組合動力原型機吸氣爬升段縱向控制器設計
2024-08-28 00:00:00牧童黃一敏王浩鑫
機械制造與自動化 2024年2期


摘"要:針對飛行器的飛行特點和自身的氣動結構,建立復雜的非線性數學模型,進行靜穩定性和模態特性的分析。為解決高超聲速飛行器在吸氣爬升段縱向的姿態角抖動問題,提出控制系統在吸氣爬升段要使得對象飛行器保持低動態特性的理念。設計基于角速率阻尼內回路的縱向控制律,從時域、頻域兩個方面進行分析,并進行不確定性仿真,驗證了其魯棒性,最終得出阻尼內回路適用于對象無人機吸氣爬升段縱向控制的結論。
關鍵詞:吸氣爬升段;高超聲速飛行器;低動態;阻尼內回路
中圖分類號:V412.4""文獻標志碼:B""文章編號:1671-5276(2024)02-0252-06
Longitudinal Controller Design for Climb Phase of Combined-cycle Vehicle
MU Tong,HUANG Yimin,WANG Haoxin
(College of Automation Engineering,Nanjing University of Aeronautics and Astronautics,Nanjing 211106,China)
Abstract:According to the flight characteristics of the aircraft and its own aerodynamic structure, a complex nonlinear mathematical model is established, and the static stability and modal characteristics are analyzed. To cope with the longitudinal attitude angle jitter of hypersonic vehicle in inspiratory climb phase, the idea that the control system should keep the target vehicle low dynamic characteristics in the inspiratory climb phase is proposed. The longitudinal control law based on angular rate damping inner loop is designed and analyzed from time domain and frequency domain, and its robustness is verified by uncertainty simulation. The final conclusion is that the damping inner loop is suitable for the longitudinal control of the object UAV in the suction climb phase.
Keywords:climb phase;hypersonic vehicle;low dynamic characteristics;damping inner loop
0"引言
組合動力原型機采用水平滑跑起飛方式從機場起飛,到達安全高度后進入吸氣爬升段。在吸氣爬升段,組合動力發動機工作為吸氣模態,以空氣中的氧氣作為助燃劑,消耗攜帶的燃料提供動力,發動機的推力大小和方向不可控。
因此,對象飛行器在吸氣爬升段縱向控制具有其獨特的控制難點。首先需要保證其進氣,從而保證吸氣爬升段的動力安全,因此要保證迎角等姿態角在約束范圍之內;其次對象組合動力飛行器吸氣爬升段需要以較大的速度穿過大氣密度大的空域,因此其動壓變化大的同時高度變化也大。由于飛行時間較長,其燃料的消耗大,致使飛行器質心位置變化較大。因此需要分析對象飛行器吸氣爬升段升阻比特性、縱向靜穩定性和操穩特性等氣動特性,并針對性地設計出合適的控制回路以保證其吸氣爬升段的穩定飛行。
本文將首先分析對象飛行器吸氣爬升段的推力特性、升阻比特性和操穩特性,揭示控制難點后采用對比指令內回路和阻尼內回路兩種增穩回路方式,研究探討適合對象飛行器吸氣爬升段的縱向控制方案。
1"建模與對象特性分析
1.1"對象特性建模
組合動力原型機氣動構型和舵面較為復雜,且其飛行時間較長,燃料消耗較大,質心位置、質量等變化較大;組合動力飛行器吸氣爬升段飛行包線大,速度、高度變化劇烈,因此動壓變化也較大,其氣動特性變化較大。建立高精度的非線性六自由度模型是對其進行控制和仿真的基礎。在考慮大氣環境、地球自轉影響的同時結合飛行器的氣動數據、推力數據和質量數據,實時解算飛行器合力和合力矩,得到飛行器的實時姿態和位置信息,最終實現置信度較高的吸氣爬升段全過程仿真。
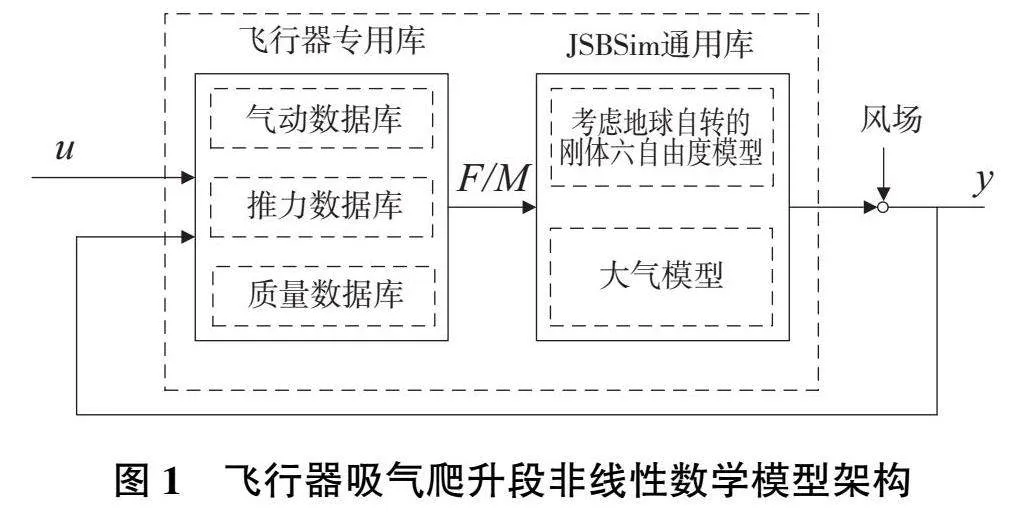
本實驗室在飛行器建模軟件方面持續開發,現已經形成了一套成熟的通用化建模軟件。圖1給出了組合動力飛行器基于該軟件仿真的建模結構圖。其中u表示氣動舵面的輸入量,F和M表示需要計算氣動數據和推力產生的所有力和力矩,y表示輸出量,主要是飛行器的位置和姿態角信息[1]。
1.2"靜穩定性及模態分析
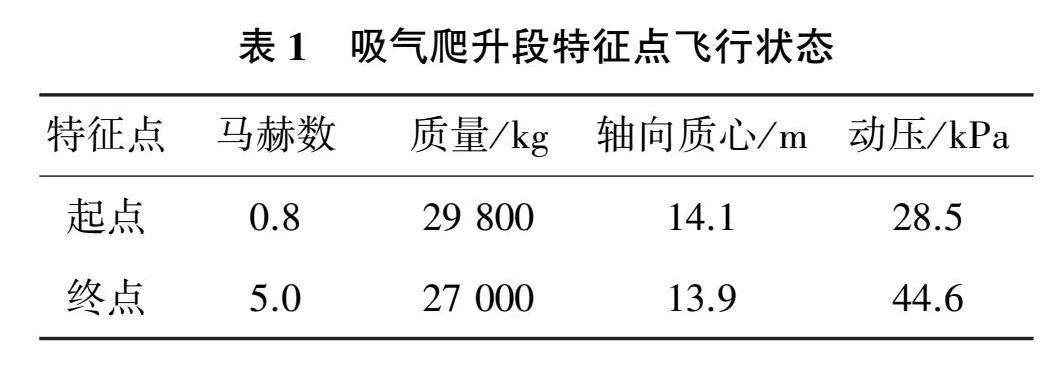
吸氣爬升段組合動力飛行器從海拔 1.1km、0.8Ma 開始,飛行到海拔 25km、5.0Ma 結束。飛行速度從 240m/s 增大到 1 500m/s,動壓參數變化大,氣動特性變化劇烈。此階段發動機工作于吸氣渦輪模態,為保證發動機進氣,飛行迎角必須約束在[-6°,6°]范圍內,消耗燃料約 3 t,占全部質量的10%,質量質心變化也較大。具體如表1所示。因此,對對象飛行器吸氣爬升段的氣動特性分析必不可少。
飛行器的縱向靜穩定性指的是飛行器對縱向姿態擾動的抗擾能力,即縱向姿態受擾后回到平衡狀態的能力,一般以俯仰靜穩定性導數Cmα表示:
Cmα=(x-cg-x-ac)CLα(1)
式中:α為迎角;CL為升力系數,x-cg和x-ac分別表示飛行器質心、氣動焦點在平均氣動弦長上的相對位置,兩者的計算公式如式(2)所示。
x-cg=xcg/c-
x-ac=xac/c-(2)
當Cmα<0時,飛行器的質心在氣動焦點之前,在這種情況下,飛行器是縱向靜穩定的,反之飛行器縱向靜不穩定,且Cmα越大,相應的靜穩定和靜不穩定程度越大。升降舵的偏轉并不會影響飛行器靜穩定性,只會影響其俯仰力矩大小[2]。
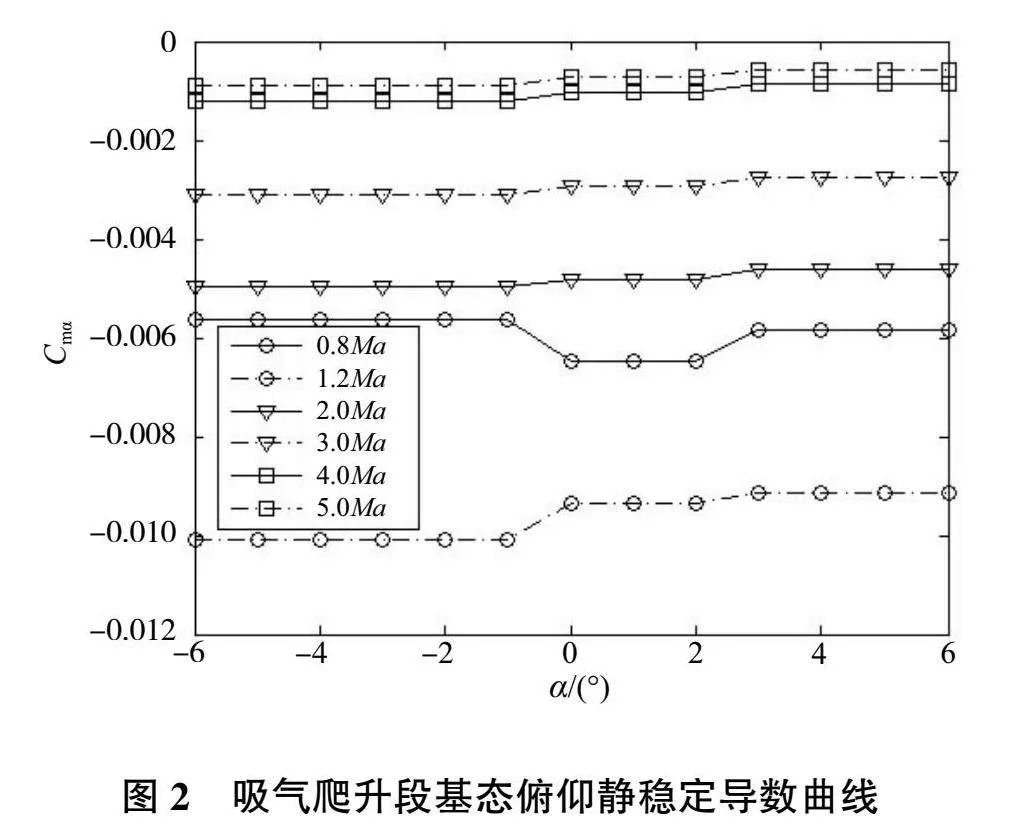
圖2給出了對象飛行器吸氣爬升段在不同馬赫數下的基態俯仰靜穩定性導數Cmα隨迎角變化的曲線。根據上述分析可以知道,整個吸氣爬升段飛行器都俯仰靜穩定,其靜穩定程度隨馬赫數的增加先增大后減小,變化的轉折出現在跨音速階段,在末端隨著馬赫數接近5Ma,俯仰靜穩定性越來越差。
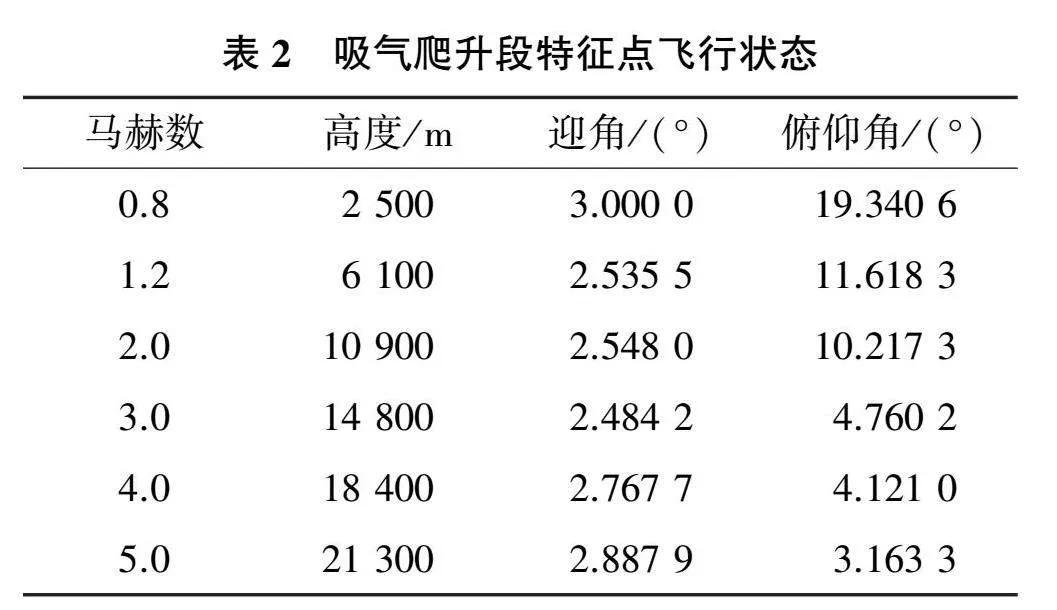
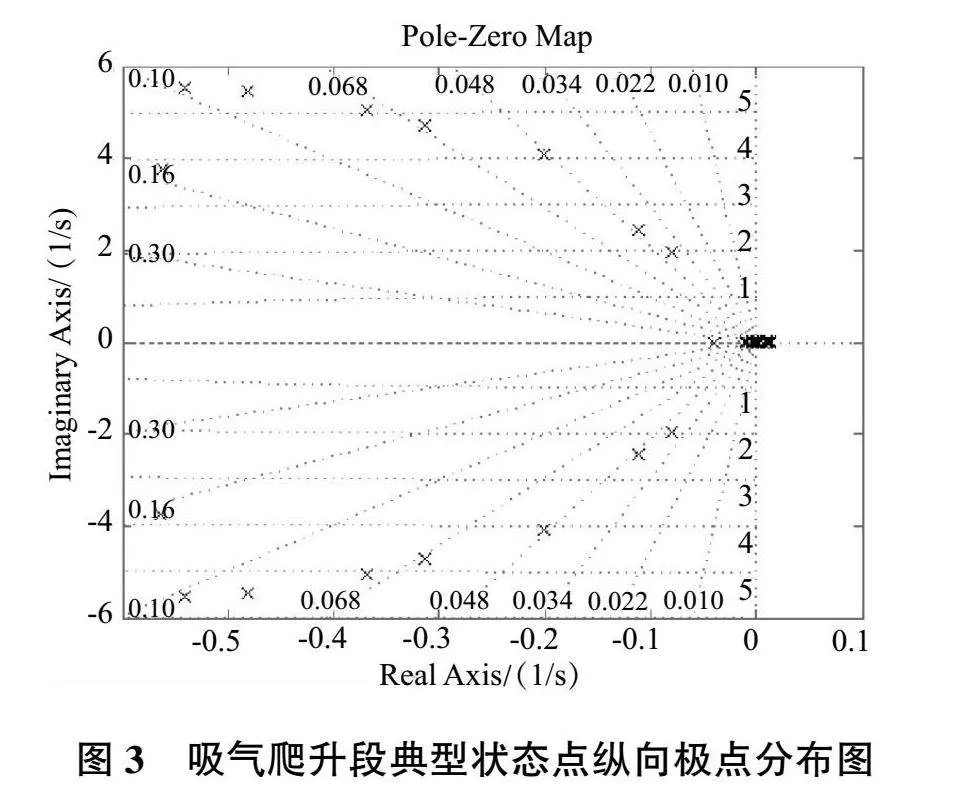
飛行器的動態特性主要體現在模態特性上,飛行器的縱向模態由短周期模態和長周期模態組成,分別對應縱向運動狀態方程的短周期極點和長周期極點。表2是吸氣爬升段特征點對應的飛行狀態。
設計控制律時主要考慮飛行器的短周期運動模態,圖3直觀給出了吸氣爬升段對象飛行器典型狀態點的縱向極點分布圖。
可以看出在選取的狀態點中,短周期極點均位于S平面左半平面,由此可以較為直觀地看出該飛行器在吸氣爬升段處于縱向靜穩定的狀態。對象飛行器在跨音速狀態下,其自然頻率從3.81rad/s增大到5.54rad/s,進入超音速狀態后,其自然頻率持續減小,直到減小至1.96rad/s,因此對象飛行器跨音速時響應速度較快,隨著速度的增加,其響應速度逐漸變慢。
2"不同控制律結構下的仿真對比
2.1"基于俯仰角速率指令內回路的俯仰角控制律
俯仰角速率反饋到升降舵會增大縱向阻力力矩,俯仰角速率積分反饋能增加縱向靜穩定力矩,兩者同時作用便可將位于右半平面的不穩定極點拉回左半平面,將縱向快速發散的模態變成振蕩收斂[3-6]。俯仰角速率指令信號由俯仰角偏差產生,其控制律如下式所示。
δe=Kω,zωz+KI∫(ωz-ωzc)dt
ωzc=K(-c)(3)
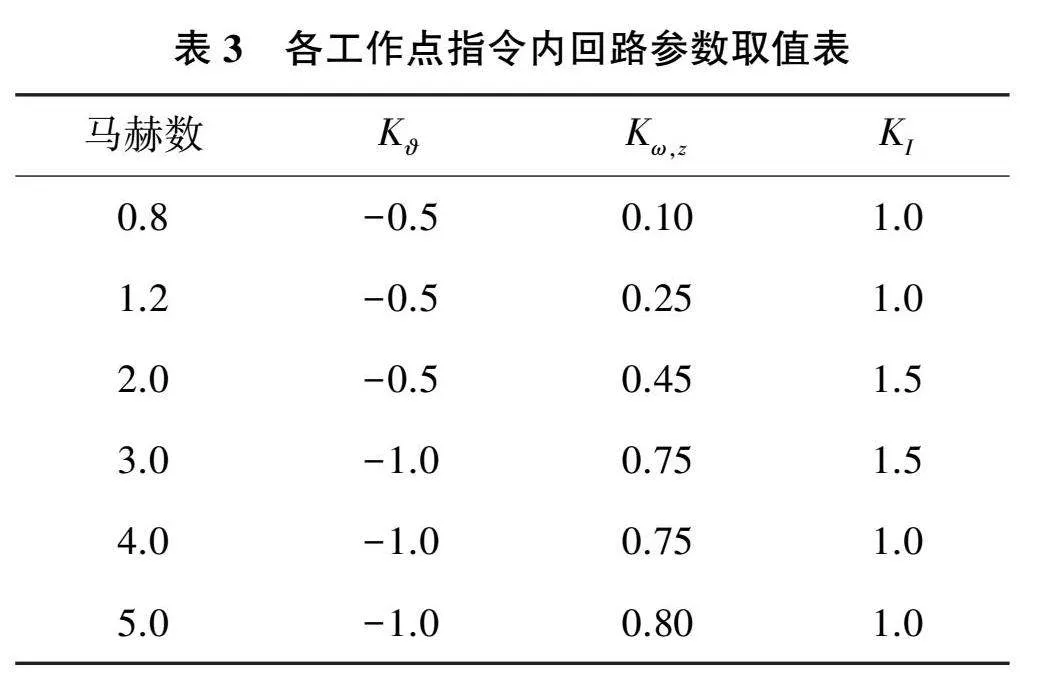
各工作點下基于俯仰角速率指令內回路的俯仰角控制律的參數選擇均在線性情況下進行了階躍響應驗證,參數選擇如表3所示。
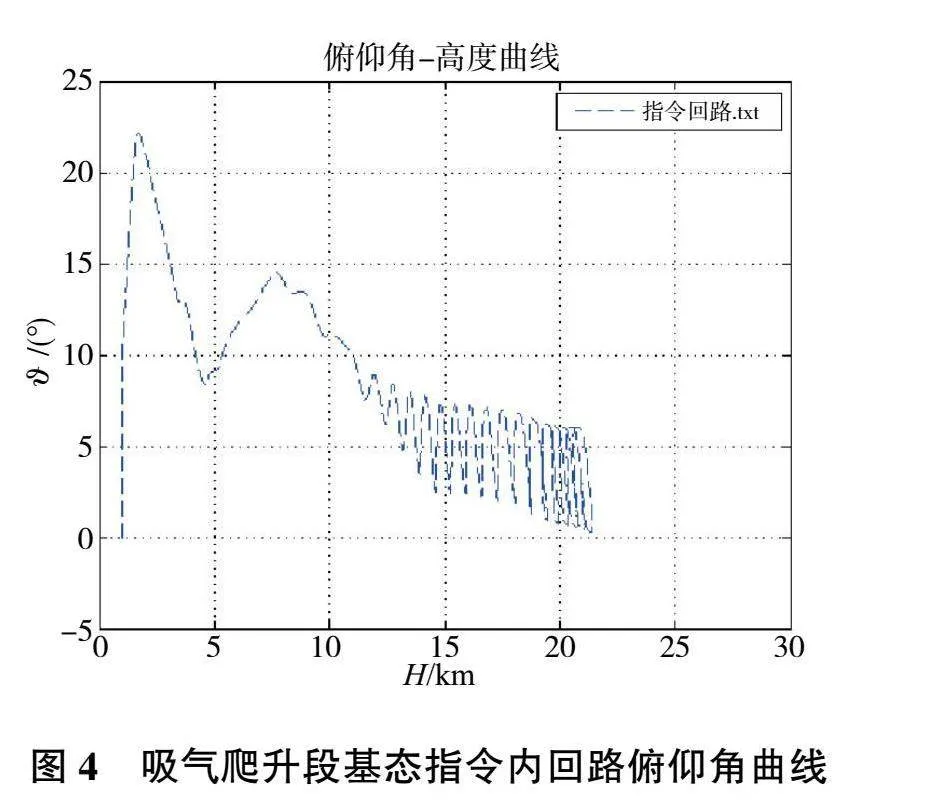
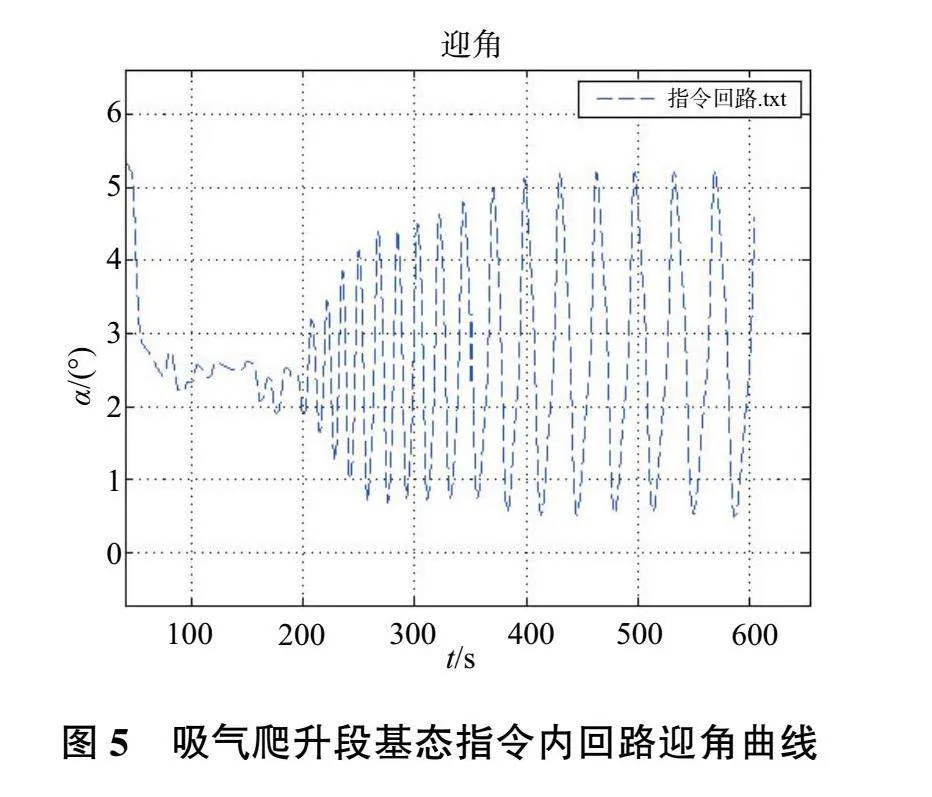
代入6自由度仿真中進行基態下的仿真,繪制各狀態量仿真曲線如圖4和圖5所示。可以看出使用指令內回路時,各狀態量均存在不同程度的振蕩。
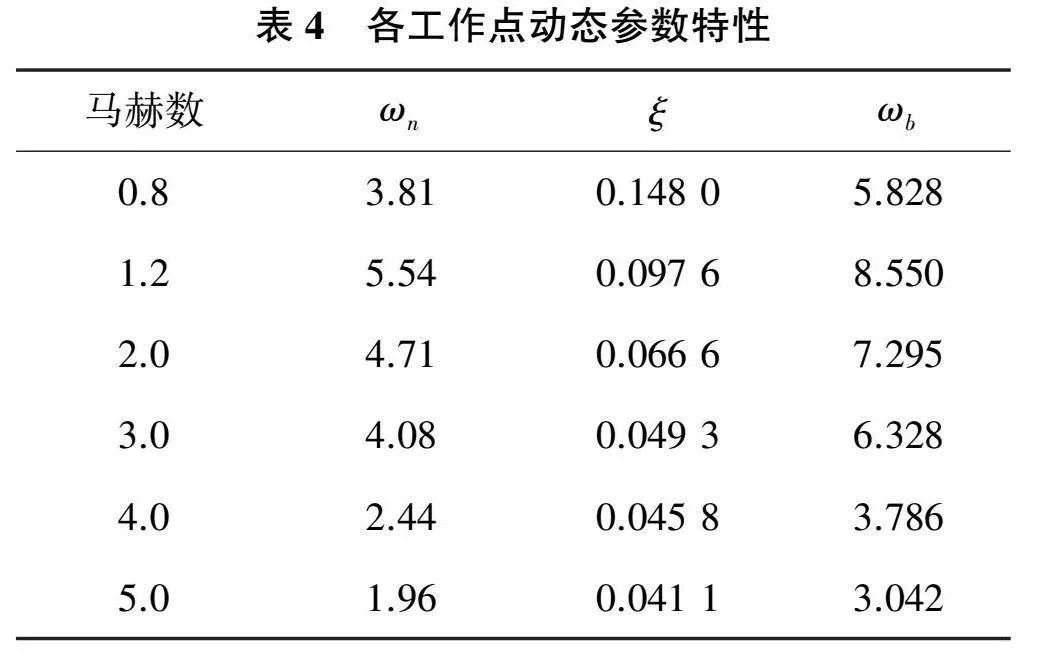
這是由于對象飛行器的自然頻率ωn較大時,其阻尼比ξ過小,使得系統帶寬ωb過大,帶寬ωb計算公式如式(4)所示。
ωb=ωn1-2ξ2+2-4ξ2+4ξ4(4)
各狀態點自然頻率、阻尼比和帶寬的具體數值如表4所示。
針對對象飛行器吸氣爬升段而言,希望其具有低動態特性,即對干擾響應較慢,具有較小的帶寬。同時在可控范圍內系統擁有較小帶寬的前提下,還要保證其擁有一定大小的阻尼比。
2.2"基于俯仰角速率阻尼內回路的俯仰角控制律
同樣,阻尼內回路將俯仰角速率反饋到升降舵會增大縱向阻力力矩,這將顯著提升對象飛行器的低動態特性。其控制律具體表達式如下式所示。
δe=K(-c)+Kω,zωz(5)
由于需要在保證小帶寬的情況下盡可能增大阻尼比,因此將阻尼比ξ=0.5~0.6作為依據進行后續的調參。從表3可以看出其帶寬最大在1.2Ma工作點附近,因此下面以該工作點為例進行內外回路調參。
1)角速率反饋增益設計
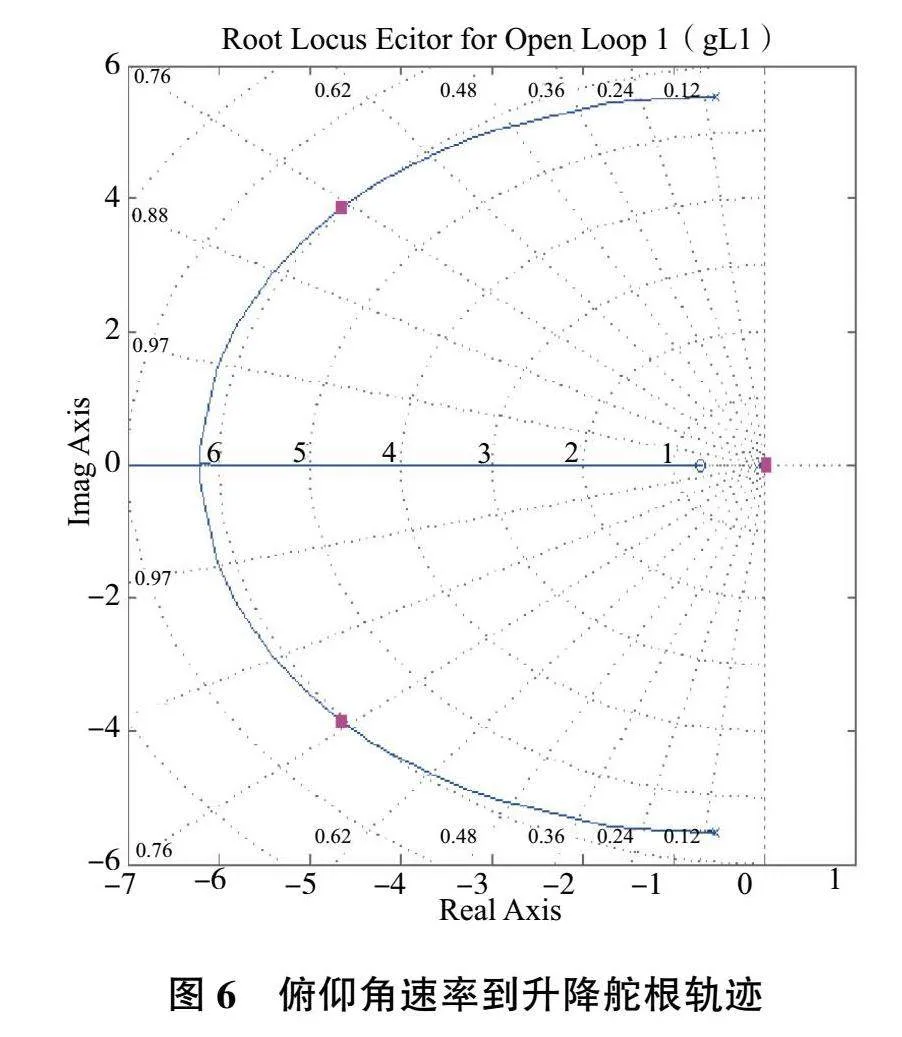
計算得到俯仰角速率到升降舵的傳遞函數為
ΔωzΔδe=17.868s(s+0.697 5)(s-0.024 83)(s2-0.025 83s+0.001 145)(s2+1.082s+30.72)。
繪制其根軌跡如圖6所示,隨著反饋增益Kω,z的增大,短周期共軛極點左移,短周期穩定性變好,短周期阻尼增大;長周期共軛極點向實軸靠近,隨后靠近虛軸。
繪制俯仰角速率到升降舵和俯仰角到升降舵的Bode圖對比如圖7所示。從圖中可以看出,俯仰角速率低頻段斜率為正,表明傳函中存在微分環節,因而反饋俯仰角速率相當于在原點處配置了一個0點,使得極點在增益Kω,z增大時向其移動。中頻段俯仰角速率的帶寬相對較大,響應較快。因此加入俯仰角速率反饋可以有效增大系統阻尼比,改善系統動態性能。
原系統阻尼為0.097 6,由于想要保證加入控制后系統阻尼比取值在0.5~0.6之間,在此取Kω,z為0.3和0.4分別對應于短周期阻尼為0.55和0.69兩種情況,進行后續項參數設計。
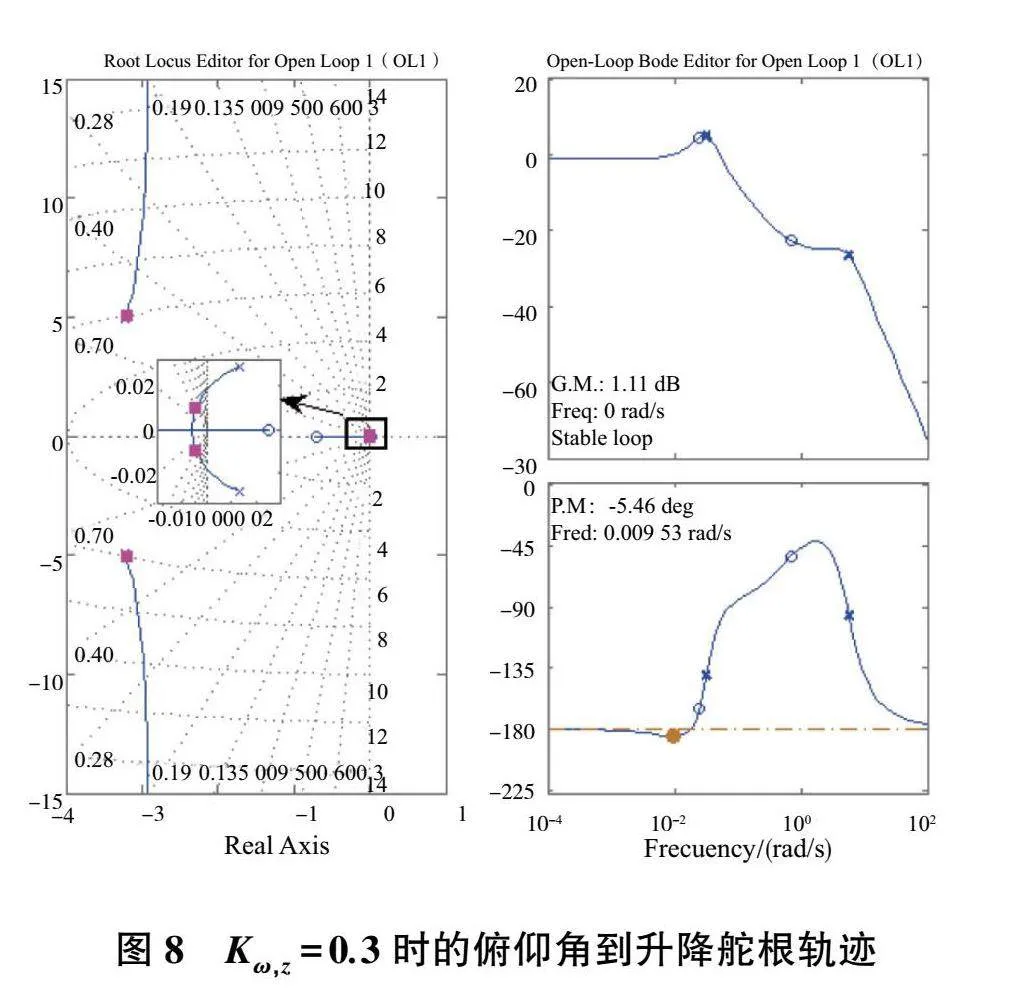
2)俯仰角反饋增益設計
圖8是俯仰角到升降舵的根軌跡圖及相位圖。可以看到俯仰角增益K越大,系統短周期阻尼比越小,階躍響應反應速度變快,帶寬越大。當K過大時,極點移動至右半平面,系統發散。
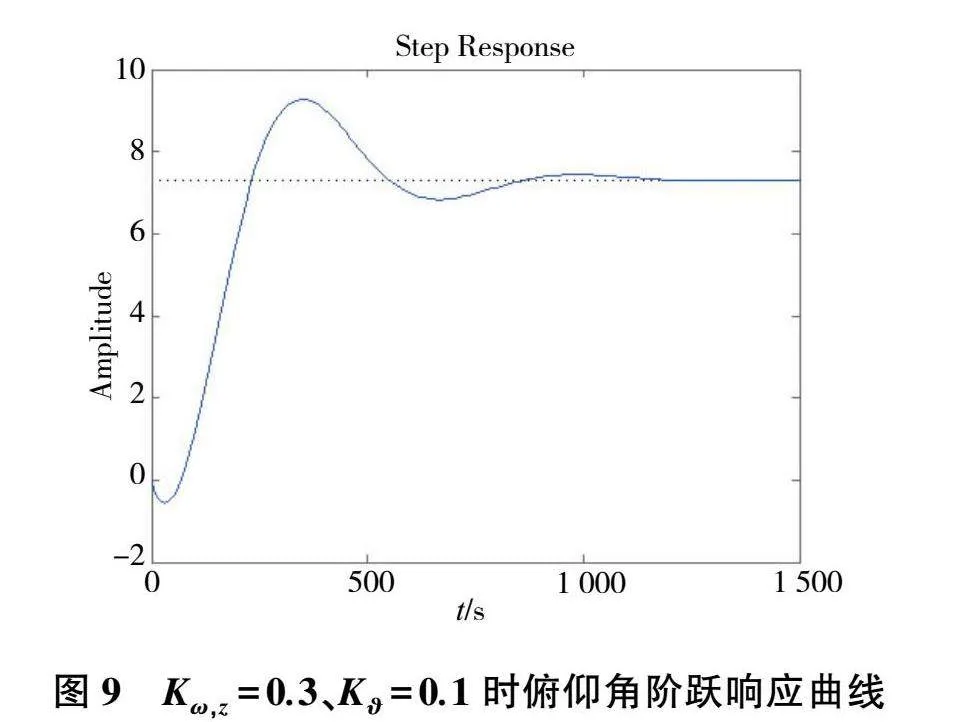
取K=0.1,對應系統阻尼比為0.53,繪制出在該取值下的俯仰角階躍響應曲線如圖9所示。
從圖9可以看出,系統調節時間過長,動態性能較差。但是,在整個制導控制系統中,俯仰角姿態控制為內回路,制導律結構為外回路,為了跟蹤飛行軌跡,沒必要過度追求內回路的時域和頻域特性,內外回路配合才能有優越的軌跡跟蹤性能。因此需要在非線性情況下進行仿真才能最終確定參數取值的優劣性。
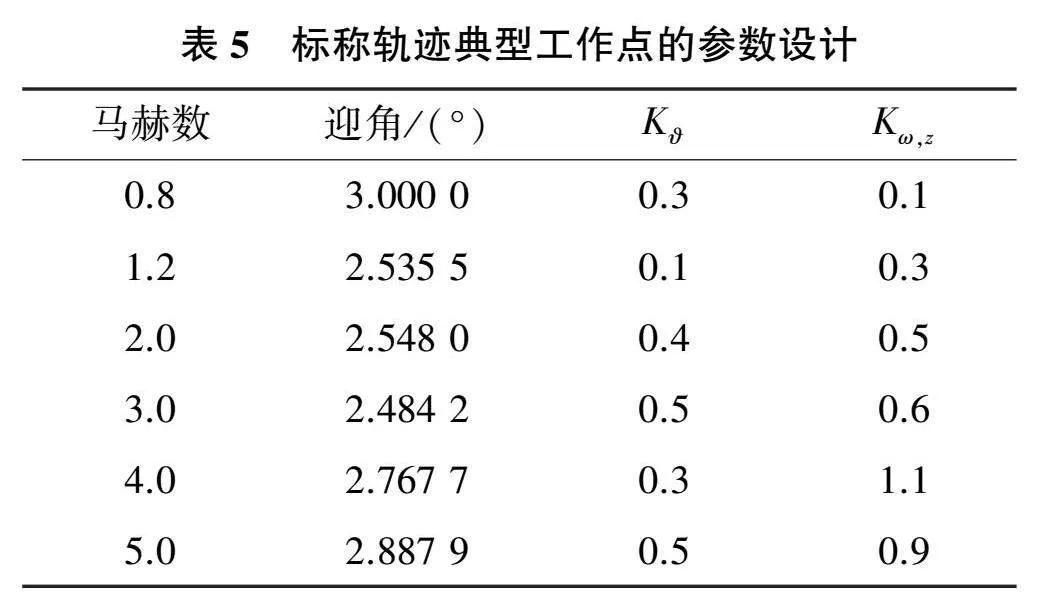
重復上述調參過程,對軌跡線上各個工作點進行控制律調參,給出標稱軌跡典型工作點的參數設計值如表5所示。
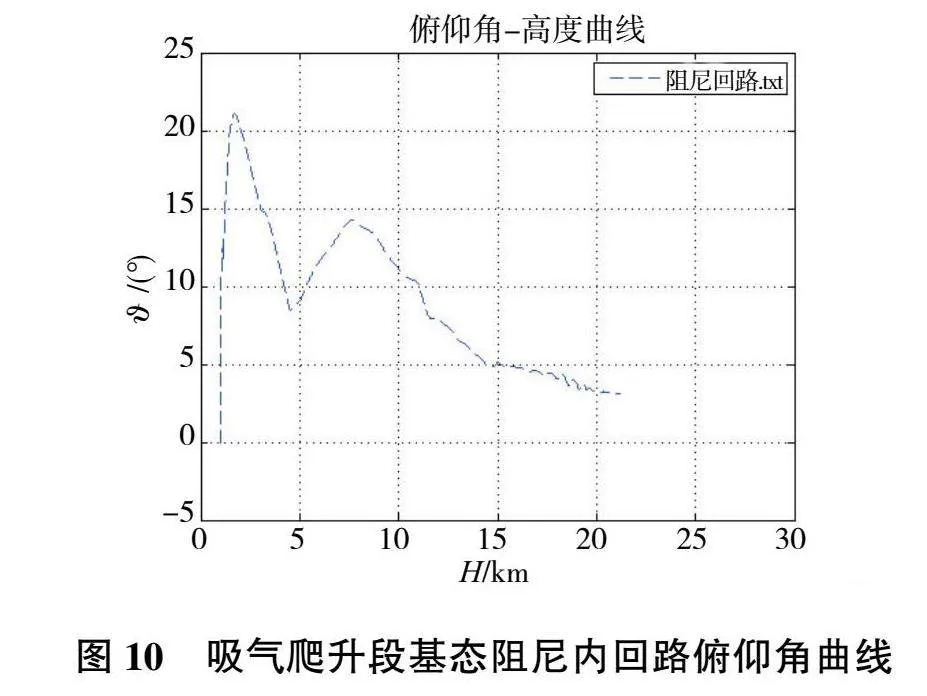
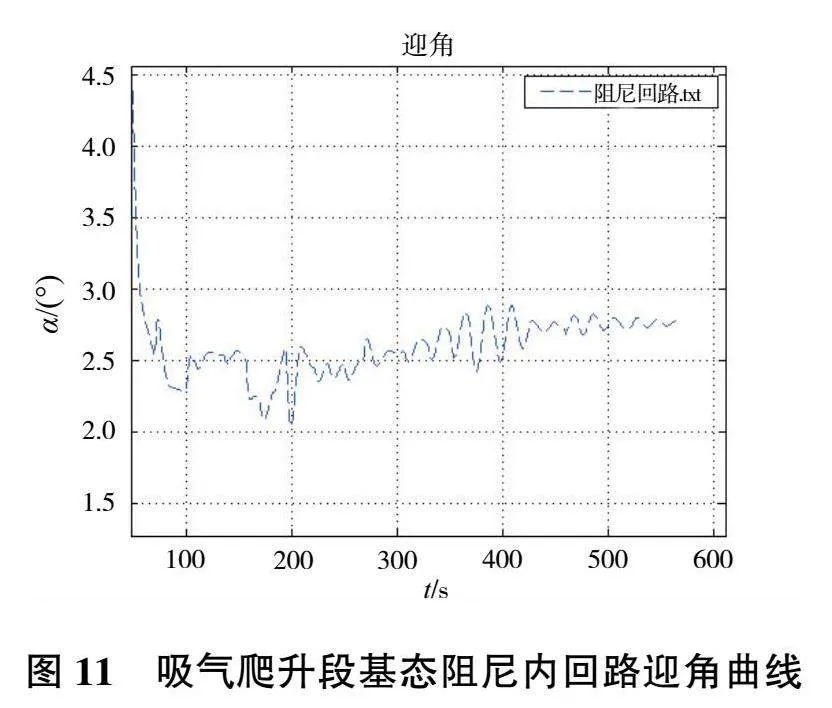
代入6自由度仿真中進行基態下的仿真,繪制各狀態量仿真曲線如圖10和圖11所示。可以看出使用阻尼內回路時,各狀態量相較于使用指令內回路有明顯優化。
3"魯棒性驗證仿真
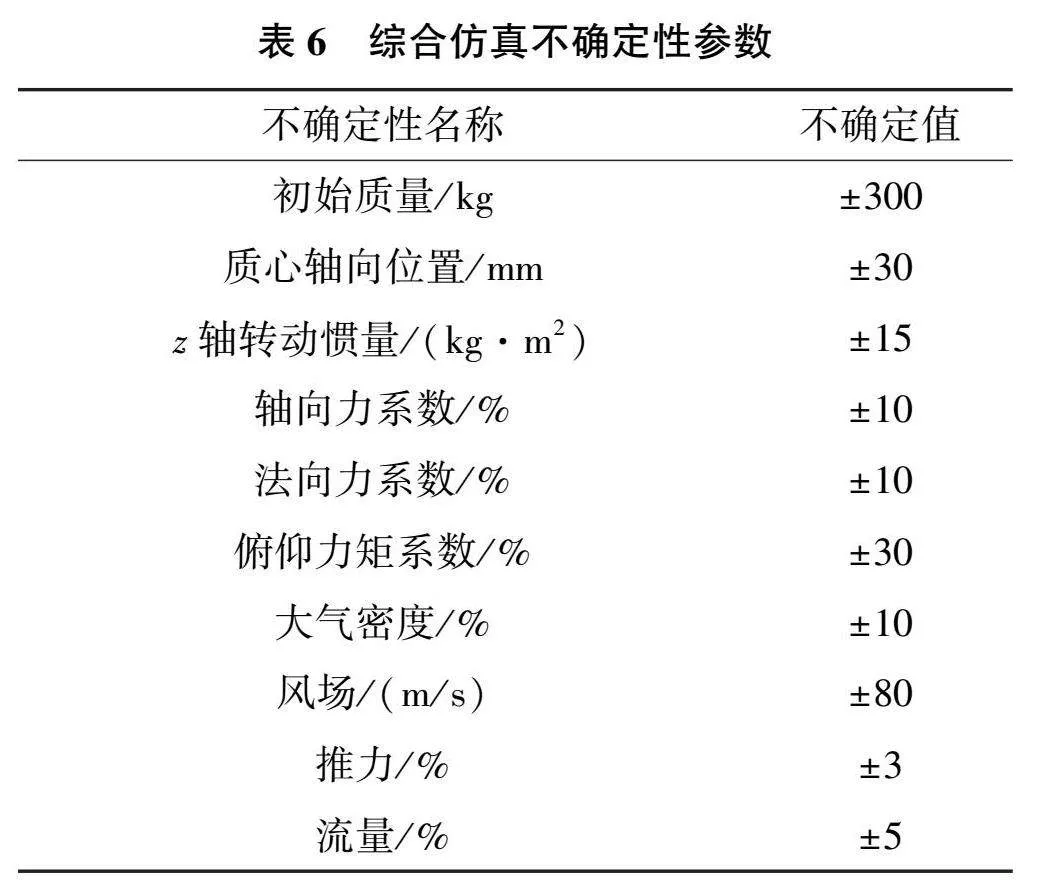
俯仰角控制律設計完畢后,需要在線性模型設計完成的基礎上進行6自由度非線性仿真,驗證各種不確定下的控制魯棒性,為了驗證新設計參數下阻尼內回路控制系統的魯棒性,斷開制導回路單對控制回路進行單項極限偏差仿真驗證,縱向偏差項如表6所示。
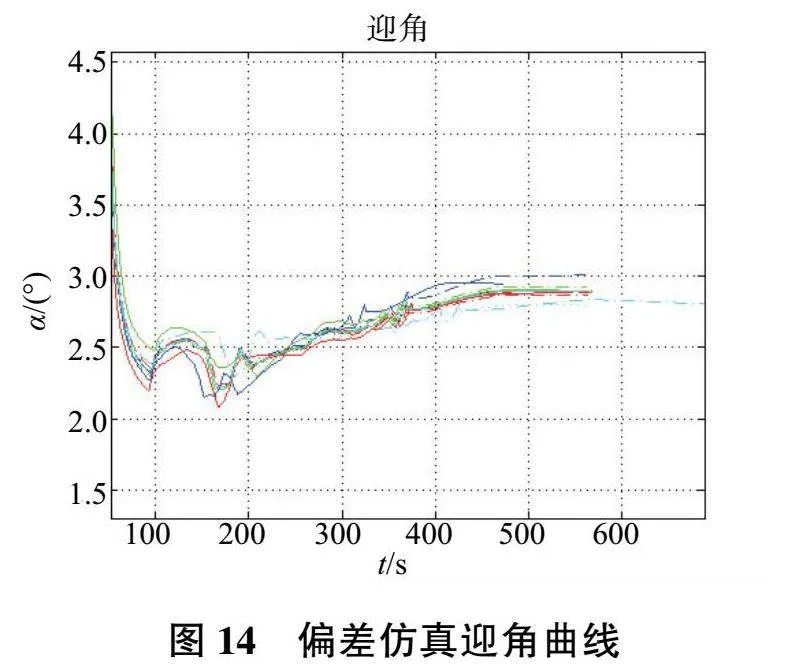
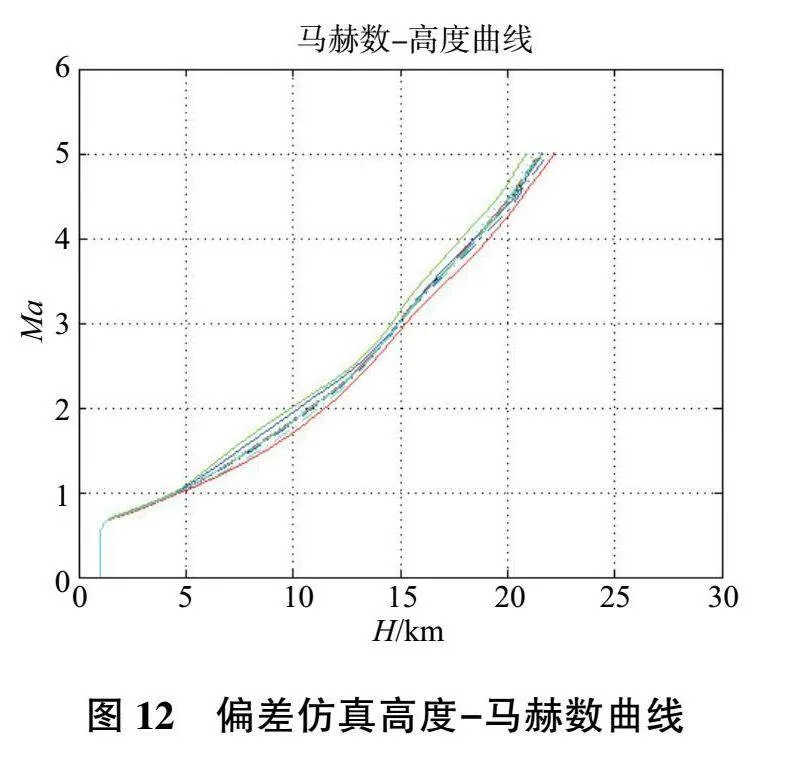
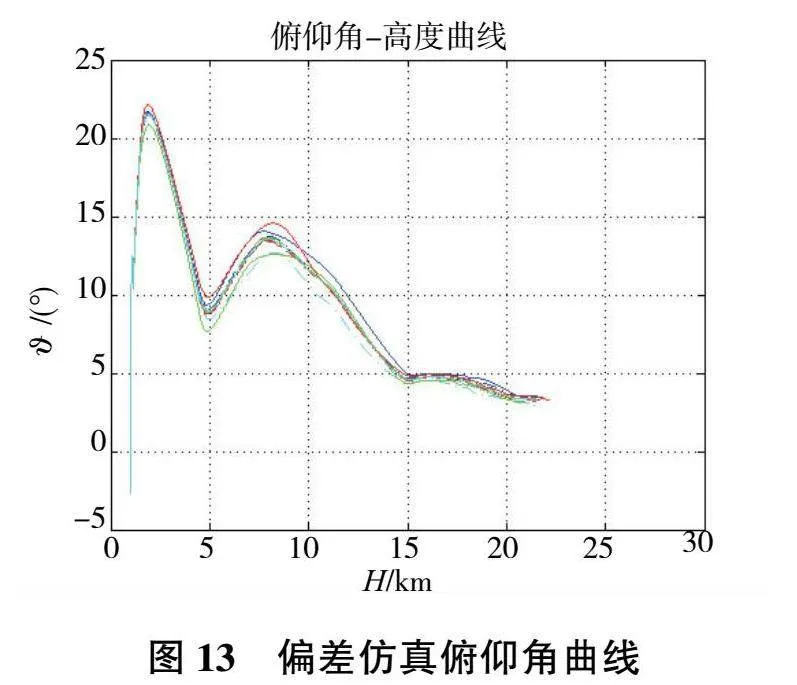
圖12、圖13和圖14給出了加入偏差不確定性后仿真結果中的高度-馬赫數曲線、俯仰角曲線和迎角曲線。對仿真曲線進行總結分析,可以得出以下結論:
1)對象飛行器吸氣爬升段采用俯仰角速率阻尼內回路的縱向控制方案可以有效增加系統阻尼,使得飛行器從高動態特性向低動態特性轉變,在偏差仿真驗證下均能有效控制俯仰角跟蹤指令;
2)俯仰角控制方案可靠有效,能夠實現進入馬赫數-高度窗口的任務,且馬赫數-高度仿真曲線相對集中,與標稱軌跡的偏差較小。
綜上,阻尼內回路經過調參設計后控制效果基本滿足小迎角飛行軌跡。
4"結語
組合動力原型機在吸氣爬升段過程中,在跨音速階段呈現出高動態特性,這使得俯仰角指令內回路不再適用,恰恰是結構簡單的俯仰角阻尼內回路可以有效增大系統阻尼,從而減小帶寬,使得飛行器保持低動態特性,在飛行過程中保持其姿態角的穩定性,從而保證在偏差仿真情況下完成飛行任務。
參考文獻:
[1] 姚偉利. 重復使用運載器能量管理段縱向制導控制技術研究[D]. 南京:南京航空航天大學,2017.
[2] 張明廉. 飛行控制系統[M]. 北京:航空工業出版社,1994:13-16.
[3] 黃筱鶯. 高超聲速飛行器助推段縱向控制技術研究[D]. 南京:南京航空航天大學,2019.
[4] 胡壽松. 自動控制原理[M]. 3版. 北京:國防工業出版社,1994.
[5] ATTAR M,WAHNON E,CHAIMOVITZ D. Advanced flight control technologies for UAVs[C]//2nd AIAA \"Unmanned Unlimited\" Conf. and Workshop amp; Exhibit. San Diego,California. Reston,Virigina:AIAA,2003.
[6] SHIN J Y,HARDEN C,SAEED N,et al. Pitch control law analysis and flight test demonstration of an executive transport aircraft[C]//Proceedings of the AIAA Guidance,Navigation,and Control Conference. Chicago,Illinois. Reston,Virigina:AIAA,2009:6120.
收稿日期:20220926
