基于機器視覺的小型自動穿串機給進器同步控制技術
2024-08-28 00:00:00呂曉冬黨玉東
機械制造與自動化 2024年2期
關鍵詞:機器視覺


摘"要:給進器是穿串機的關鍵硬件。針對控制難度較大的問題,研究一種基于機器視覺的小型自動穿串機給進器同步控制技術。分析穿串機給進器結構,構建機器視覺(攝像機)內、外參數模型,標定攝像機空間位置;采集給進器視覺圖像,應用Roberts算子細化處理給進器視覺圖像;基于PID原理設計模糊控制器,計算得到給進器同步控制模糊輸出結果,完成肉塊的自動穿串同步控制。實驗數據表明:在不同實驗工況下,應用提出技術獲得的給進器同步控制時延最小值為2 s,穿串成功率最大值為96%。給進器同步控制時延較短,穿串成功率較高,控制效果更佳,進一步提升工作效率。
關鍵詞:機器視覺;同步控制;小型自動穿串機;給進器;模糊控制器;控制時延
中圖分類號:TS972.21""文獻標志碼:B""文章編號:1671-5276(2024)02-0247-05
Synchronous Control Technology of Small Automatic Threading Machine Feeder Based on Machine Vision
LYU Xiaodong,DANG Yudong
( Nanyang City Product Quality Inspection and Testing Center,Nanyang 473004,China)
Abstract:Feeder, the key hardware of threading machine, is difficult to control. To overcome the difficulty, a machine vision based synchronization control technology for small automatic threading machine feeder is studied. The feed structure of threading machine is analyzed, the internal and external parameter models of machine vision (camera) are built, and the spatial position of the camera is calibrated. The visual image of the feeder is aquired and Roberts operator is applied to refine the visual image of the feeder. Based on PID principle, a fuzzy controller is designed, and the fuzzy output of feeder synchronization control is calculated to complete the automatic threading synchronization control of meat. The experimental data show that under different experimental conditions, the minimum value of feeder synchronization control delay obtained by the proposed technology is 2 s, and the maximum value of threading success rate is 96%. The synchronous control delay of the feeder is short, the threading success rate is high, and the control effect is better, which further improves work efficiency.
Keywords:machine vision;synchronous control;small automatic threading machine;feeder;fuzzy controller system;control delay
0"引言
燒烤風味獨特,是中國夏季盛行美食之一,是多人聚會休閑的主要方式,受到了人們的青睞[1]。近幾年,經營方式的增加與改變,使得燒烤行業得到了大力的發展,肉串需求量暴增,供不應求現象頻發。傳統穿串技術需要大量的人工與時間,很難實現肉串的大批量生產,無法滿足夏季燒烤行業的需求,加深了肉串供給與需求的矛盾。另外,傳統肉串加工方式還存在著食品衛生安全性難保障、工作人員工作強度大等缺陷,需要對其進行改革與升級。為了克服上述缺陷,小型自動穿串機應運而生,其主要由氣缸(肉與插簽)、置簽箱、計數光控裝置、穿簽連架桿、插簽推板、轉簽皮帶、傳感器、給進器等構成,可以實現肉串的自動定位、停止、穿串、補簽等功能,具備操作方便、全自動化、高生產效率等優勢,不但能夠提升肉串的生產效率,還能夠解放勞動力,對燒烤行業的發展具有至關重要的作用[2]。
給進器是小型自動穿串機的關鍵器件,其是否能夠穩定作業直接關系著小型自動穿串機的整體性能。如果給進器控制失誤,就有可能造成肉串無簽、多簽等現象的發生,使得生產的肉串無法直接使用,降低肉串生產效率,進而影響肉串的供給能力。為了避免上述現象的發生,對基于機器視覺的小型自動穿串機給進器同步控制技術進行研究,期望通過機器視覺的應用,提升小型自動穿串給進器的控制效果,為燒烤行業的發展提供有力的保障。
1"小型自動穿串機給進器同步控制技術研究
1.1"小型自動穿串機給進器結構分析
為了更好地同步控制給進器,首要任務就是依據小型自動穿串機的整體特點,深入地分析小型自動穿串機給進器結構,為后續機器視覺標定奠定堅實的基礎[3]。
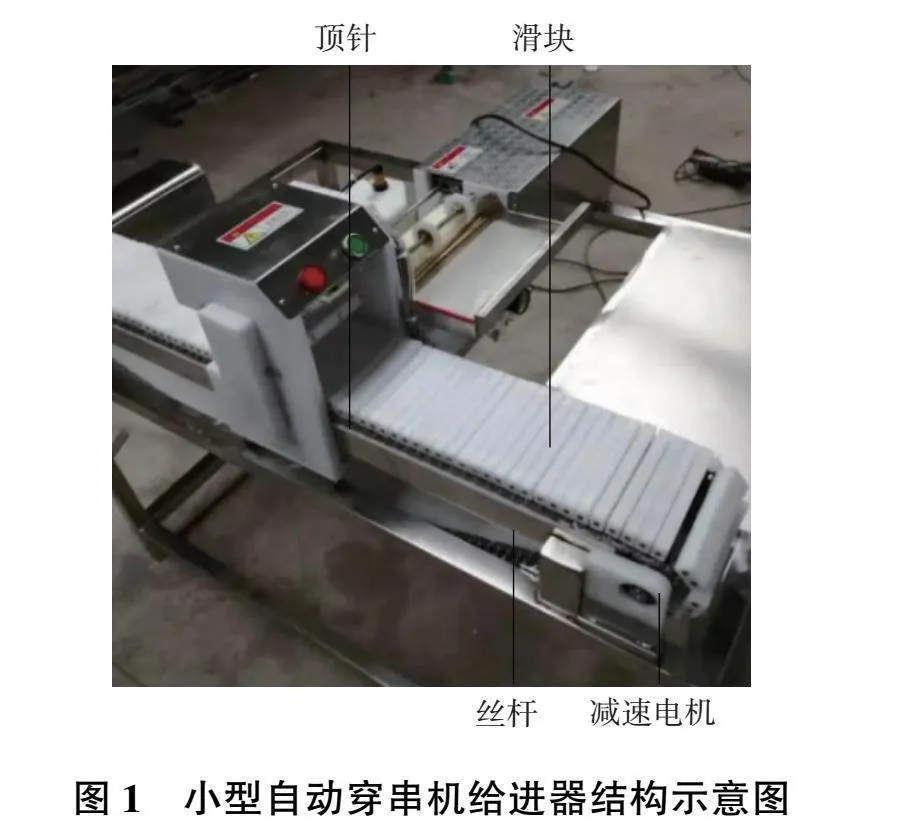
小型自動穿串機給進器結構如圖1所示。給進器主要由減速電機、絲桿、頂針、滑塊等構成,內部還有滑軌、螺紋法蘭等部件,共同實現肉塊、簽子的給進操作。
減速電機采用直流電機,電源電壓為12V,通過絲桿傳動,從而帶動螺紋法蘭進行肉塊給進運動。滑塊與光軸利用焊接方式進行連接,共同形成竹簽給進部件——頂針[4]。
1.2"機器視覺標定
機器視覺是指利用機器代替人眼對目標進行測量與判斷。此研究引入機器視覺系統獲取給進器圖像,單純靠圖像無法獲取給進器的實際坐標信息,故需要對機器視覺進行標定,依據給進器圖像坐標系與攝影機坐標系之間的關系,確定給進器目標物體的實際坐標信息,為給進器同步控制的實現做好充足的準備[5]。
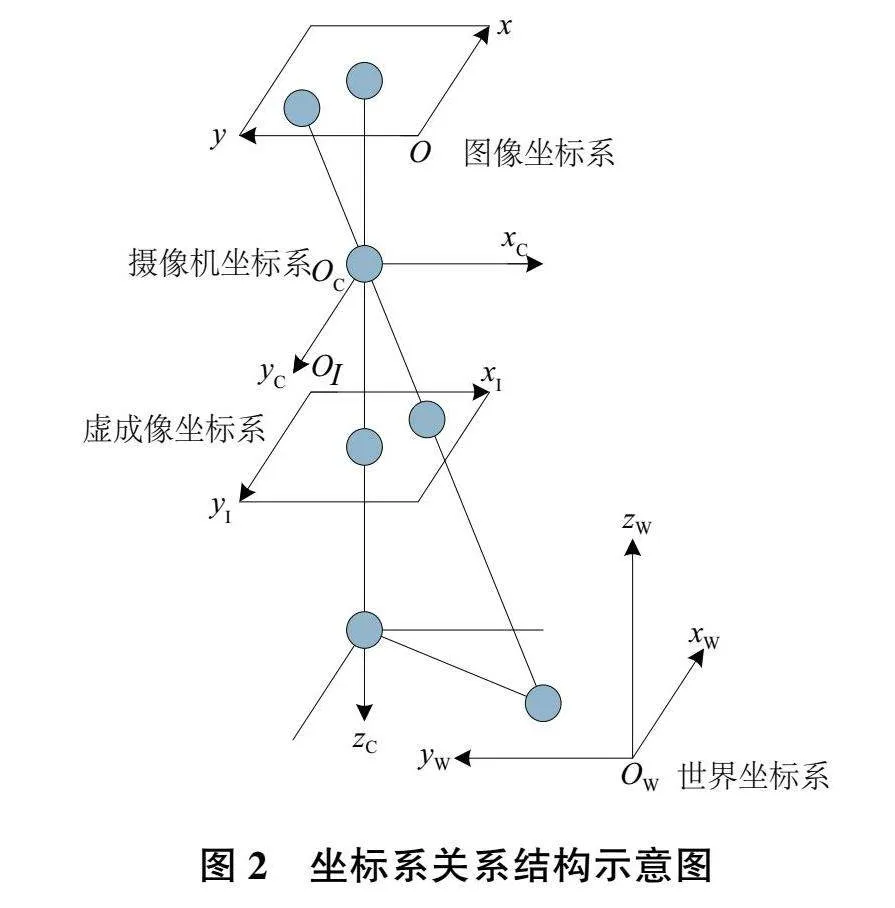
機器視覺標定實質上就是攝像機設備標定,其主要依據為內參數模型與外參數模型。在攝像機參數模型構建之前,建立攝像機坐標系、世界坐標系、圖像坐標系與虛成像坐標系之間的關系結構,具體如圖2所示。
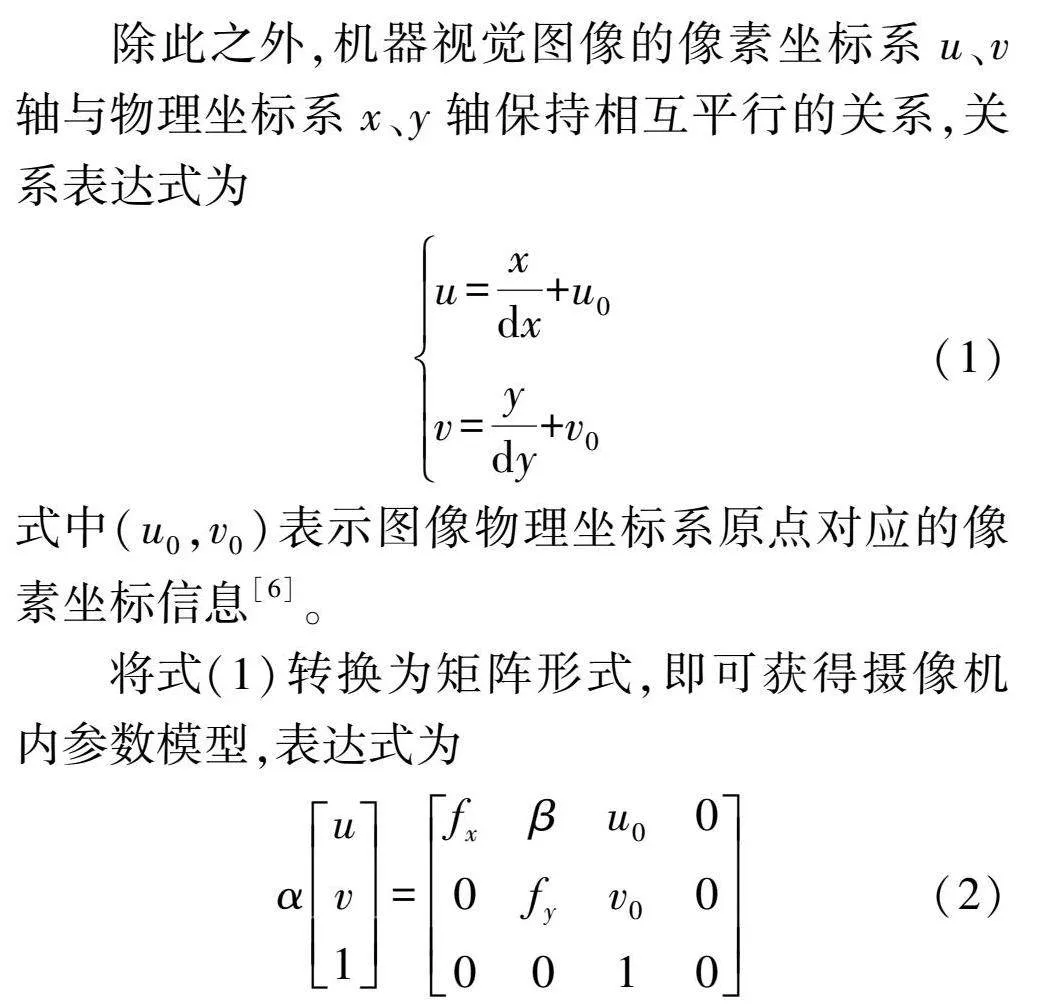
除此之外,機器視覺圖像的像素坐標系u、v軸與物理坐標系x、y軸保持相互平行的關系,關系表達式為
u=xdx+u0
v=ydy+v0(1)
式中(u0,v0)表示圖像物理坐標系原點對應的像素坐標信息[6]。
將式(1)轉換為矩陣形式,即可獲得攝像機內參數模型,表達式為
αuv1=fxβu000fyv000010(2)
式中:α表示設定的比例因子;fx與fy分別表示u、v方向有效焦距的尺度因子;β表示圖像坐標軸的扭曲系數。
攝像機外參數模型主要是通過視覺圖像像素坐標系與內參數模型之間的關聯獲得,表達式為
Sm=ARW→CTM(3)
式中:Sm表示攝像機外參數模型;A表示輔助參量矩陣;RW→C表示世界坐標系與攝像機坐標系兩者的旋轉矩陣;T表示平移向量;M表示標定板參量矩陣。
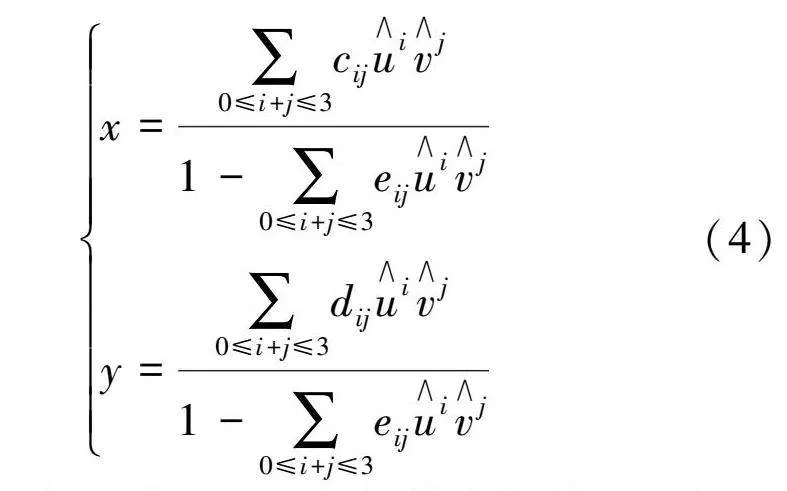
依據上述確定的攝像機內參數、外參數模型,結合小型自動穿串機給進器同步控制需求,將畸變系數考慮在內,實現攝像機的最終標定[7]。設定給進器目標物體無畸變圖像坐標系為(u∧,v∧),其在攝像機坐標系中的坐標信息表示為
x=∑0≤i+j≤3ciju∧iv∧j1-∑0≤i+j≤3eiju∧iv∧jy=∑0≤i+j≤3diju∧iv∧j1-∑0≤i+j≤3eiju∧iv∧j(4)
式中:(x,y)表示給進器目標物體在攝像機坐標系中的坐標信息;i與j表示圖像坐標像素編碼;cij與dij分別表示橫坐標與縱坐標轉換因子;eij表示坐標信息轉換的誤差因子。
上述過程完成了機器視覺系統(攝像機)的標定,為后續給進器視覺圖像的獲取與處理提供幫助。
1.3"給進器視覺圖像獲取與處理
以上述標定后的機器視覺系統(攝像機)為基礎,采集給進器視覺圖像,并對其進行一定的預處理,確定給進器目標物體位置信息,為后續給進器同步控制的實現提供依據[8]。
攝像機在同一時刻能夠獲取一張給進器視覺圖像,視覺圖像的質量會受到光照背景、空間位置、攝影機自身參數等多種因素的影響,從而導致給進器視覺圖像存在著噪點,為給進器目標物體位置信息的確定帶來阻礙與困難[9]。
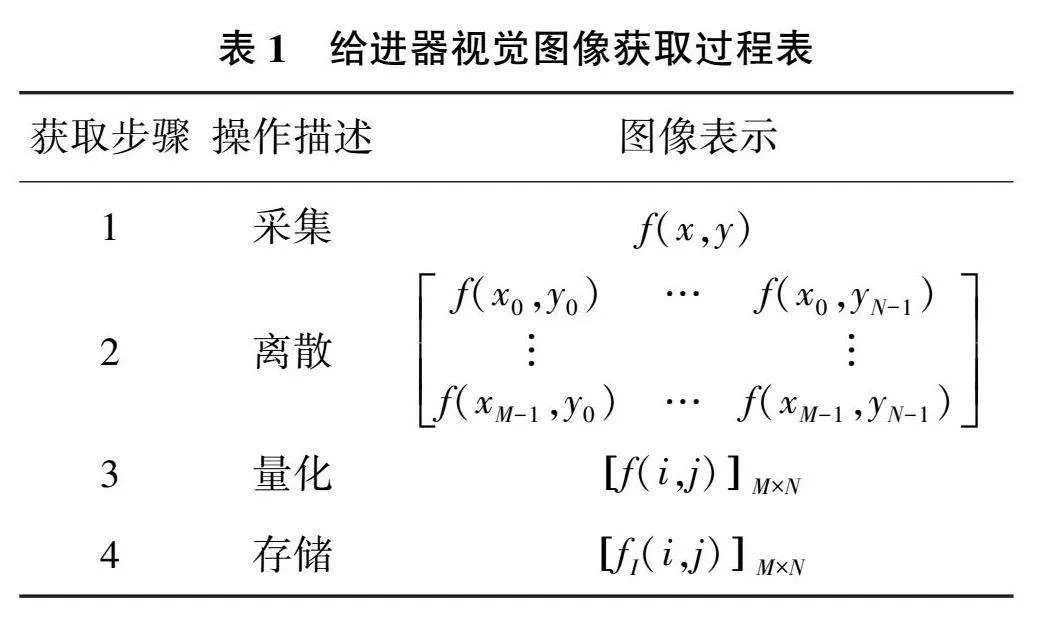
給進器視覺圖像獲取過程如表1所示。
如表1所示,機器視覺系統在圖像獲取過程中,首先獲得目標物體位置連續的模擬圖像,經過離散操作獲得單一的視覺圖像,通過采樣量化將其轉化為二維矩陣形式(數字圖像)進行存儲,即可完成給進器視覺圖像的獲取[10]。
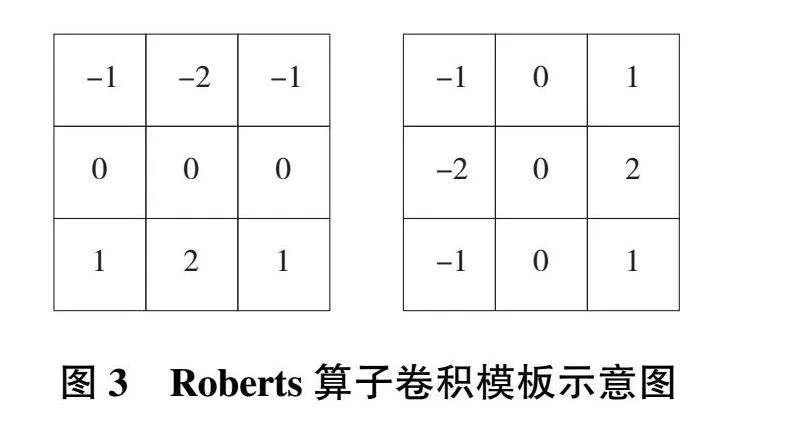
此研究選取Roberts算子對給進器視覺圖像進行處理,在不影響圖像質量的基礎上,細化視覺圖像的細節,方便后續給進器目標物體位置信息的確定[11]。Roberts算子卷積模板如圖3所示。
Roberts算子細化處理視覺圖像的計算公式為
gI(i,j)={[fI(i,j)-fI(i+1,j+1)]2+
[fI(i+1,j)-(fI(i,j+1))]2}1/2(5)
式中gI(i,j)表示經過Roberts算子處理后的給進器視覺圖像。
上述過程完成了給進器視覺圖像的獲取與處理,為最終給進器的同步控制提供數據依據。
1.4"給進器同步控制實現
以上述處理后的給進器視覺圖像為依據,基于PID原理設計模糊控制器,應用模糊控制器即可實現給進器的同步控制[12]。
設定給進器目標物體位置偏差變化范圍為[-xe,xe],其對應的模糊集合論域為E={-n,-n+1,…,0,…,n-1,n}。給進器目標物體位置偏差變化率的模糊集合論域為EC={-m,-m+1,…,0,…,m-1,m},同步控制量的模糊集合論域為K={-l,-l+1,…,0,…,l-1,l}[13]。
為了方便研究的進行,對給進器目標物體位置偏差及其變化率進行量化處理,獲取相應的量化因子,計算公式為
χE=nxe
χEC=mxe(6)
式中χE與χEC分別表示給進器目標物體位置偏差及其變化率的量化因子[14]。
在模糊PID控制過程中,同步控制參數為δp、δI與δd,模糊同步控制推理規則如表2所示。
如表2所示,NB代表負大、NS代表負小、ZO代表0、PS代表正小,PB代表正大。上述模糊同步控制語言是根據量化因子實際情況進行制定的[15]。
為了獲得精確的給進器同步控制量,選取適當的隸屬度函數,應用重心法計算模糊輸出結果,計算公式為
Δδ=∑z1∈ZA(z1)z1∑z1∈ZA(z1)(7)
式中:Δδ表示模糊輸出結果;z1表示輸出集合的元素;Z表示模糊集合對應論域;A表示輸出模糊集合。
將式(7)計算結果輸入到設計的模糊控制器中,控制器會編成相應的控制指令,使得小型自動穿串機給進器進行準確地作業,完成肉塊的自動穿串功能,即實現了小型自動穿串機給進器的同步控制,為小型自動穿串機的應用與發展提供有力的幫助[16]。
2"實驗與結果分析
2.1"實驗準備階段
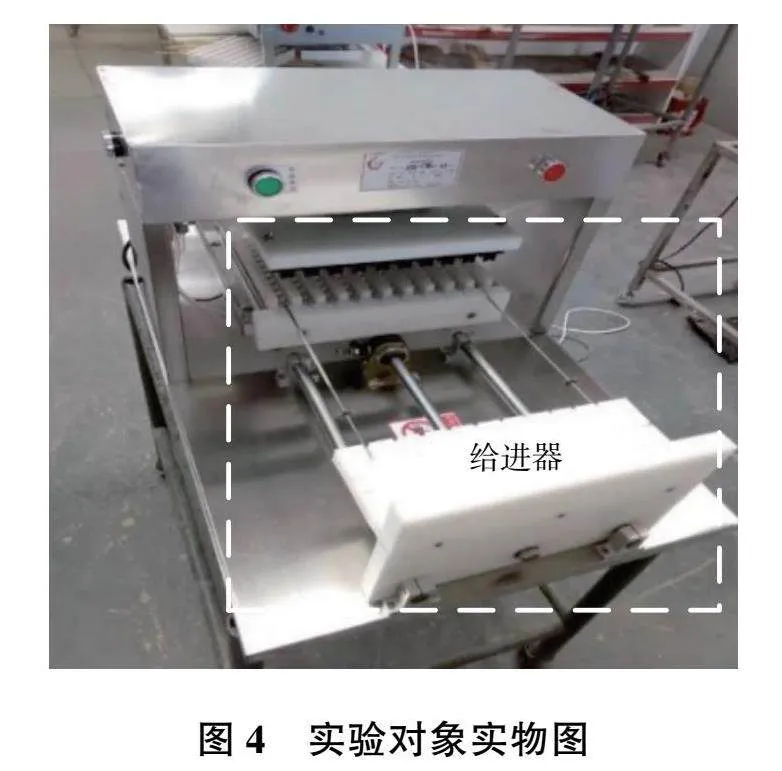
為了驗證提出技術的應用性能,設計小型自動穿串機給進器同步控制實驗。選取某型號小型自動穿串機的給進器作為實驗對象,其實物如圖4所示。
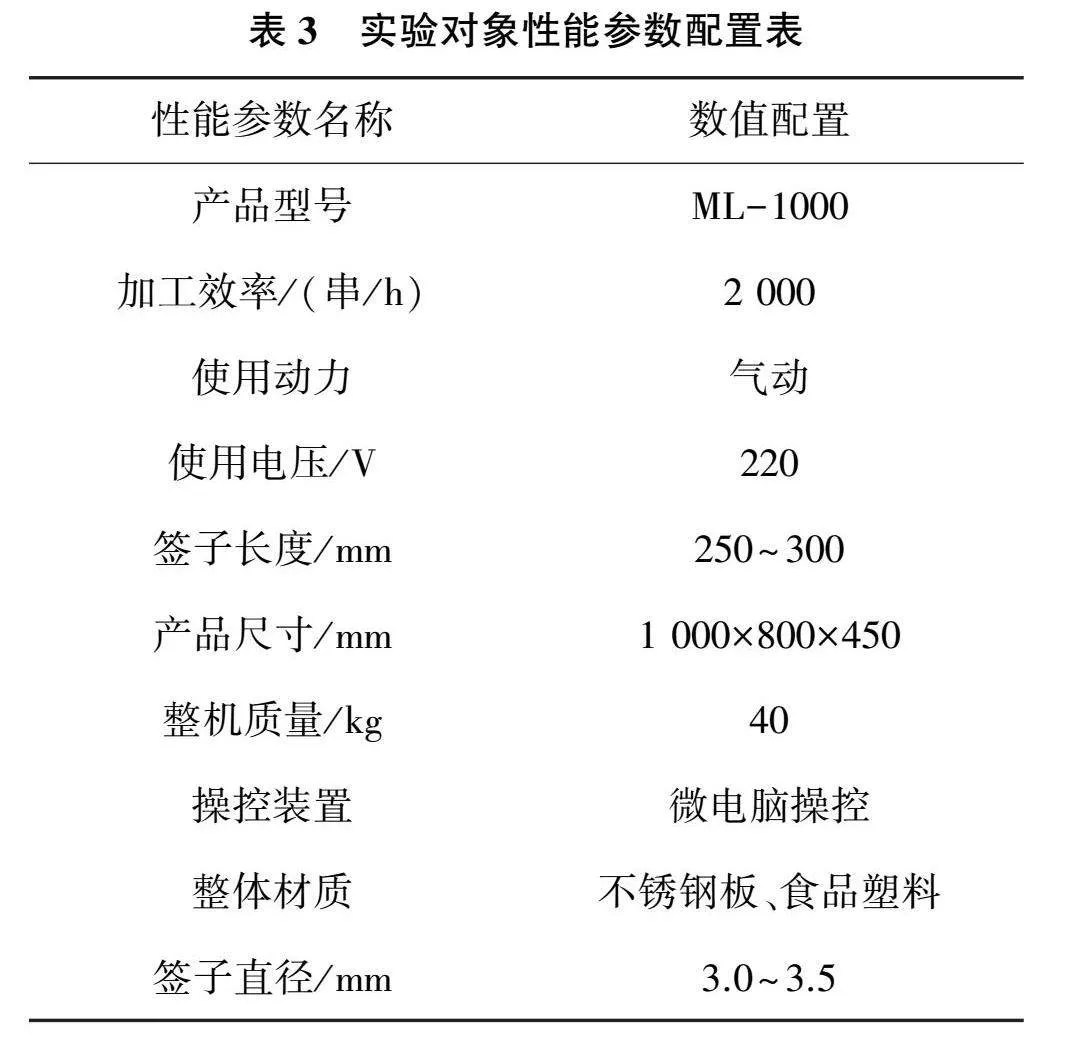
實驗對象性能參數也是影響實驗結果的關鍵因素,故需要依據實驗需求對性能參數進行適當地配置,具體參數如表3所示。
實驗設備選取也是實驗順利進行的關鍵環節。由于應用機器視覺系統獲取給進器視覺圖像,因此在實驗準備階段,選取適當的機器視覺系統設備。
數據來源為該小型自動穿串機的3個月歷史數據,將其分為10種工況,進行編號為:
1)肉串長短不可調整;
2)掉肉塊;
3)竹簽規格不一致;
4)單一氣動傳動;
5)單一電動傳動;
6)氣動傳動與電動傳動結合;
7)感應式穿簽10cm以下;
8)感應式穿簽10cm~35cm;
9)推力大小不均;
10)機器搖晃。
除了工況不同之外,其余變量均保持一致,以此進行給進器同步控制時延與穿串成功率分析。
2.2"實驗結果分析
依據上述實驗準備內容,進行小型自動穿串機給進器同步控制實驗。為了直觀顯示提出技術的應用性能,選取給進器同步控制時延與穿串成功率作為評價指標,具體實驗結果分析過程如下。
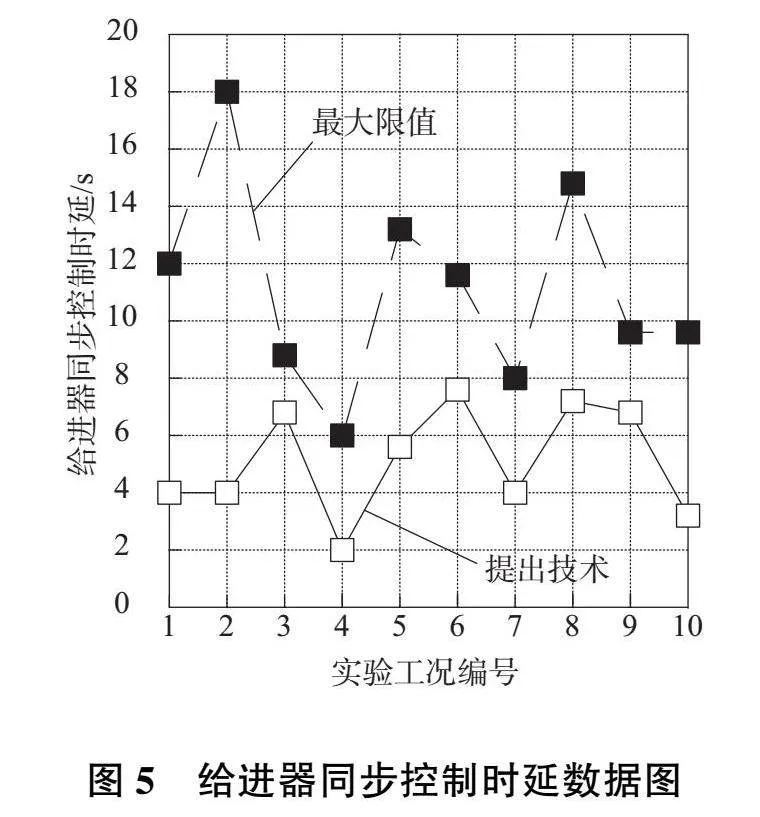
1)給進器同步控制時延分析
給進器同步控制時延反映著同步控制技術的操作效率。常規情況下,給進器同步控制時延越短,表明同步控制技術操作效率越高;反之,則表明效率低。
通過實驗獲得給進器同步控制時延數據如圖5所示。由圖5可知,在不同實驗工況下,應用提出技術獲得的給進器同步控制時延均低于給定的最大限值,最小值達到了2s。這是因為該方法反復設定了比例因子,動態匹配實際坐標信息,可以及時確定給進器目標物體的實際坐標信息,保證頂針控制的同步性,增加了控制效率。
2)穿串成功率分析
穿串成功率反映著同步控制技術的控制精度。常規情況下,穿串成功率越高,表明同步控制技術的控制精度越好;反之,則表明控制精度差。
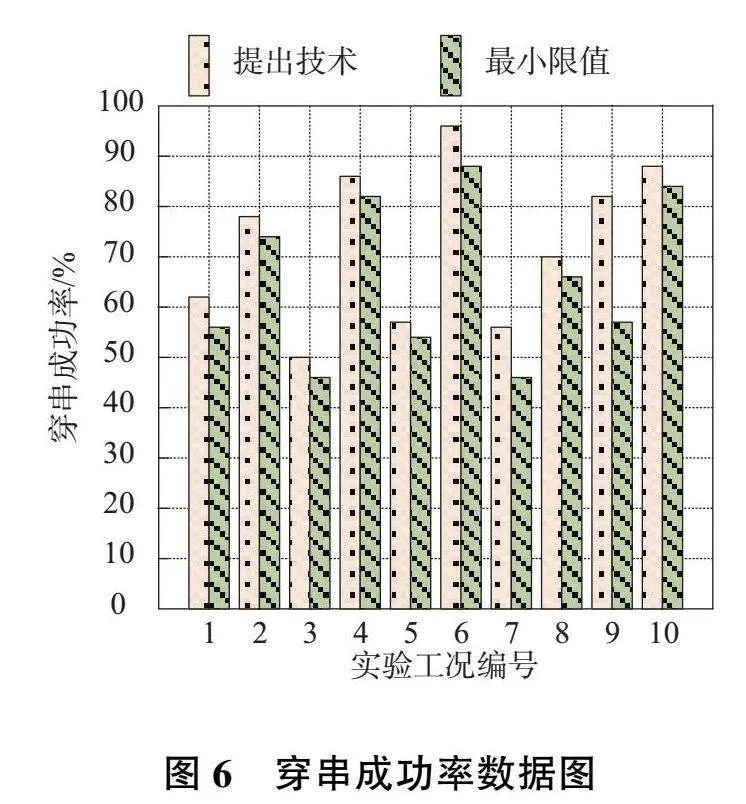
通過實驗獲得穿串成功率數據如圖6所示。
如圖6數據所示,在不同實驗工況下,應用提出技術獲得的穿串成功率均高于給定的最小限值,最大值達到了96%,穿串成功率較高。這是因為其考慮了畸變系數,及時更正坐標信息轉換的誤差因子,在無畸變圖像坐標系的作用下,給進器可以智能定位目標位置,保證了控制效果。
3"結語
小型自動穿串機是現今燒烤行業應用極為廣泛的設備,能夠有效促進燒烤行業的發展。但是,給進器控制難度較大,使得穿串成功率無法滿足燒烤行業需求。因此,引入機器視覺并提出了新的小型自動穿串機給進器同步控制技術,縮短了給進器同步控制時延,提升了穿串成功率,為小型自動穿串機的發展與應用提供助力,也為給進器控制相關研究提供參考。
參考文獻:
[1] 王立軍,張拓,劉光偉,等. 基于機器視覺技術的高壓斷路器機械特性診斷[J]. 高電壓技術,2020,46(6):2148-2154.
[2] 劉杰榮,王偉冠,何其淼,等. 蛙跳式充電的無人機自主巡線技術與系統(二):基于機器視覺的自動充電控制[J]. 電力科學與技術學報,2021,36(6):182-188.
[3] 程偉,王磊,胡建華,等. 基于機器視覺技術的乏燃料貯存格架自動定位試驗方法研究與應用[J]. 核動力工程,2020,41(6):198-201.
[4] 陳夢遲,黃文君,張陽陽,等. 基于機器視覺的工業儀表識別技術研究[J]. 控制工程,2020,27(11):1995-2001.
[5] 任永強,潘浩,李廣濤. 基于機器視覺的軸承字符識別技術的研究[J]. 機床與液壓,2020,48(5):11-14.
[6] 王成軍,韋志文,嚴晨. 基于機器視覺技術的分揀機器人研究綜述[J]. 科學技術與工程,2022,22(3):893-902.
[7] 唐媛紅,劉月云. 基于機器視覺的采摘機器人分揀控制研究[J]. 農機化研究,2021,43(11):216-220.
[8] 林寧. 基于機器視覺技術的電梯曳引輪磨損檢測研究[J]. 微特電機,2022,50(3):26-30.
[9] 黃林彬,辛煥海,鞠平,等. 電力電子并網裝備的同步穩定分析與統一同步控制結構[J]. 電力自動化設備,2020,40(9):10-25.
[10] 程國棟,吳瑋. 礦井帶式輸送機多電動機同步控制技術[J]. 工礦自動化,2021,47(12):81-86,127.
[11] 胡祺,付立軍,馬凡,等. 弱電網下基于鎖相控制并網變換器小擾動同步穩定分析[J]. 中國電機工程學報,2021,41(1):98-108.
[12] 仰玲芳,馬俊鵬,劉天琪,等. 弱電網下單相并網逆變器自同步控制策略[J]. 電力電子技術,2021,55(12):127-129,133.
[13] 楊世剛, 段君艷, 辛社黨. 西門子運動控制器多軸同步控制在尖軌鍛造系統中的應用[J]. 機械設計, 2021, 38(增刊1):256-259.
[14] 蔣德松,王榮杰,王亦春,等. 自動同步離合器恒阻尼控制方法[J]. 哈爾濱工程大學學報,2020,41(4):519-524.
[15] 王士賢,李軍毅,張斌. 欺騙攻擊環境下具有執行器故障的跳變耦合信息物理系統的同步控制[J]. 控制理論與應用,2020,37(4):863-870.
[16] 李海燕,李靜,方登建,等. 基于神經網絡有限時間觀測器的激光混沌系統同步控制研究[J]. 海軍工程大學學報,2020,32(4):86-91.
收稿日期:20221020
猜你喜歡
軟件導刊(2016年11期)2016-12-22 21:52:17
電腦知識與技術(2016年28期)2016-12-21 12:13:14
科技視界(2016年26期)2016-12-17 17:31:58
科技視界(2016年25期)2016-11-25 19:53:52
科技視界(2016年25期)2016-11-25 09:27:34
科教導刊(2016年25期)2016-11-15 17:53:37
軟件工程(2016年8期)2016-10-25 15:55:22
科技視界(2016年20期)2016-09-29 11:11:40
科技視界(2016年6期)2016-07-12 09:12:40
科技視界(2016年15期)2016-06-30 19:03:30
