縱輸入量,其中油門開度和槳盤俯仰操縱屬于縱向操縱量,主要影響無人機的前飛速度、高度和升降速度等縱向狀態(tài)。分別單獨操縱油門通道和槳盤縱向通道得頻率響應如圖2—圖5所示。
從頻域響應來看,油門開度在低頻段對4個縱向變量有一定的增益,但普遍較槳盤縱向傾角低,油門通道較槳盤縱向通道響應緩慢,跟蹤性能差。
雖然兩個操縱通道對自旋翼的縱向飛行狀態(tài)均會產(chǎn)生一定的影響,但是兩個操縱通道之間不會產(chǎn)生額外的耦合影響。當油門開度變化時,槳盤縱向傾角作為自旋翼無人機的操縱量輸入,不會因為高度或者速度變化而導致傾角的改變,所以兩個操縱量之間并不存在耦合,而是操縱輸入后,會同時改變飛機某個狀態(tài),使得控制上難以解除操縱量帶來的耦合影響。
2.2"狀態(tài)耦合特性分析
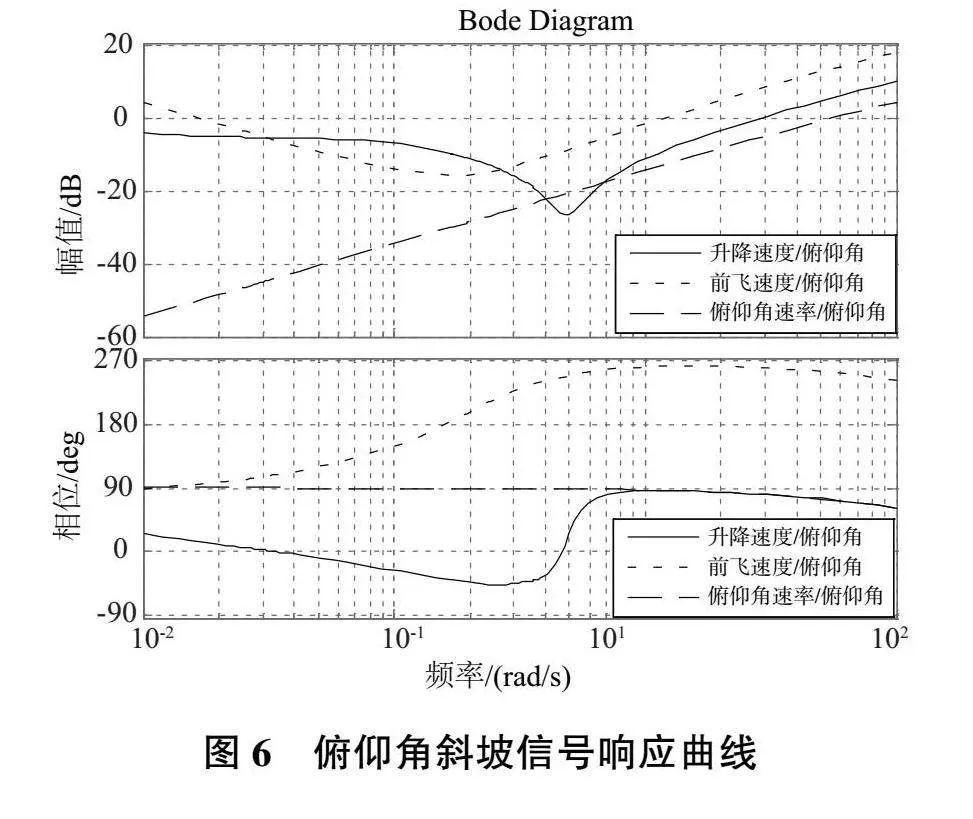
分析縱向狀態(tài)變量俯仰角、升降速度及前向速度之間的頻率特性。俯仰角斜坡信號響應曲線如圖6所示。
從頻率響應圖中可以看出,升降速度、前飛速度、俯仰角之間均存在強耦合,俯仰角對升降速度和前向速度影響較大,尤其是給定俯仰角斜坡信號時,自旋翼機前向速度與升降速度之間存在特定的關系[6]。
機理分析:直接操縱槳盤俯仰傾角會改變旋翼面與機體間的夾角,進而改變來流的入流角度。當入流角度增大時,一方面會使旋翼升力增加,同時改變旋翼拉力在飛行速度方向的分量,使得飛行阻力增加[7],從而減小飛行速度,另一方面,俯仰角增加會減小旋翼拉力在豎直方向上的分量,因此合適的制導策略可以使旋翼機在豎直方向上的分力動態(tài)穩(wěn)定,從而升降速度可以趨于穩(wěn)定,而前向速度逐漸減小。
3"油門控制策略改進
油門控制通道原采用的是高度阻尼內回路的結構,利用升降速率作為微分環(huán)節(jié)來提高系統(tǒng)阻尼,本質結構為高度和升降速率的內外環(huán)并聯(lián)結構。本文調整為基于指令內回路的高度控制方案,實質為高度與升降速率的內外環(huán)串聯(lián)結構,通過控制升降速率達到穩(wěn)定高度目標。下面將介紹其設計過程。
3.1"控制律設計
自旋翼無人機獨特的氣動構型使得槳盤縱向傾角相對于速度和高度的影響均大大高于油門的影響[8],而速度對于保證自旋翼無人機的穩(wěn)定性至關重要。因此不同于固定翼無人機的控制策略,自旋翼無人機采用槳盤控速、油門控高的思路來保障速度控制的優(yōu)先級。
1)控制結構設計
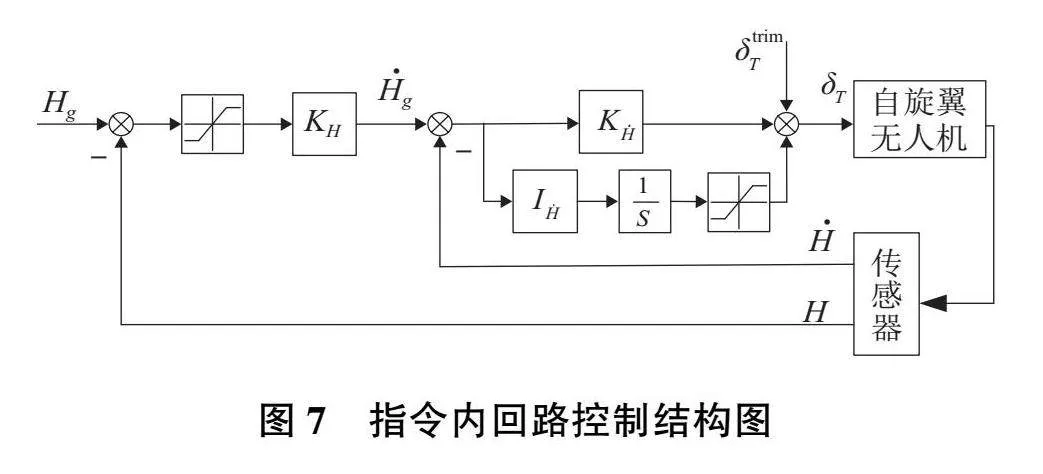
基于下沉率指令內回路的控制律以升降速率為實際參控量,對升降速率進行PI比例積分實現(xiàn)精確跟蹤,而升降速率指令由外環(huán)的高度差生成,其控制律表達式如下所示。
δT=δtrimT+KH·ΔH·+IH·∫ΔH·dt
H·cmd=KHΔH(1)
當實際高度大于指令高度使得高度差變大時,此時的升降速率應當為負值,若實際高度低于指令高度使得高度差變小,此時的升降速率應當為正值,所以指令表達式中系數(shù)應為負相關。控制結構如圖7所示。
2)控制參數(shù)設計——升降速率回路
升降速率控制回路結構比較簡單,是PI控制器串聯(lián)結構,在整個控制參數(shù)設計過程中應當優(yōu)先進行。此時外環(huán)路斷開,控制律表達式僅包括
δT=δtrimT+KH·ΔH·+IH·∫ΔH·dt(2)
根據(jù)上述表達式,需提取油門通道至升降速率的傳遞函數(shù),通過動量法得到的線性模型可以獲得其傳遞函數(shù),其對應的根軌跡以及伯德圖如圖8所示。
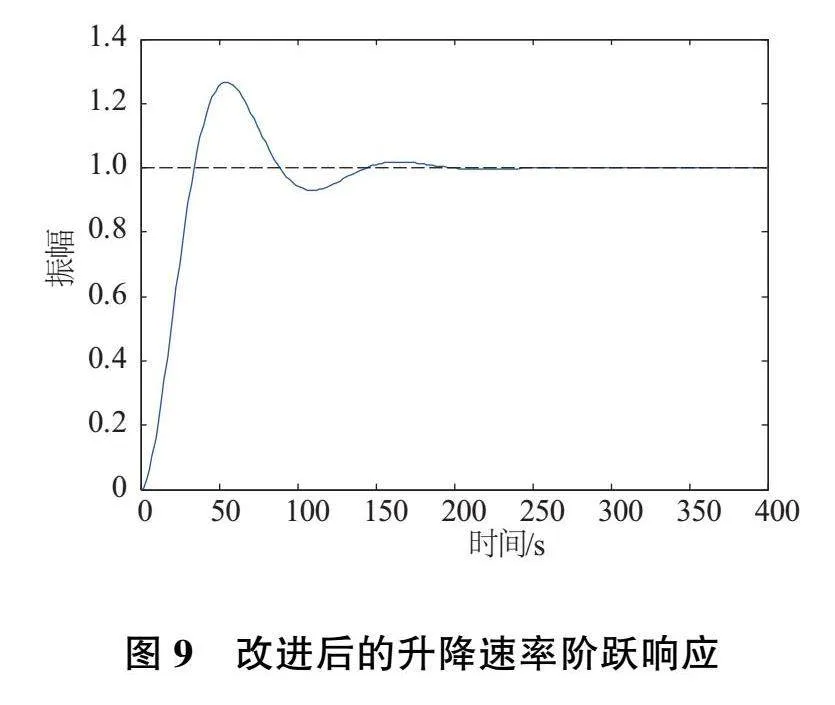
通過根軌跡調節(jié)得到對應的控制系數(shù)KH·=7,IH·=0.2。此控制系數(shù)下的油門至升降速率通道的階躍響應曲線如圖9所示。
經(jīng)過PI控制調節(jié)后,系統(tǒng)的階躍響應整體較好,一方面動態(tài)性能較好,響應較為迅速,另一方面系統(tǒng)穩(wěn)態(tài)誤差幾乎為0,大大減小了系統(tǒng)誤差。
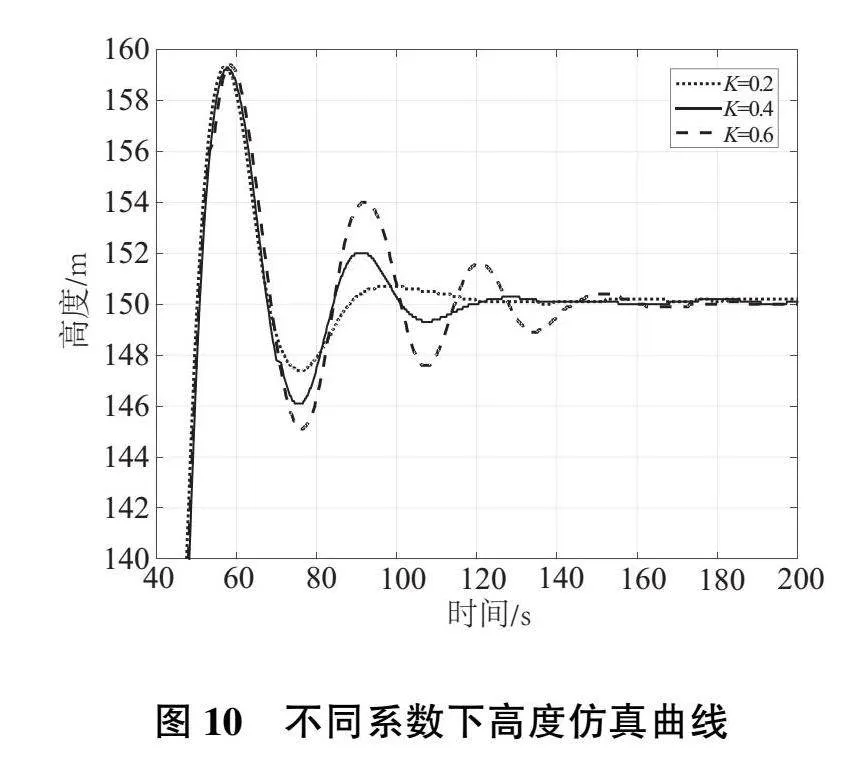
3)控制參數(shù)設計——高度回路
高度回路參數(shù)簡單,可直接通過工程經(jīng)驗法進行整定,在不同的KH下進行仿真實驗,效果如圖10所示。
通過圖10中飛行仿真曲線可以看出,高度外環(huán)參數(shù)選擇0.4相對比較合適,過大會導致高度產(chǎn)生額外的振蕩,過小則會使得動態(tài)響應變差,對高度差變化不夠敏感。
3.2"控制效果驗證
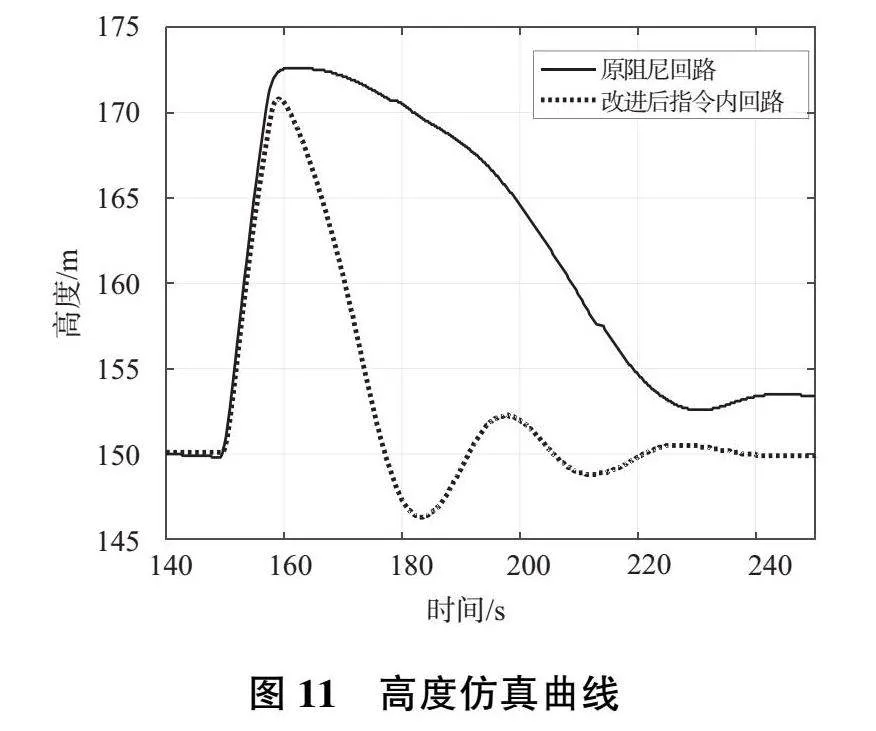
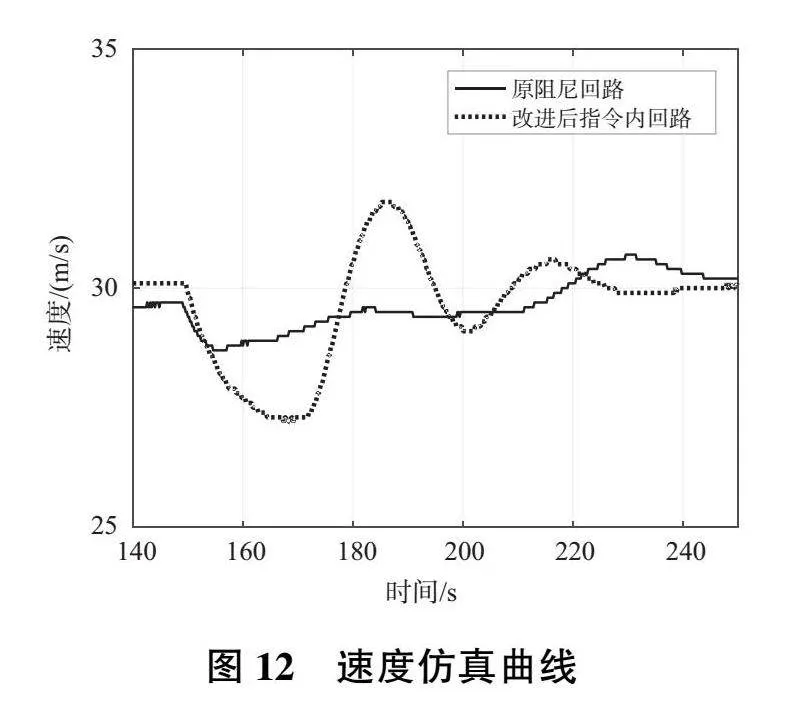
為了驗證控制律改進的效果,本節(jié)主要從垂向風干擾不確定性角度展開測試,分析指令內回路控制結構的魯棒性以及不足。與原控制相比,飛行曲線如圖11、圖12所示。
通過垂向風的測試發(fā)現(xiàn),利用油門通道控制升降速度來穩(wěn)定高度的控制策略,解決了在垂向風帶來較大高度差后難以收斂的問題。在垂向風撤去后,高度能夠迅速收斂,比原控制收斂時間減小了至少40s;但與此同時,高度收斂過程中,兩者的耦合效應有所加劇,具體表現(xiàn)為同一時間下速度出現(xiàn)了約2~4m/s的波動,并且高度收斂至平飛高度附近時,同樣出現(xiàn)了一定的波動。
4"槳盤控制策略改進
利用槳盤縱傾控制前飛速度表現(xiàn)出了較好的魯棒性,速度控制能夠適應較為復雜的飛行環(huán)境。這說明槳盤縱傾通道的控制能力相對較強,鑒于槳盤控制的優(yōu)越性,本節(jié)的思路則是通過將狀態(tài)量反饋到槳盤通道,來協(xié)調平飛過程中出現(xiàn)的耦合影響。
1)狀態(tài)反饋量確定
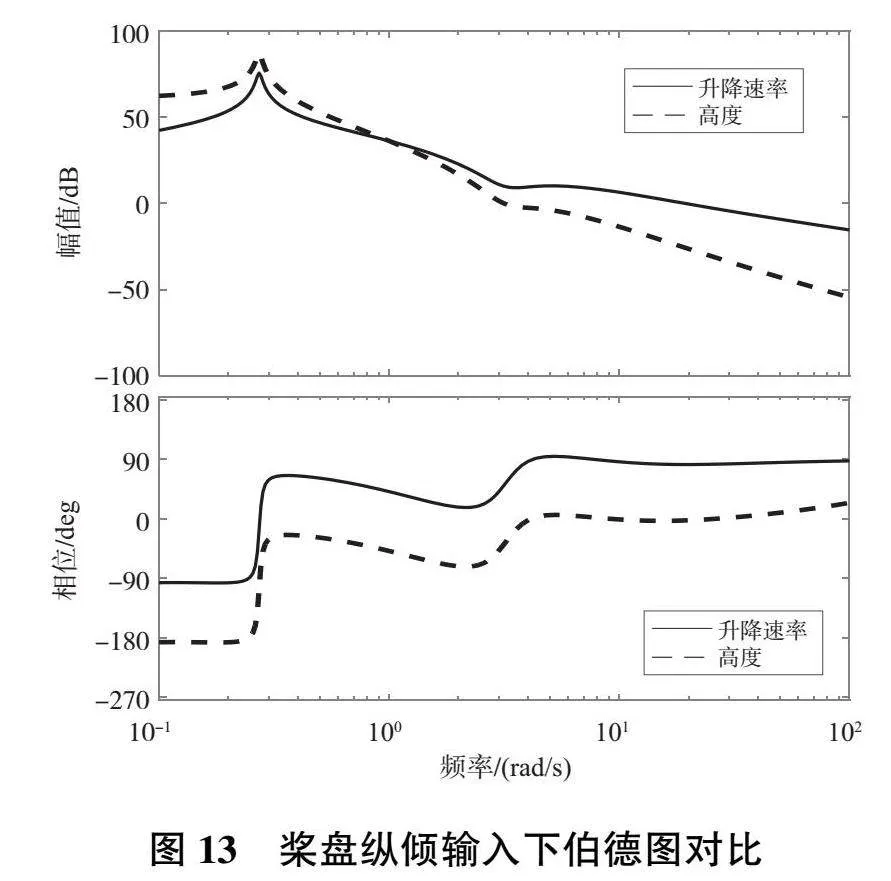
若要采用在槳盤通道加入反饋的改進策略,首先需要解決反饋何種狀態(tài)量。通過此種方案目的是解決高度與速度間的耦合,理論上應當反饋高度,而升降速率也是導致高度變化的原因,故應當存在兩種反饋方案,一種是反饋高度變化,另一種是反饋下沉率變化。槳盤通道輸入下高度和升降速率的伯德圖對比如圖13所示。
通過圖13曲線可以看出,低頻段槳盤通道到高度幅值曲線處于較高的水平,說明槳盤通道對高度與升降速率相比穩(wěn)態(tài)誤差較小,動態(tài)響應的跟蹤精度較高;中頻段兩者差異不大;高頻段中,槳盤縱傾在高度的幅頻曲線中處于較低的水平,說明槳盤縱傾協(xié)調高度能夠有較好的抗干擾能力。
綜上所述,反饋高度差至槳盤控制通道理論上應當比反饋升降速率有更好的效果,下面將按照此思路對槳盤控制策略進行調整。
2)控制律及其參數(shù)設計
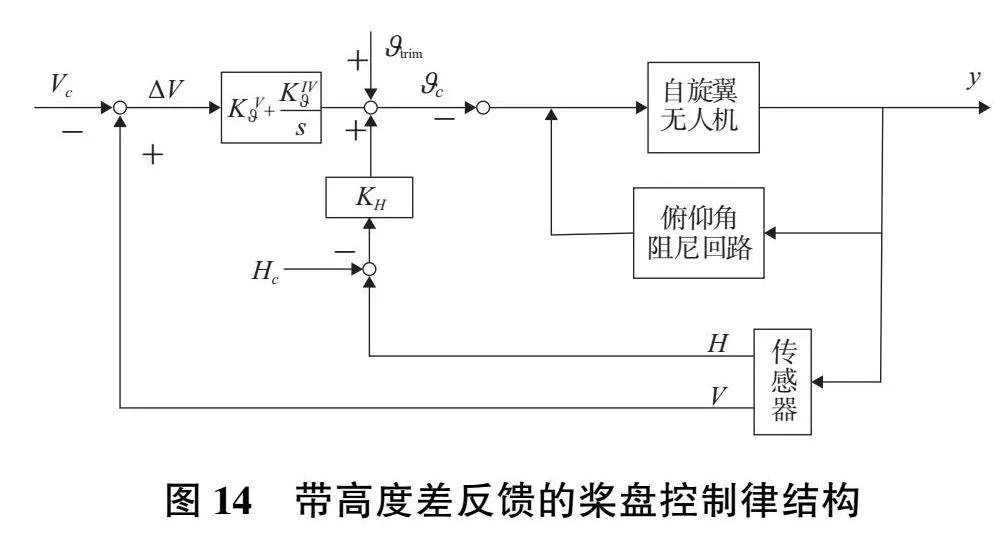
將高度差反饋至槳盤縱傾通道,通過槳盤縱傾來彌補油門控制通道的不足,協(xié)助實現(xiàn)高度的穩(wěn)定,減少其與速度的耦合。加入高度差反饋后的槳盤通道控制律表達式如下。
δe=Ke(-c)+Kωzeωz+δtrime
c=trim+KIV∫ΔVdt+KVΔV+KHΔH(3)
式中KHΔH是加入的高度差反饋項,通過槳盤縱傾調整俯仰角以實現(xiàn)無人機對高度差的反應。控制結構如圖14所示。
此控制方案中,只有一個參數(shù):反饋系數(shù)。由于參數(shù)單一,較為簡單,沒有必要按照控制律設計流程重新設計,且方案改進的目標是解決在飛行過程中外界環(huán)境干擾下的耦合影響,針對性和目的性很強,故可直接用工程經(jīng)驗法進行參數(shù)整定。
工程經(jīng)驗設計主要是通過半物理仿真實驗,通過模擬實際飛行狀況,找出合適的控制系數(shù)。該種方案操作簡單且真實反映飛行過程的動態(tài)特征,更加符合實際應用需求。對象無人機控制的主要難點在于風干擾下難以抑制耦合,所以在使用工程經(jīng)驗法進行參數(shù)整定時,本文創(chuàng)新性地提出了基于風干擾下的參數(shù)整定方法,加入對象無人機較為敏感且難以抵御的外界干擾:垂向風。通過仿真得到的反饋系數(shù)為0.4。
5"仿真驗證
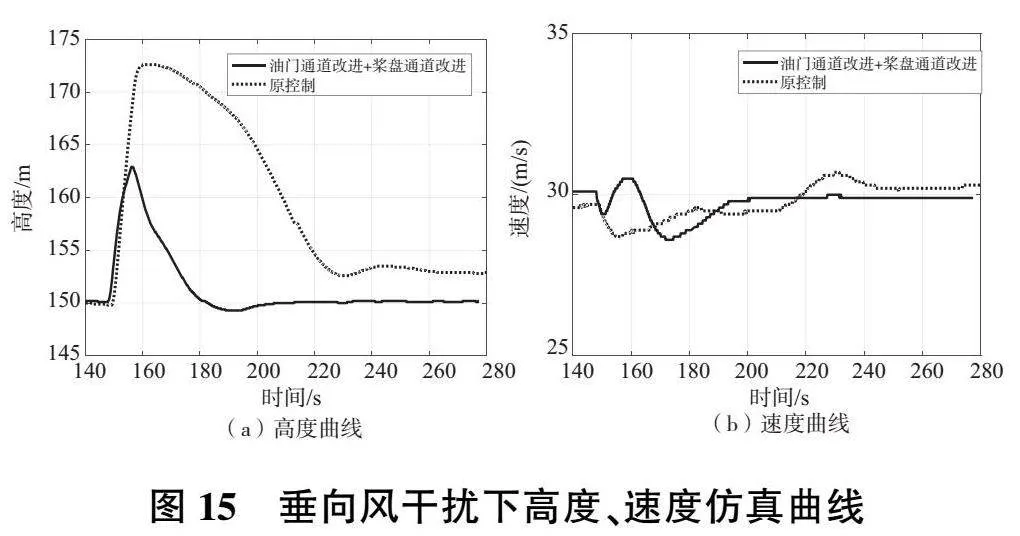
通過對象無人機的非線性6自由度動力學模型進行綜合仿真驗證,針對對象無人機對外界風干擾敏感的特性展開驗證測試,主要是風干擾,同時在實際飛行過程中,還伴隨著燃料消耗帶來的質量質心偏差,可以在仿真中用修改質量質心數(shù)據(jù)來模擬,垂向風干擾下高度、速度仿真曲線如圖15所示。
圖15中實線為改進后的縱向控制策略仿真效果,虛線為原控制策略仿真效果。可以看出,通過控制策略的改進,對象無人機在出現(xiàn)風干擾時,高度和前飛速度的波動情況明顯好轉。動態(tài)響應中垂向風干擾時間段中最大高度差明顯較少,高度收斂時間大大縮短,速度波動整體相對較小,受高度的耦合影響較小。穩(wěn)態(tài)響應中高度和速度基本都不存在靜差,兩者皆很穩(wěn)定。說明控制策略改進效果明顯,能夠大大減少干擾下的耦合影響。
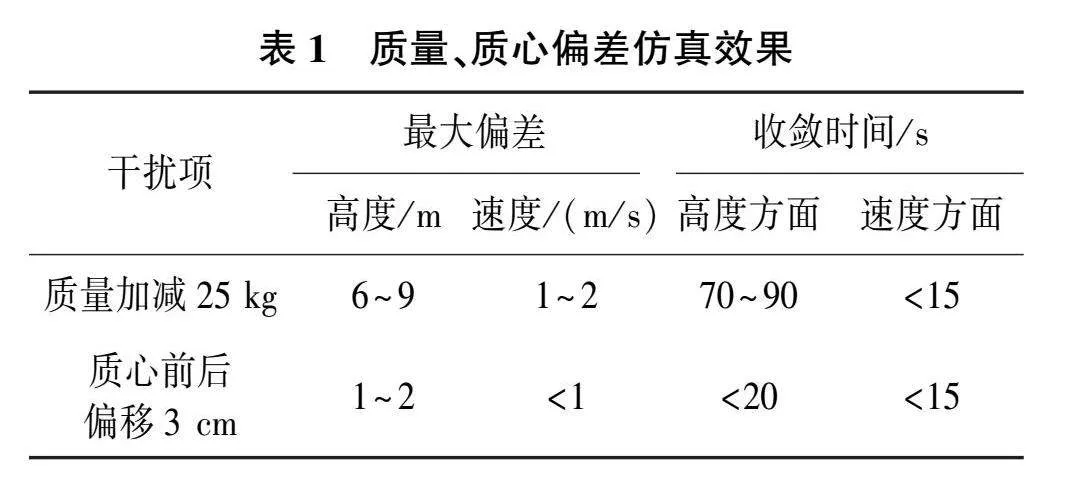
為了進一步驗證控制策略改進后的解耦效果,加入質量、質心偏差,得到的仿真結果見表1所示。
上述仿真數(shù)據(jù)表明,縱向控制策略的改進,一方面對垂向風干擾下產(chǎn)生的耦合有明顯的抑制,與原控制相比性能提升明顯,另一方面在質量、質心偏差的干擾下,表現(xiàn)良好,表明了當前縱向解耦控制策略的合理性以及可行性。
6nbsp;結語
空中巡航段是衡量無人機飛行性能的重要階段,同時也是為后續(xù)著陸段做準備的階段,對自旋翼空中段解耦控制的設計顯得至關重要,因此本文的縱向解耦控制策略起到了承前啟后的作用。
本文根據(jù)對象無人機的耦合特性,針對其在外界干擾下的飛行性能,尤其是風干擾,提出了對兩個縱向控制通道的改進策略,通過油門控制升降速率的指令內回路結構,增加了對象自旋翼機對高度差的敏感度,提高了其抗風性能,并根據(jù)其槳盤縱傾通道控制靈敏性,將高度差反饋到該控制通道上,進一步減少了干擾對高度和速度產(chǎn)生的耦合影響
最后,通過搭建6自由度模型、非線性仿真實驗進行風干擾、質量質心等干擾測試,仿真結果驗證了當前解耦策略具有一定的魯棒性,提高了無人機空中段的飛行性能。
在實際的應用中,需要具體分析自旋翼機的敏感特性,找出耦合較為嚴重或者干擾下易發(fā)散的狀態(tài),將其作為反饋量反饋到操縱通道,并對比不同控制結構的效果,從而設計合適的解耦策略。
參考文獻:
[1] 李鵬程. 無人自轉旋翼機自動著陸控制技術研究[D]. 南京:南京航空航天大學,2019.
[2] 姬天田. 自轉旋翼無人機仿地飛行控制系統(tǒng)研究[D]. 太原:中北大學,2020.
[3] 程曉倩. 無人自轉旋翼機建模與控制技術研究[D]. 廈門:廈門大學,2017.
[4] 林清,蔡志浩,閆坤,等. 俯仰操縱方式對自轉旋翼機操穩(wěn)特性的影響[J]. 北京航空航天大學學報,2016,42(11):2454-2465.
[5] 邢煒烽. 自轉旋翼機關鍵技術的分析與研究[D]. 南京:南京理工大學,2020.
[6] 王俊超,李建波,韓東. 自轉旋翼機飛行性能理論建模技術[J]. 航空學報,2014,35(12):3244-3253.
[7] LEISHMAN J G. Development of the autogiro:a technical perspective[J]. Journal of Aircraft,2004,41(4):765-781.
[8] PAW Y C. Synthesis and validation of flight control for UAV[D]. Minneapolis:University of Minnesota,2009.
收稿日期:20221014
